






 该方案结合北斗卫星和UWB技术实现高精度定位,适用于大型工业场所。室内定位精度可达30厘米,室外3厘米至3米。系统包括UWB信标、定位终端和安全帽等设备,支持实时位置刷新和多种定位模式。此外,系统还具备轨迹回放、考勤管理、电子围栏、巡检记录和视频联动等功能。
该方案结合北斗卫星和UWB技术实现高精度定位,适用于大型工业场所。室内定位精度可达30厘米,室外3厘米至3米。系统包括UWB信标、定位终端和安全帽等设备,支持实时位置刷新和多种定位模式。此外,系统还具备轨迹回放、考勤管理、电子围栏、巡检记录和视频联动等功能。
大家好,我是北京华星智控公司小智,今天我给大家介绍室内外融合定位系统方案,该方案室外采用北斗卫星定位技术室内采用UWB定位技术从而实现室内外精确定位无缝切换,实现室内外的融合定位。
室内外融合定位系统, 该方案适用于室外需要定位的空间范围大同时又涉及室内定位的场景,例如油库、港口码头、露天矿山、钢厂、化工厂、电厂等场所,这些场所室内面积大同时又涉及到室内空间需要定位。

室外采用北斗卫星定位,不需要安装其他设备设施,不需要布线施工、不需要动火作业。 2:室内采用低成本UWB信标定位模式,信标采用电池供电,不需要布线施工。 3:室内定位精度优于30厘米,室外定位精度有3厘米,1米,3米可根据实际需要选择。 4:室内外定位自由切换毫秒级延迟。

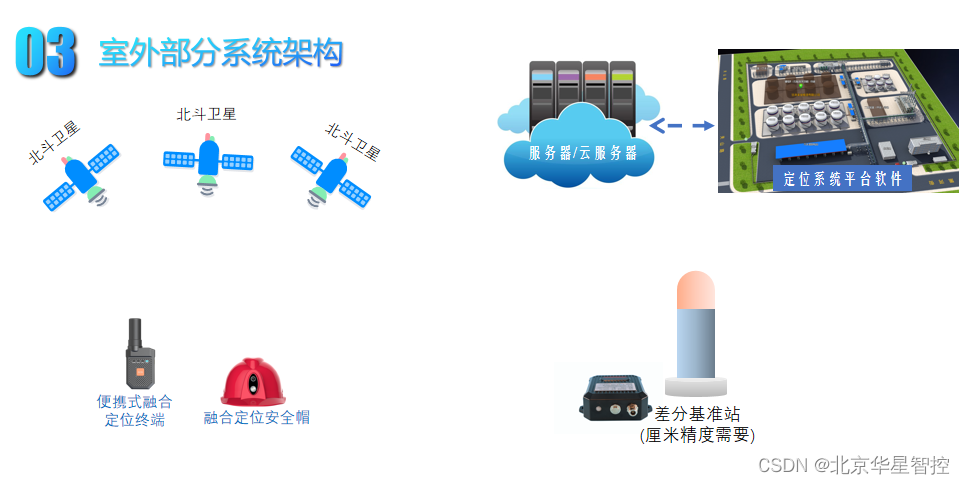
室内定位部分主要由现场需要安装的UWB信标,人员需要佩戴的便携式定位终端,融合定位安全帽,服务器和定位系统平台组成。数据可通过4G/5G或者WIFI网络传输到本地服务器或者云服务器。

