






文章目录
一、简介
直流有刷电机是一种内含电刷装置能将直流电转换为机械能的电机,在允许的供电范围内,供电即可工作,通过调整电压即可控制转速。
二、组成
定子
- 产生固定磁场的装置。
转子
- 由一个或者多个绕组构成,通电后在磁场中运动。
电刷
- 将外部电流输入到转子中。
换向器
- 改变绕组中电流的流向。
三、特点
- 控制简单,成本低廉
- 结构复杂,电刷和换向器之间有摩擦,换向时产生的火花会带有电磁干扰,故障多,维修量大,噪声大,寿命短。
四、电机参数
4.1 额定电压
电机正常工作的电压
4.2 额定电流
电机带负载情况下的负载电流
4.3 额定转速
电机带负载情况下的转速,单位转/分钟(RPM),如果电机没有带负载,此时的转速称之为空载转速。
4.4 额定扭矩
电机在额定电流下输出的力,单位为 kg.cm
4.5 减速比
电机原始转速和经过减速机之后的速度都比值,表示为N:1
五、工作原理
5.1 左手定则
伸开左手,使拇指与其余四指垂直且在一个平面内,让磁感线从手心流入,四指指向电流方向,大拇指指向的就是安培力方向(即导体受力方向)。

5.2 工作原理

- 当直流电源通过电刷和换向器为转子上的线圈供电时,线圈产生磁场,该磁场与定子产生的固定磁场相互作用,根据左手定则 ab受力方向向左,cd受力方向向右,此时转子逆时针运动。
- 当运动至换向器间隙时,此时电刷不再向电换向器供电,转子不再受磁场力的作用,但是会由于惯性继续向逆时针方向运动。
- 直到电刷重新向换向器供电,此时流经ab与cd的电流方向发生改变,但是转矩方向不变,从而实现电机的连续转动。
六、测速原理
6.1 磁电式编码器

磁电编码器由磁盘和霍尔传感器组成,使用霍尔元件检测磁场的变化,将磁场的变化转换为脉冲信号的变化,单片机可以通过单位时间内脉冲的个数计算出电机的转速。
6.2 光电式编码器

