







网上好多教程都是MPU6050的,看到有些网友说其实两款传感器读写都差不多,但是对于我这种小小白,只想先用例程上手,读出数据,其他的再慢慢来。
这里提供了一种简单上手的方法:
【MPU6500文档】:
链接:https://pan.baidu.com/s/1-fA5Kqf1M4Ami8VPBi0KAw?pwd=MPU6
提取码:MPU6
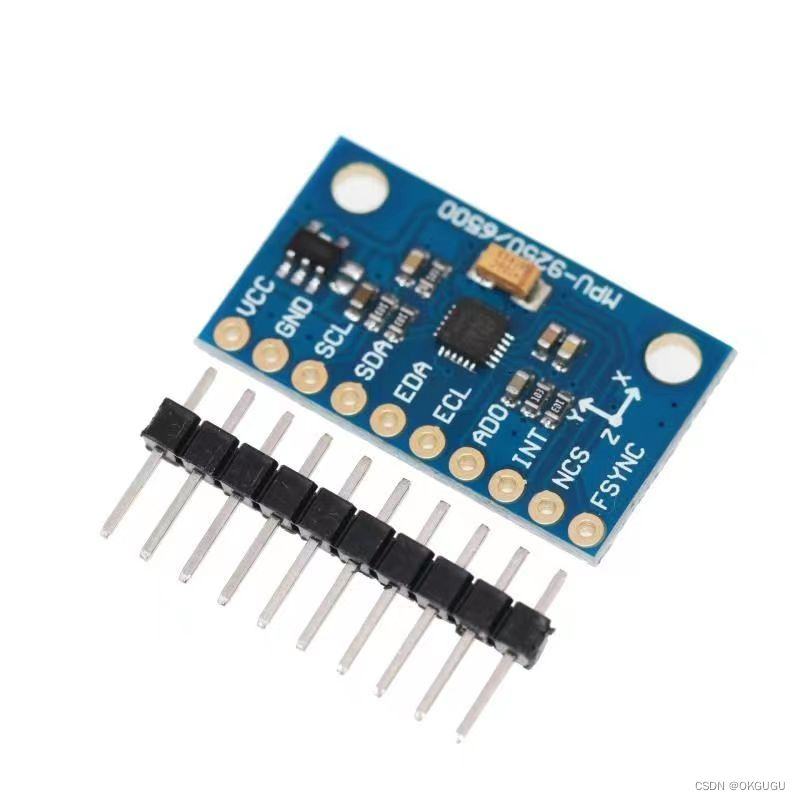
MPU-6500模块(三轴陀螺仪 + 三轴加速度)
模块型号 GY-6500 使用芯片 MPU-6500 供电电源 3-5v(内部低压差稳压) 通信方式 标准IIC/SPI通信协议 芯片内置16bit AD转换器,16位数据输出 陀螺仪范围 ±250 500 1000 2000 °/s 加速度范围 ±2±4±8±16g 采用沉金PCB,机器焊接工艺保证质量 引脚间距 2.54mm
【步骤】
0、接线(IIC)
其中SDA和SLK引脚可以指定为ESP的其他GPIO脚,使用Wire.begin(SDA_PIN,SLK_PIN)来指定相应的IO口为IIC引脚。见后述代码
| 合宙ESP32C3 | MPU6500 |
| VCC(3.3V) | VCC |
| GND | GND |
| SDA(GPIO4) | SDA |
| SLK(GPIO5) | SLK |
文件:
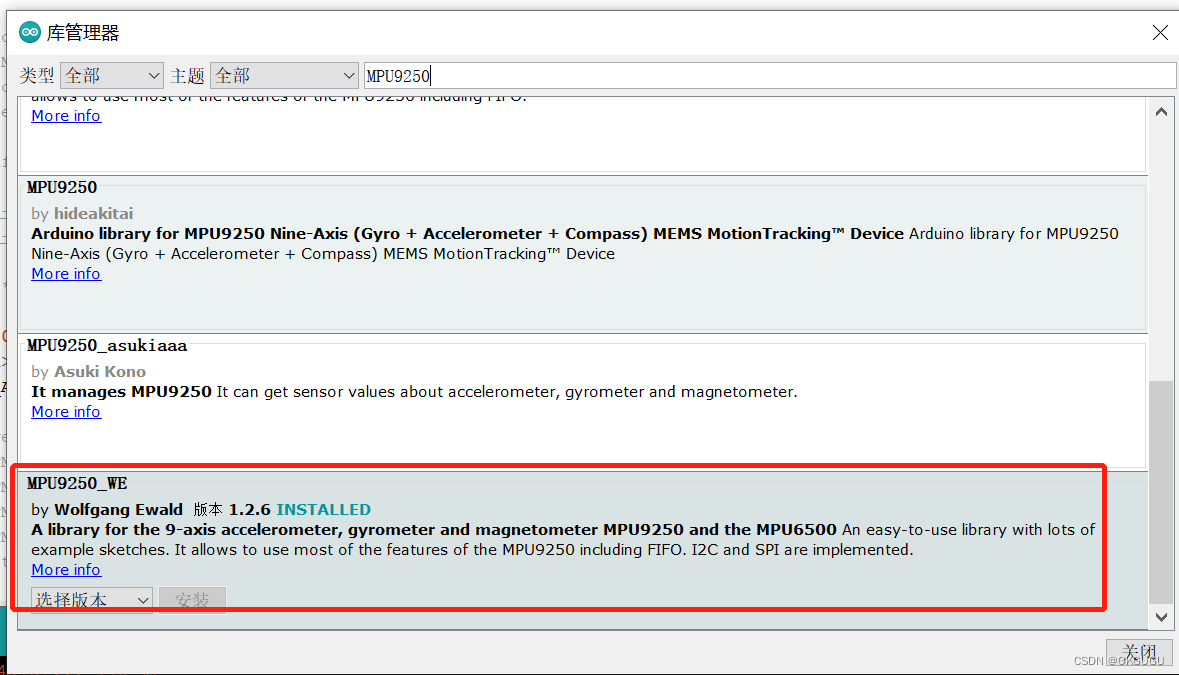
1、添加库
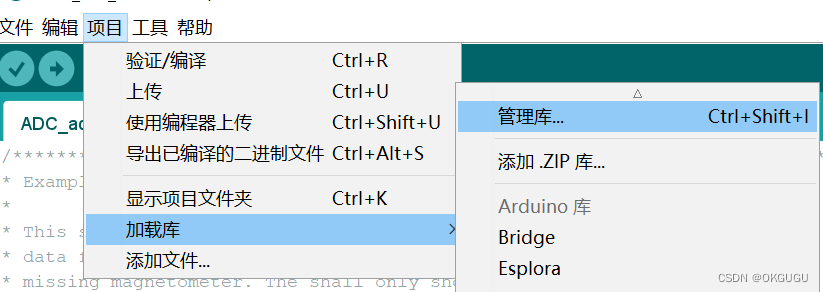
搜索MPU9250,找到“MPU9250_WE”并安装
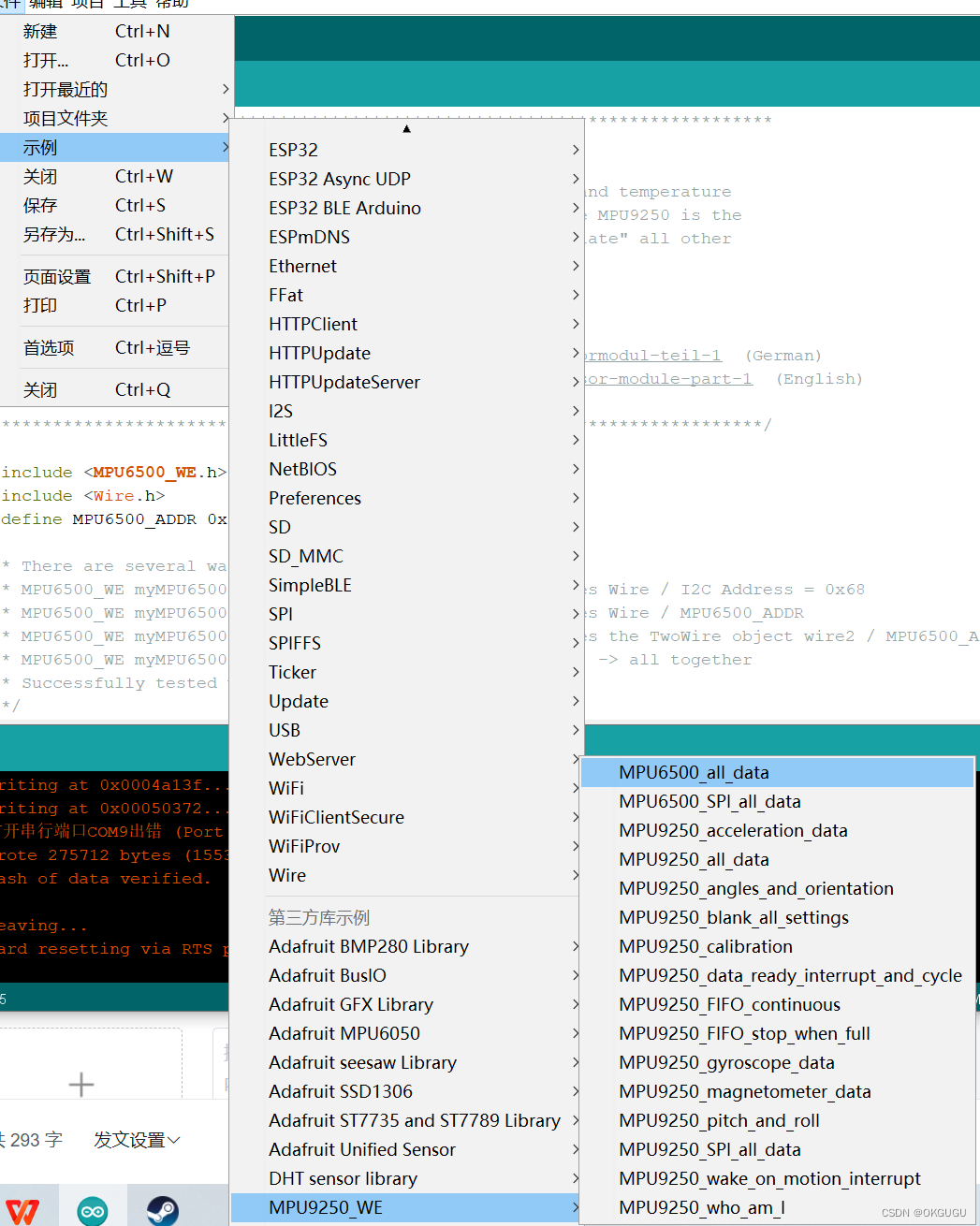
2、打开示例代码
3、在setup()函数中添加
Wire.begin(4,5); //将GPIO4作为SDA,将GPIO5作为SLK完整示例代码如下:(注意MPU6500_ADDR地址为0x68)