接下来,我简单介绍下我们所使用的技术,UWB信标使用的是超宽带技术,它是一种无线载波通信技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,其所占的频谱范围很宽,所以叫做超宽带。
北斗差分技术主要是将斗差分基准站放置在已知位置,通过将基准站接收到的卫星信号与基于其已知位置的预期卫星信号进行比较,参考站可以确定卫星信号中的错误。 然后这些错误信息传输给到该地区的其他卫星接收设备,这些接收器可以使用这些信息来校正自己的卫星信号并提高定位精度。
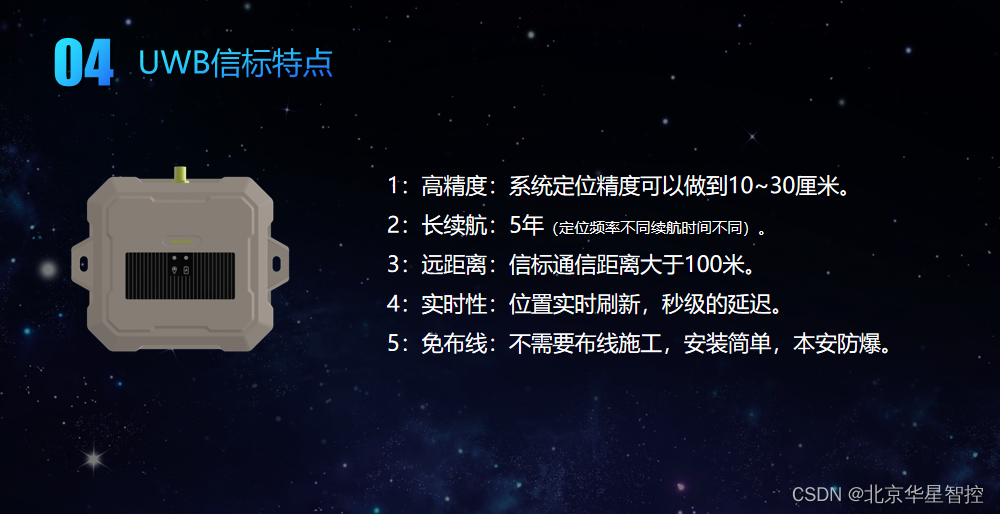
UWB信标特点1:高精度:系统定位精度可以做到10~30厘米。 2:长续航:5年。 3:远距离:信标通信距离大于100米。 4:实时性:位置实时刷新,秒级的延迟。 5:免布线:不需要布线施工,安装简单,本安防爆
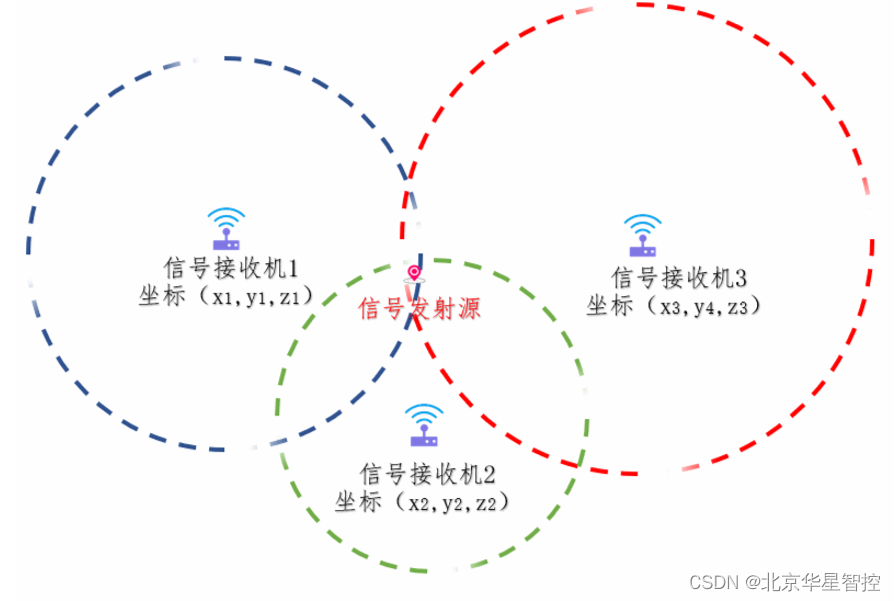
