







噪声点与离群点。在获取点云数据时,由于设备精度、操作者经验、环境因素等带来的影响,以及电磁波衍射特性、被测物体表面性质变化和数据拼接配准操作过程的影响,点云数据中将不可避免地出现一些噪声点,属于随机误差。除此之外,由于受到外界干扰如视线遮挡,障碍物等因素的影响,点云数据中往往存在着一些距离主题点云较远的离散点,即离群点。
**点云处理中滤波目的。**滤波处理作为点云处理的第一步,对后续处理有很重要。只有在滤波处理流程中将噪声点、离群点、空洞、数据压缩等按照后续处理定制,才能更好地进行配准、特征提取、曲面重建、可视化等后续应用处理。点云数据集中每一个点表达一定的信息量,某个区域点越密集有用的信息量越大。孤立的离群点信息量较小,其表达的信息量可以忽略不计。
(1)直通滤波器
对于在空间分布有一定空间特征的点云数据,比如使用线结构光扫描的方式采集点云,沿z向分布较广,但x,y向的分布处于有限范围内。此时可使用直通滤波器,确定点云在x或y方向上的范围,可较快剪除离群点,达到第一步粗处理的目的。
(2)体素滤波器
体素的概念类似于像素,使用AABB包围盒将点云数据体素化,一般体素越密集的地方信息越多,噪音点及离群点可通过体素网格去除。另一方面如果使用高分辨率相机等设备对点云进行采集,往往点云会较为密集。过多的点云数量会对后续分割工作带来困难。体素滤波器可以达到向下采样同时不破坏点云本身几何结构的功能。
(3)统计滤波器
考虑到离群点的特征,则可以定义某处点云小于某个密度,既点云无效。计算每个点到其最近的k个点平均距离。则点云中所有点的距离应构成高斯分布。给定均值与方差,可剔除3∑之外的点。
(4)条件滤波
条件滤波器通过设定滤波条件进行滤波,有点分段函数的味道,当点云在一定范围则留下,不在则舍弃。
(5)半径滤波器
半径滤波器与统计滤波器相比更加简单粗暴。以某点为中心画一个圆计算落在该圆中点的数量,当数量大于给定值时,则保留该点,数量小于给定值则剔除该点。此算法运行速度快,依序迭代留下的点一定是最密集的,但是圆的半径和圆内点的数目都需要人工指定。
(6)双边滤波
双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折中处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。具有简单、非迭代、局部的特点 。双边滤波器的好处是可以做边缘保存。先简要介绍图像的双边滤波:
该算法是针对图像的空间域(spatial domain)和像素范围域(range domain),所以在设计的时候就会有两个权重,Ws和Wr,那么公式就可以简单的理解为:
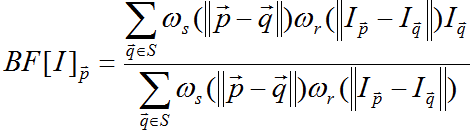
p为当前点,之所以是向量,因为有时候图像不只是灰度图像,也有三色图像,所以用向量表示p的多维空间,I则为图像,Ip就是表示图像I的p点,S为p的邻域集,q是邻域中的一个点,BF则为输出的图像。
,
σs和σc分别为空域滤波权值函数的标准差和像素相关性权值函数的标准差。
双边滤波的权重是ws和wr的乘积。对于ws来说,这就是普通的高斯滤波函数,其代入的坐标,sigmas是程序输入值,该函数是在空间临近度上计算的。而wr是计算像素值相似度(颜色空间)。
当图像在变化程度平缓的区域时,邻域中的像素值(RGB值)差距相差不大。此时wr无限接近于1,因此此时的双边就是普通的高斯滤波,达到对图像平滑的效果,如左图。
当图像在变化程度剧烈的区域,比如在边缘区域时,邻域中的像素值(RGB值)差距相差很大。此时wr朝0值趋近,颜色差值越大,wr越逼近0,最终整个式子的值逼近于0。最终的结果是权值为0。因此在最终计算时,该处将不影响输出值,如右图。
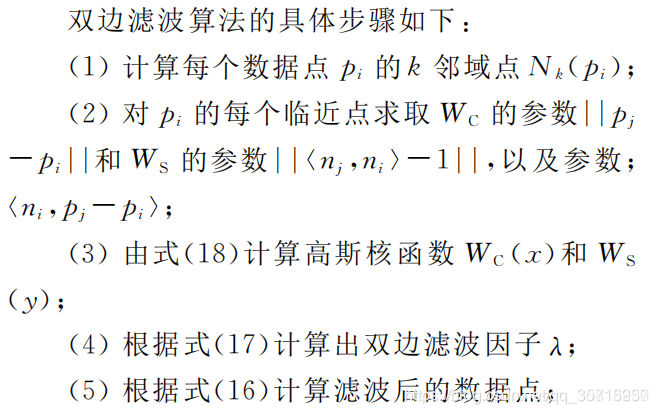
对于双边滤波不只用在图像,很多时候也会在处理点云数据的时候使用,对点云数据进行光滑处理。双边滤波算法主要用于对点云数据的小尺度起伏噪声进行平滑光顺。双边滤波应用于三维点云数据去噪,既有效地对空间三维模型表面进行降噪,又可以保持点云数据中的几何特征信息,避免三维点云数据被过渡光滑。在点云模型中设点p的k邻域点集及单位法向量分别为与 ,双边滤波可以定义为:



WC,WS 分别表示双边滤波函数的空间域和频率域权重函数,它们分别控制着双边滤波的平滑程度和特征保持程度。<n,pj-pi>为n与pj-pi的内积,, 为点 的法向量。
pcl::PointCloud<pcl::PointXYZ> 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