/***************************************************************************
* Example sketch for the MPU6500_WE library
*
* This sketch shows how to get acceleration, gyroscocope and temperature
* data from the MPU6500. In essence, the difference to the MPU9250 is the
* missing magnetometer. The shall only show how to "translate" all other
* MPU9250 example sketches for use of the MPU6500
*
* For further information visit my blog:
*
* https://wolles-elektronikkiste.de/mpu9250-9-achsen-sensormodul-teil-1 (German)
* https://wolles-elektronikkiste.de/en/mpu9250-9-axis-sensor-module-part-1 (English)
*
***************************************************************************/
#include <MPU6500_WE.h>
#include <Wire.h>
#define MPU6500_ADDR 0x68
/* There are several ways to create your MPU6500 object:
* MPU6500_WE myMPU6500 = MPU6500_WE() -> uses Wire / I2C Address = 0x68
* MPU6500_WE myMPU6500 = MPU6500_WE(MPU6500_ADDR) -> uses Wire / MPU6500_ADDR
* MPU6500_WE myMPU6500 = MPU6500_WE(&wire2) -> uses the TwoWire object wire2 / MPU6500_ADDR
* MPU6500_WE myMPU6500 = MPU6500_WE(&wire2, MPU6500_ADDR) -> all together
* Successfully tested with two I2C busses on an ESP32
*/
MPU6500_WE myMPU6500 = MPU6500_WE(MPU6500_ADDR);
void setup() {
Serial.begin(115200);
Wire.begin(4,5);
if(!myMPU6500.init()){
Serial.println("MPU6500 does not respond");
}
else{
Serial.println("MPU6500 is connected");
}
/* The slope of the curve of acceleration vs measured values fits quite well to the theoretical
* values, e.g. 16384 units/g in the +/- 2g range. But the starting point, if you position the
* MPU6500 flat, is not necessarily 0g/0g/1g for x/y/z. The autoOffset function measures offset
* values. It assumes your MPU6500 is positioned flat with its x,y-plane. The more you deviate
* from this, the less accurate will be your results.