- 光电编码器包含一个光源和一个光电传感器,以及一个编码盘(也称为光栅盘)。光源发出光线照射到编码盘上,编码盘上刻有光栅线或编码孔,这些图案会随着编码盘的旋转而改变光线的透射或反射情况。
- 当编码盘旋转时,光栅线或编码孔会导致光电传感器接收到不同的光信号强度或模式。光电传感器根据接收到的光信号变化,将其转换为相应的电信号。这些电信号通常是脉冲信号,其频率和相位与编码盘的旋转速度和方向直接相关。
- 通过测量这些电信号的频率和脉冲数,可以计算出编码盘的旋转速度。通常,每秒输出的脉冲数(即脉冲频率)与编码盘的旋转速度成正比。此外,为了判断旋转方向,编码盘通常设计有两个相位差相差90度的光码输出,根据双通道光码的状态变化可以确定电机的转向。
七、电机驱动
7.1 H桥驱动
直流有刷电机通常使用H桥电路驱动,它由4个三极管组成。
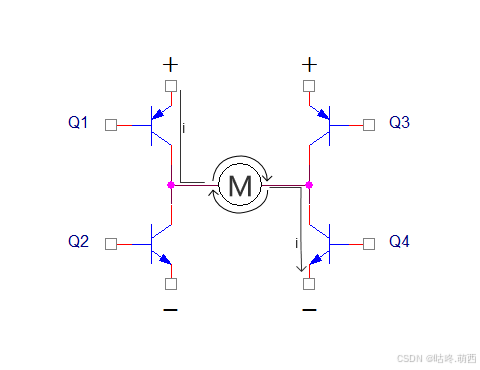
当Q1和Q4导通时,电流将经过Q1从左往右流过电机, 在经过Q4流到电源负极,这时图中电机可以顺时针转动。
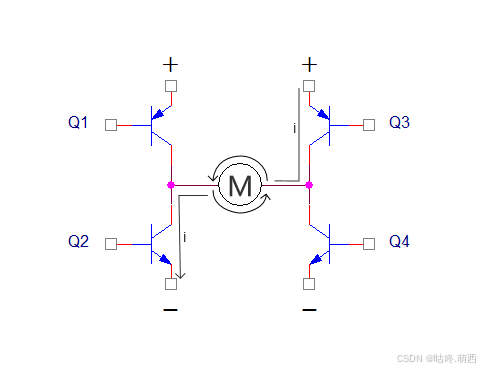
当Q2和Q3导通时,电流将经过Q3从右往左流过电机, 在经过Q2流到电源负极,这时图中电机可以逆时针转动。
| Q1 | Q2 | Q3 | Q4 | |
|---|---|---|---|---|
| 正转 | 1 | 0 | 0 | 1 |
| 反转 | 0 | 1 | 1 | 0 |
7.2 电压采集
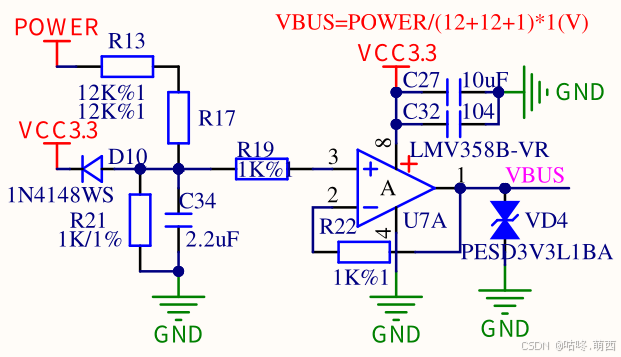
- 使用分压电路采集电机电源电压 VBUS = Power / (12 + 12 + 1)
- 使用ADC采集VBUS的电压即可算出 Power 值
7.3 电流采集
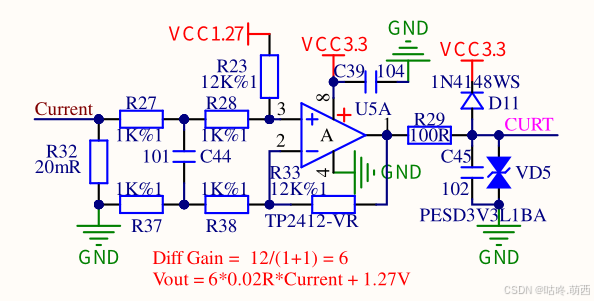
- 电机采样电压 = 0.02 * Current,由于电机采样电压很小,需要通过放大电路将电压放大
- 通过放大电路将电机采样电压放大6倍,再加上偏置电压VCC1.27得到输出电压为(0.12 * Current)+ 1.27
- 通过单片机测量的输出电压可以算出采样电流为 (Vout - 1.27)/ 0.12 A
7.4 温度测量
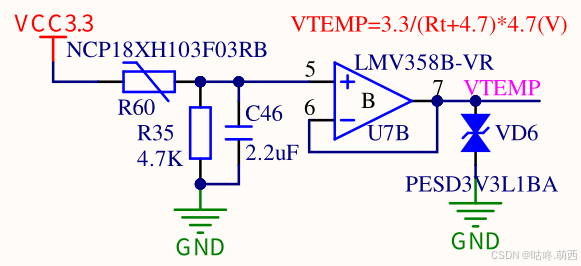
- Vtemp = 4700 / (Rt + 4700) * 3.3 V
- 单片机通过测量Vtemp可以得知此时热敏电阻阻值,
- 再通过热敏电阻阻值可以知道实际温度 T = 1 / (ln(Rt / R0) / B + 1 / T2)
- 其中R0是常温下的阻值
- T1和T2指的是K度即开尔文温度,其中T2(273.15+25)为常温温度,T1 为当前电阻的温度
- B值是热敏电阻的重要参数


















 6040
6040

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











