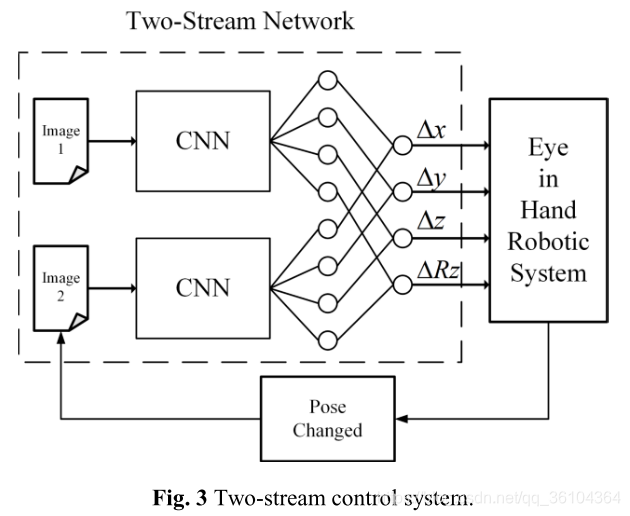
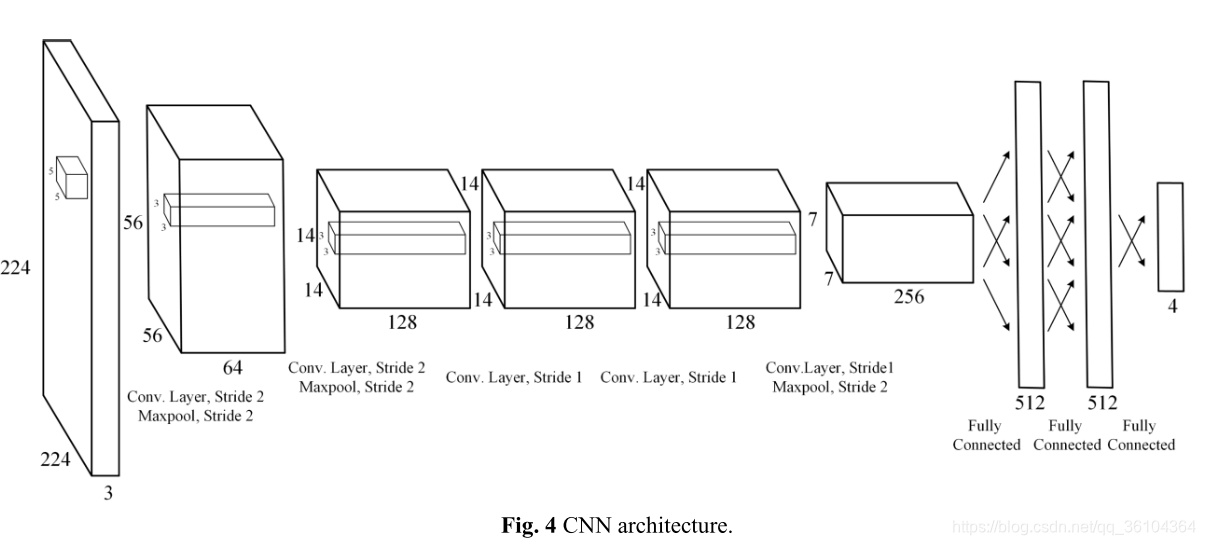
核心思想 该文提出一种基于深度学习的图像视觉伺服方法,整篇文章乏善可陈,就是利用一个神经网络输入当前位置和期望位置的图像,输出当前位置和期望位置得偏差,并根据这个偏差制定控制律。整个控制流程如下图所示 该文设计的神经网络结构如下图所示 算法评价 作者把这种方法归到基于图像的视觉伺服(IBVS)中,我觉得是不合适的,因为IBVS中计算的偏差,应该是图像坐标系中特征点之间的偏差,而不是转化成相机位姿之间的偏差,这应该属于PBVS,基于位置的视觉伺服。 如果大家对于深度学习与计算机视觉领域感兴趣,希望获得更多的知识分享与最新的论文解读,欢迎关注我的个人公众号“深视”。










 本文介绍了一种基于深度学习的图像视觉伺服方法,通过神经网络处理图像输入,计算相机位姿偏差,应用于实时控制。研究指出其与传统IBVS的区别,并强调了与PBVS的关系。关注计算机视觉和深度学习的朋友,请订阅'深视'获取更多专业知识。
本文介绍了一种基于深度学习的图像视觉伺服方法,通过神经网络处理图像输入,计算相机位姿偏差,应用于实时控制。研究指出其与传统IBVS的区别,并强调了与PBVS的关系。关注计算机视觉和深度学习的朋友,请订阅'深视'获取更多专业知识。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