UWB定位的原理是这样的,如下右图所示,信号发射源发射信号脉冲,信号接收机需要提前安装在需要定位的空间里面,并需要自定义一个直角坐标系统,测绘出每个接收机的X,Y,Z坐标。信号发射源发射的脉冲飞行速度为光速C,脉冲到达3个信号接收机的时间分别为T1,T2,T3,通过光速C乘以时间T就可以算得三个距离L1,L2,L3,分别以三个距离为半径画出三个圆圈的交集处就是信号发射源的位置,这就是三角定位原理。
室内定位部分中使用到的UWB信标具有如下的一些特点:1:高精度:系统定位精度可以做到1030厘米。2:长续航:35年(定位频率不同续航时间不同)。3:远距离:信标通信距离大于100米。4:实时性:位置实时刷新,秒级的延迟。5:免布线:不需要布线施工,安装简单,本安防爆。
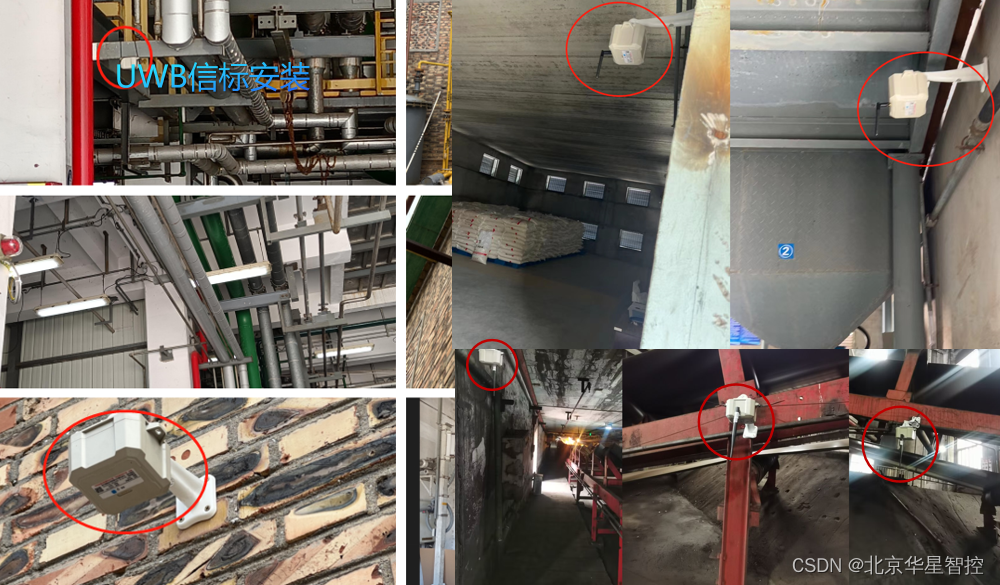
如图所示为我们的定位信标在一些项目现场的安装照片,途中红色圆圈圈起来的就是我们的UWB定位信标了,它不需要布线施工,安装简单方便,4个UWB信标最大可覆盖1万平米。
