









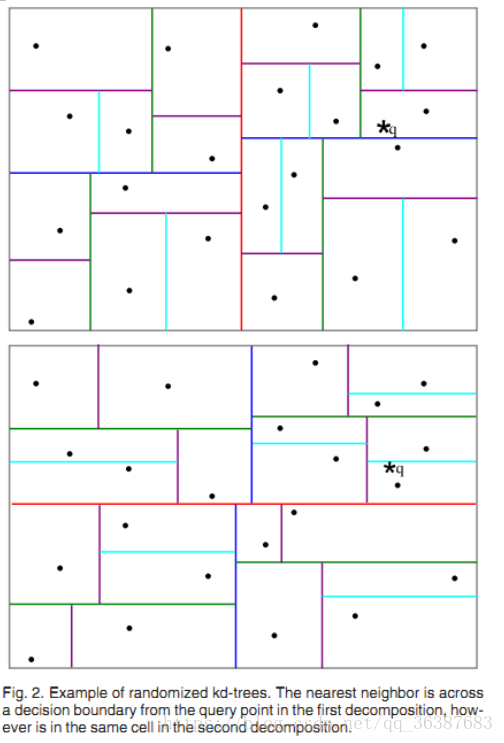
1、 随机k-d树算法(The Randomized k-d TreeAlgorithm)
a. Classick-d tree
找出数据集中方差最高的维度,利用这个维度的数值将数据划分为两个部分,对每个子集重复相同的过程。
参考http://www.cnblogs.com/eyeszjwang/articles/2429382.html。
b. Randomizedk-d tree
建立多棵随机k-d树,从具有最高方差的N_d维中随机选取若干维度,用来做划分。在对随机k-d森林进行搜索时候,所有的随机k-d树将共享一个优先队列。
增加树的数量能加快搜索速度,但由于内存负载的问题,树的数量只能控制在一定范围内,比如20,如果超过一定范围,那么搜索速度不会增加甚至会减慢
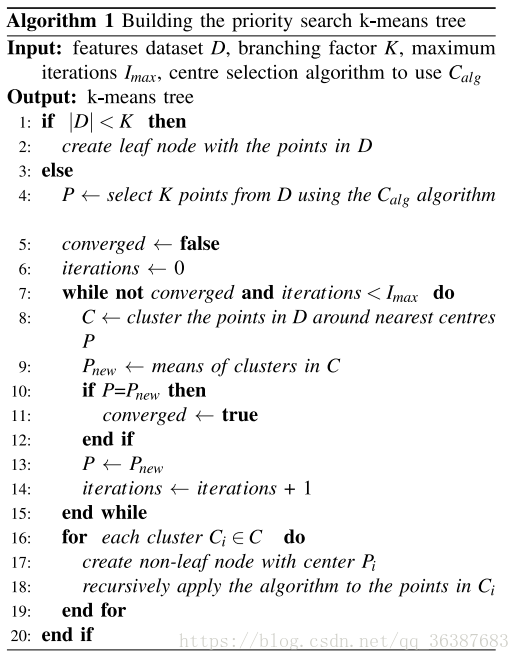
2、 优先搜索k-means树算法(The Priority Search K-MeansTree Algorithm)
随机k-d森林在许多情形下都很有效,但是对于需要高精度的情形,优先搜索k-means树更加有效。 K-means tree 利用了数据固有的结构信息,它根据数据的所有维度进行聚类,而随机k-d tree一次只利用了一个维度进行划分。
2.1 算法描述
步骤1 建立优先搜索k-means tree:
(1) 建立一个层次化的k-means 树;
(2) 每个层次的聚类中心,作为树的节点;
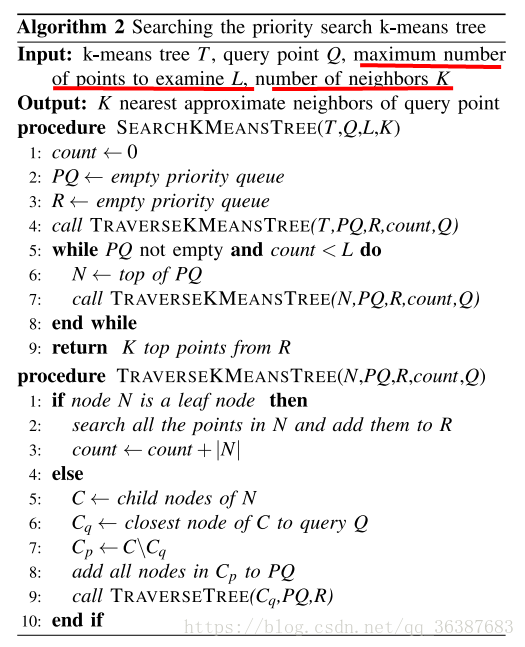
步骤2 在优先搜索k-means tree中进行搜索:
(1) 从根节点N开始检索;
(2) 如果是N叶子节点则将同层次的叶子节点都加入到搜索结果中,count += |N|;
(3) 如果N不是叶子节点,则将它的子节点与query Q比较,找出最近的那个节点Cq,同层次的其他节点加入到优先队列中;
(4) 对Cq节点进行递归搜索;
聚类的个数K,也称为branching factor 是个非常主要的参数。
建树的时间复杂度 = O( ndKI ( log(n)/log(K) )) n为数据点的总个数,I为K-means的迭代次数。搜索的时间复杂度 = O( L/K * Kd * ( log(n)/(log(K) ) ) = O(Ld ( log(n)/(log(K) ) )。
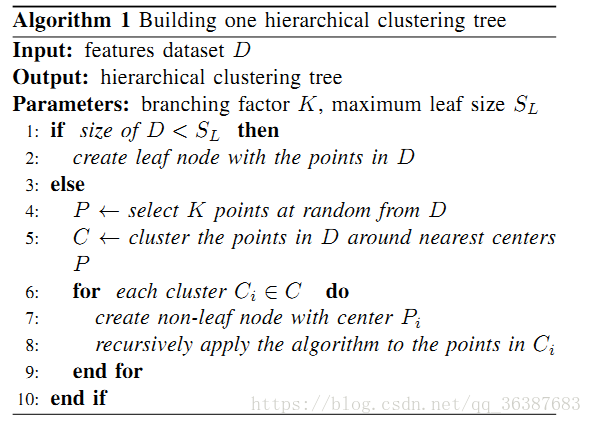
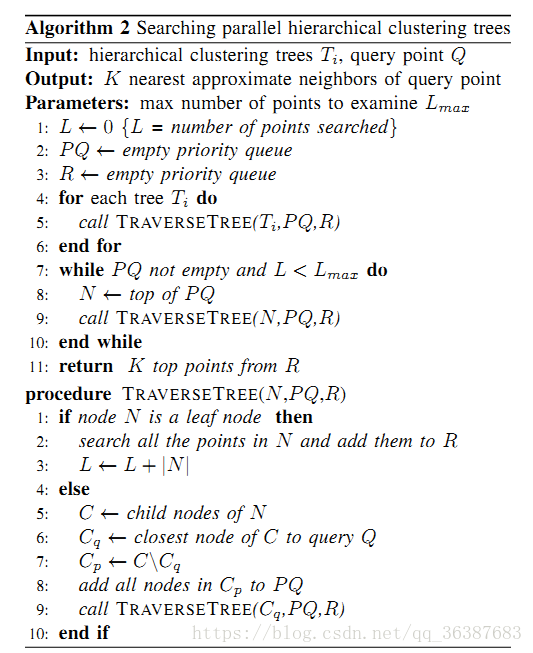
3 、层次聚类树 (The Hierarchical ClusteringTree)
层次聚类树采用k-medoids的聚类方法,而不是k-means。即它的聚类中心总是输入数据的某个点,但是在本算法中,并没有像k-medoids聚类算法那样去最小化方差求聚类中心,而是直接从输入数据中随机选取聚类中心点,这样的方法在建立树时更加简单有效,同时又保持多棵树之间的独立性。
