







纹理是图像分析中的常用概念,是由于物体表面物理属性不同所引起的能够表示某个特定表面特征的灰度或者颜色信息。与其他图像特征相比,纹理反映了图像灰度模式的空间分布,包含了凸显更多表面信息及其周围环境的关系,更好的兼顾了图像的宏观信息与微观结构。但是在现实世界中的纹理并不像实验中的那么规整,存在着很多变化,而且,很多纹理分类的方法计算复杂度过高,难以实用化。为了解决这些问题,可以采用改进型的局部二值模式进行纹理分类。改进型的局部二值模式(Local Binary Patterns)具有灰度不变性、旋转不变性、.能够多分辨率分析等优点。
1 概述
二维纹理分析有许多潜在的应用,比如工业表面检查、遥感、生物图片分析,但是很少的例子能够成功发现纹理。主要的问题是现实世界中,由于方向、尺度及其他视觉外观的变化导致纹理常常是不均一的,灰度尺度不变性通常变得非常重要,因为不均匀的光照或图像内大幅变化变化。然而已经提出的纹理测量算法计算量太大,比如灰度共生矩阵等算法。
绝大多数纹理分类方法都显示或隐式的假设,待分类的位置样本与训练样本在空间大小、方向和灰度尺度属性上都一致。现实中的纹理受变化的光照条件影响,可以存在任意空间分辨率和旋转方向。
1.1 纹理
纹理是图像分析中常用的概念,是由于物体表面物理属性不同所引起的能够表示某个特定表面特征的灰度或者颜色信息。纹理是有许多相互接近的、互相编制的元素构成。在直观上反映为:图像的亮度、颜色的变化。
特点:与其他图像特征相比,纹理反映了图像灰度模式的空间分布,包含了凸显更多表面信息及其周围环境的关系,更好的兼顾了图像的宏观信息与微观结构。
1.2二维纹理
二维的纹理分析,具有很多潜在的应用。例如,工业表层检查,远程监控,生物制药图像分析等等领域。但是在实际应用时,会存在很多问题。主要的问题在于现实世界中的纹理并不像实验中的那么规整,存在着很多变化,
例如:1. 由于非均匀光源导致的光照变化;
2.实际的情况下,物体方向是随机的;
3.空间尺度不一致。
而且,很多纹理分类的方法计算复杂度过高,难以实用化。为了解决这些问题,可以采用改进型的局部二值模式进行纹理分类。改进型的局部二值模式(Local Binary Patterns)具有以下优点:
1.具有灰度不变性;
2.具有旋转不变性;
3.能够多分辨率分析;
2 LBP算法
2.1 LBP局部二值模式
LBP (Local Binary Pattern)——由T. Ojala、 M.Pietikäinen和 D. Harwood 在1994年提出,是一种用来描述图像局部纹理特征的算子[1][2]。 原始的LBP算子定义为在3*3的窗口内,以窗口中心像素为阈值,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3领域内的8个点可产生8bit的无符号数,即得到该窗口的LBP值,并用这个值来反映该区域的纹理信息。
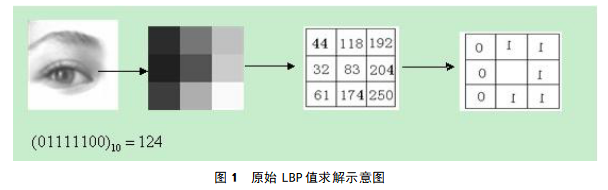
以图1为例介绍原始LBP值求解过程:
首先选择像素点83为中心点,选择中心点周围的8个作为邻居结点,邻居结点的像素值低于83的标记为0,比83高的标记为1,用0或1标记原始像素值,则中心点的像素值被LBP值所取代,假设以左上角的像素点作为起始点,顺时针标记得到LBP值的二进制表示为:(01111100)2对应十进制为124,即中心点像素值为83的对应的LBP值为124,以此类推求出整个图像所有点的LBP值,将LBP值代替原始像素值,得到这幅图像的LBP特征,并输出转化后的LBP纹理图像。
2.2 直方图统计
提取图像特征的目标无非就是为了进行分类,我们把一幅灰度图像转化为了LBP特征图像,从理论上讲并没有实现降维,也无法进行分类。这时引入直方图统计,,也就是统计LBP特征0~255各占的比例,进行数据的降维。将向量输入分类器中进行分类。由于只有256维特征,分类的效果并不好。
于是引入了图像分块处理的方法,如在人脸识别中,把脸分为7*7,5*5的区域,并对这49,25个小区域进行LBP处理,将每个小区域的直方图进行串联,就可以得到整个图像的LBP直方图。并对这个直方图进行分类处理,这样可以大大的增强分类的效果。但是分类数据维度也大大增加了,如果是7*7区域,数据维度为7*7*256=12544维。可以看出数据的维度还是比较大,所以需要进一步进行降维,这里就涉及了另外一个概念:Uniform LBP,即等价模式LBP,将在第四部分介绍。
3 具有灰度不变性和旋转不变性的LBP算法
3.1 灰度不变性
基本的LBP算子最大的缺陷在于它只覆盖了一个固定半径范围内的小区域,不能满足不同尺寸和频率纹理的需要。
未来适应不同尺度的纹理特征并达到灰度和旋转不变性的要求,2002年Ojala等人在PAMI上又发表了一篇关于LBP的文章,该文章非常详细清楚的阐述了多分辨率、灰度尺度不变和旋转不变、等价模式的改进的LBP特征[3][4]。对LBP算子进行了发展和改进,将3*3领域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的LBP算子允许在半径为R的圆形邻域内有任意多个像素点。

改进的LBP值求解示意图如图2所示:这里所给的是半径R=1(pixel)像素,像素点个数P=8时的情况。可以发现&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2300
2300











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