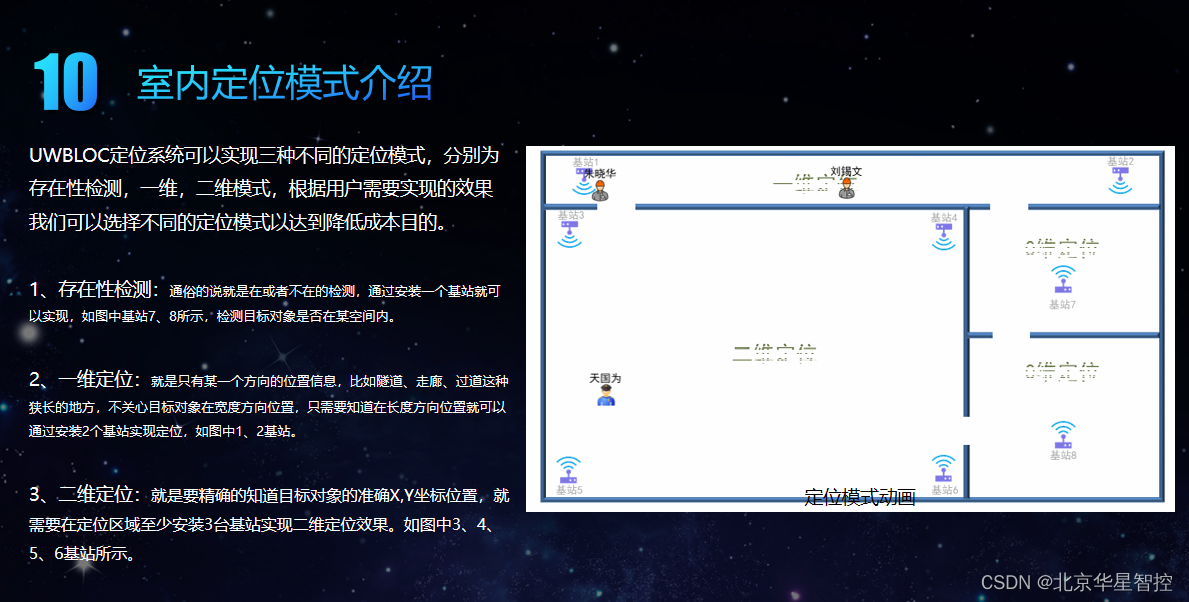
接下来我们介绍下室内定位模式的选择,室内定位系统可以实现三种不同的定位模式,分别为存在性检测,一维,二维模式,根据用户需要实现的效果我们可以选择不同的定位模式以达到降低成本目的。
1、存在性检测:通俗的说就是在或者不在的检测,通过安装一个基站就可以实现,如图中基站7、8所示,检测目标对象是否在某空间内。
2、一维定位:就是只有某一个方向的位置信息,比如隧道、走廊、过道这种狭长的地方,不关心目标对象在宽度方向位置,只需要知道在长度方向位置就可以通过安装2个基站实现定位,如图中1、2基站。
3、二维定位:就是要精确的知道目标对象的准确X,Y坐标位置,就需要在定位区域至少安装3台基站实现二维定位效果。如图中3、4、5、6基站所示。
如图所示是我们的差分基准站,差分基准站在室外需要厘米定位精度时候选用,其他定位精度不需要该设备,他的作用就是为其他的北斗定位终端提供误差修正数据从而实现厘米精度的定位。