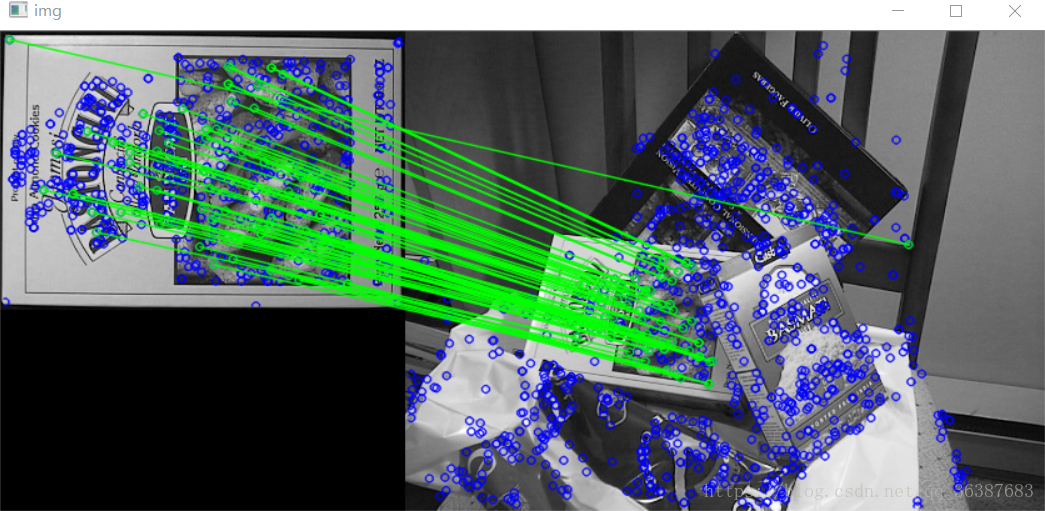
index_params=dict(algorithm = FLANN_INDEX_KDTREE,trees=5)
import cv2 as cv import numpy as np from matplotlib import pyplot as plt img1 = cv.imread('img/box.png', 0) img2 = cv.imread('img/box_in_scene.png', 0) def sift_flann_demo(): sift = cv.xfeatures2d.SIFT_create() kp1, des1 = sift.detectAndCompute(img1, None) kp2, des2 = sift.detectAndCompute(img2, None) #指定算法 FLANN_INDEX_KDTREE = 0 index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5) search_params = dict(checks = 50) #指定递归次数 flann = cv.FlannBasedMatcher(index_params, search_params) matches = flann.knnMatch(des1, des2, k=2) # Need to draw only good matches, so create a mask matchesMask = [[0, 0] for i in range(len(matches))] # ratio test as per Lowe's paper for i,(m, n) in enumerate(matches): if m.distance < 0.7 * n.distance: matchesMask[i] = [1, 0] draw_params = dict(matchColor = (0, 255, 0), singlePointColor = (255, 0, 0), matchesMask = matchesMask, flags = 0) img3 = cv.drawMatchesKnn(img1, kp1, img2, kp2, matches, None, **draw_params) cv.namedWindow('img',cv.WINDOW_AUTOSIZE) cv.imshow('img',img3) sift_flann_demo() cv.waitKey(0) cv.destroyAllWindows()














 262
262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