下面的图片是差分基准站的安装照片,基准站通常安装在空旷的户外或者楼顶稳固的同时供电方便的地方。

下面是我们几款常用的融合定位终端,从左到右分别是便携式融合定位终端厘米精度版,便携式融合定位终端米级精度版,便携式融合定位终端长续航版,融合定位安全帽,这些终端我们根据具体需要去选择一种。

如图所示是我们便携式融合定位终端的佩戴照片,终端体积通普通烟盒大小。

如图所示是我们的融合车载定位终端,可以实现对车辆室内外的精确定位功能,室内外无缝切换。

如图所示是我们的融合定位终端在车辆上的安装照片,车顶上有2种样式的天线,蘑菇头样式的是卫星定位天线,棒状的是我们的UWB玻璃钢天线,实现车辆定位的同时也支持人车防撞 。

接下来我们介绍下定位系统的主要功能,如果所示通过3D建模可以实时显示人员在地图上的分布情况,掌握人员位置动向。

如图所示可实现 轨迹回放功能:可以查看任意时间段内某个目标对象的运动轨迹,追溯历史事件。

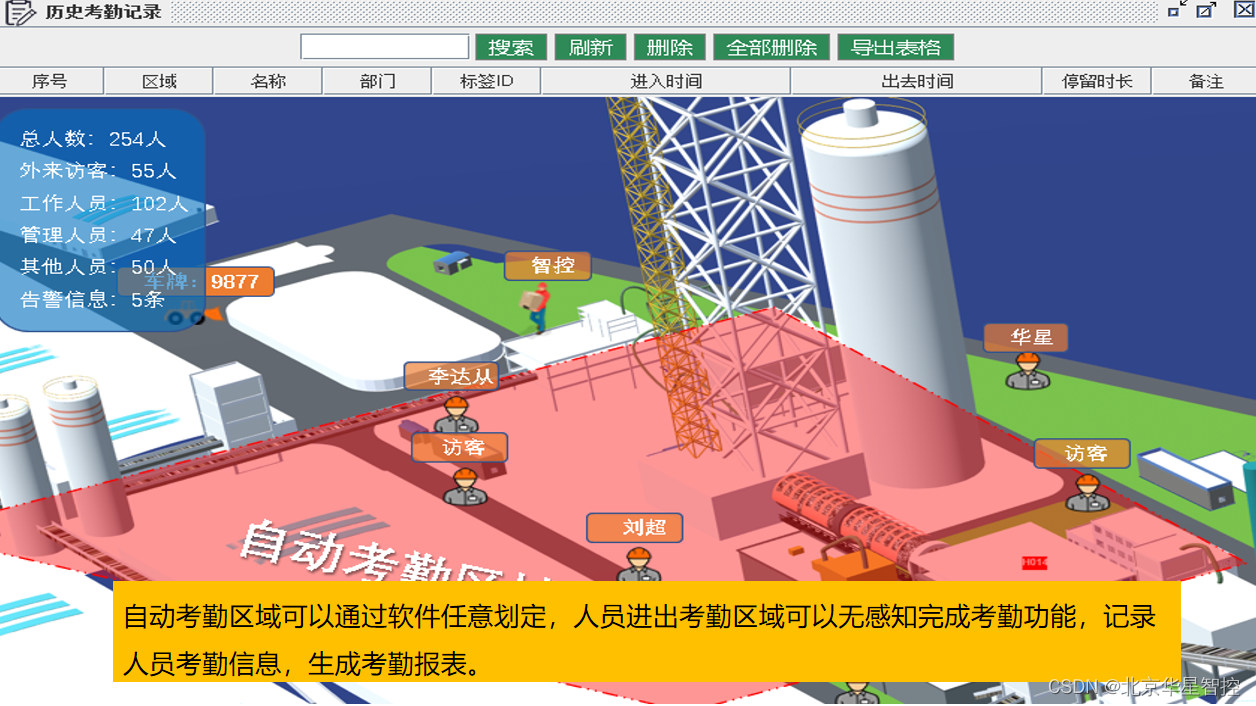
如果所示自动考勤功能,可以通过软件任意划定考勤区域,人员进出考勤区域可以无感知完成考勤功能,记录人员考勤信息,生成考勤报表。
如图所示,可通过软件对任意区域绘制电子围栏,对没有权限的人员靠近触发危险报警同时下发语音提示。

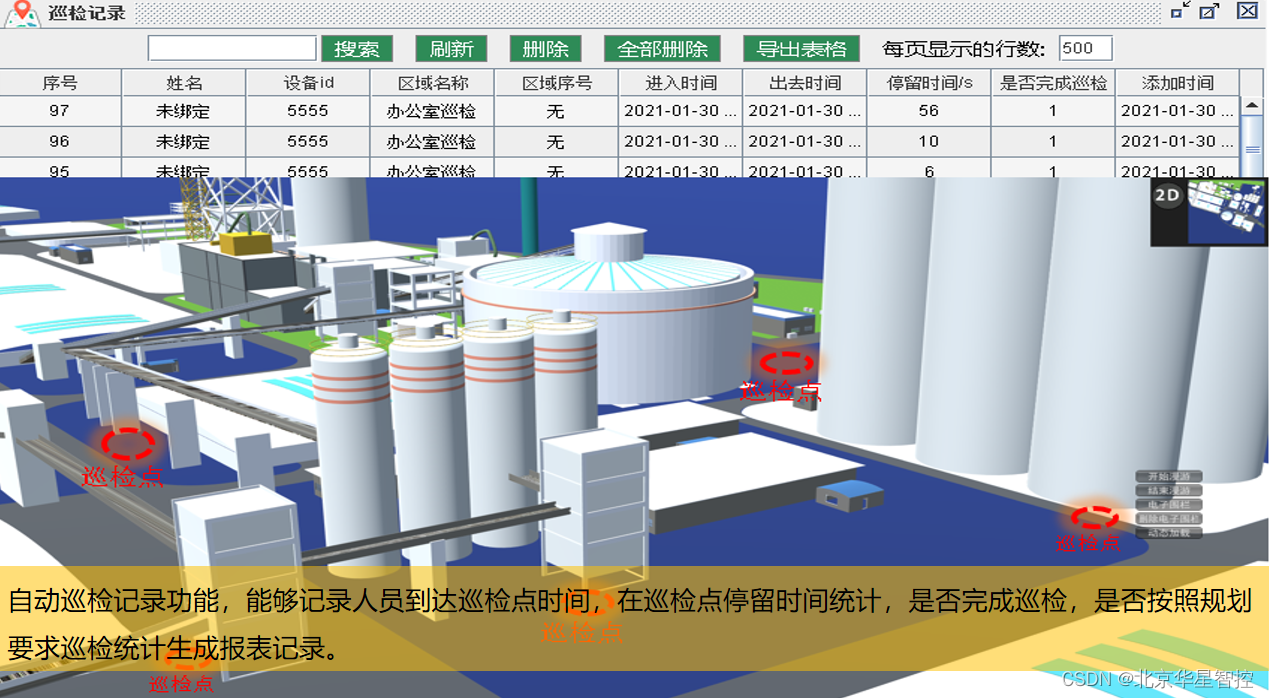
如图所示自动巡检功能,能够记录人员到达巡检点时间,在巡检点停留时间统计,是否完成巡检,是否按照规划要求巡检统计生成报表记录。
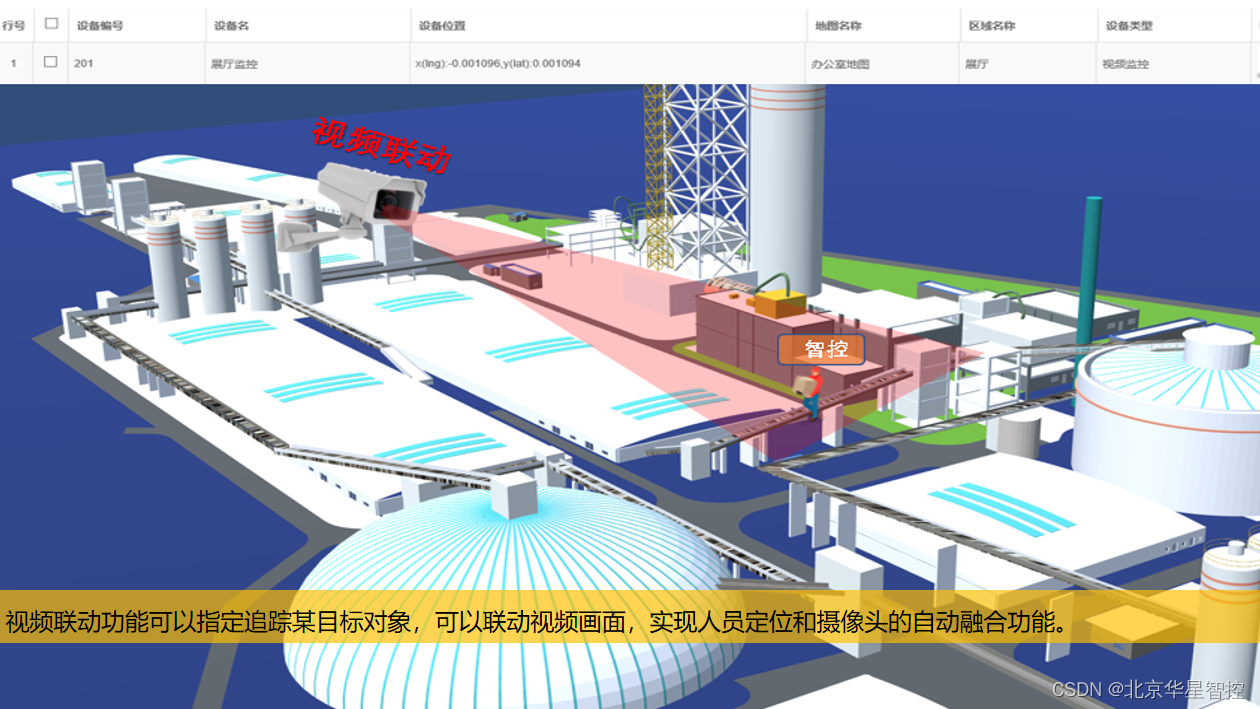
视频联动功能,可以指定追踪某目标对象,可以联动视频画面,实现人员定位和摄像头的自动融合功能。
系统还提供便捷的二次开发功能,开放数据接口,提供快速开发对接SDK,实现定位系统和其他平台数据对接。

小智今天的介绍到此结束,感谢大家的聆听。

















 707
707

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