* The function also measures the offset of the gyroscope data. The gyroscope offset does not
* depend on the positioning.
* This function needs to be called at the beginning since it can overwrite your settings!
*/
Serial.println("Position you MPU6500 flat and don't move it - calibrating...");
delay(1000);
myMPU6500.autoOffsets();
Serial.println("Done!");
/* This is a more accurate method for calibration. You have to determine the minimum and maximum
* raw acceleration values of the axes determined in the range +/- 2 g.
* You call the function as follows: setAccOffsets(xMin,xMax,yMin,yMax,zMin,zMax);
* Use either autoOffset or setAccOffsets, not both.
*/
//myMPU6500.setAccOffsets(-14240.0, 18220.0, -17280.0, 15590.0, -20930.0, 12080.0);
/* The gyroscope data is not zero, even if you don't move the MPU6500.
* To start at zero, you can apply offset values. These are the gyroscope raw values you obtain
* using the +/- 250 degrees/s range.
* Use either autoOffset or setGyrOffsets, not both.
*/
//myMPU6500.setGyrOffsets(45.0, 145.0, -105.0);
/* You can enable or disable the digital low pass filter (DLPF). If you disable the DLPF, you
* need to select the bandwdith, which can be either 8800 or 3600 Hz. 8800 Hz has a shorter delay,
* but higher noise level. If DLPF is disabled, the output rate is 32 kHz.
* MPU6500_BW_WO_DLPF_3600
* MPU6500_BW_WO_DLPF_8800
*/
myMPU6500.enableGyrDLPF();
//myMPU6500.disableGyrDLPF(MPU6500_BW_WO_DLPF_8800); // bandwdith without DLPF
/* Digital Low Pass Filter for the gyroscope must be enabled to choose the level.
* MPU6500_DPLF_0, MPU6500_DPLF_2, ...... MPU6500_DPLF_7
*
* DLPF Bandwidth [Hz] Delay [ms] Output Rate [kHz]
* 0 250 0.97 8
* 1 184 2.9 1
* 2 92 3.9 1
* 3 41 5.9 1
* 4 20 9.9 1
* 5 10 17.85 1
* 6 5 33.48 1
* 7 3600 0.17 8
*
* You achieve lowest noise using level 6
*/
myMPU6500.setGyrDLPF(MPU6500_DLPF_6);
/* Sample rate divider divides the output rate of the gyroscope and accelerometer.
* Sample rate = Internal sample rate / (1 + divider)
* It can only be applied if the corresponding DLPF is enabled and 0<DLPF<7!
* Divider is a number 0...255
*/
myMPU6500.setSampleRateDivider(5);
/* MPU6500_GYRO_RANGE_250 250 degrees per second (default)
* MPU6500_GYRO_RANGE_500 500 degrees per second
* MPU6500_GYRO_RANGE_1000 1000 degrees per second
* MPU6500_GYRO_RANGE_2000 2000 degrees per second
*/
myMPU6500.setGyrRange(MPU6500_GYRO_RANGE_250);
/* MPU6500_ACC_RANGE_2G 2 g (default)
* MPU6500_ACC_RANGE_4G 4 g
* MPU6500_ACC_RANGE_8G 8 g
* MPU6500_ACC_RANGE_16G 16 g
*/
myMPU6500.setAccRange(MPU6500_ACC_RANGE_2G);
/* Enable/disable the digital low pass filter for the accelerometer
* If disabled the bandwidth is 1.13 kHz, delay is 0.75 ms, output rate is 4 kHz
*/
myMPU6500.enableAccDLPF(true);
/* Digital low pass filter (DLPF) for the accelerometer, if enabled
* MPU6500_DPLF_0, MPU6500_DPLF_2, ...... MPU6500_DPLF_7
* DLPF Bandwidth [Hz] Delay [ms] Output rate [kHz]
* 0 460 1.94 1
* 1 184 5.80 1
* 2 92 7.80 1
* 3 41 11.80 1
* 4 20 19.80 1
* 5 10 35.70 1
* 6 5 66.96 1
* 7 460 1.94 1
*/
myMPU6500.setAccDLPF(MPU6500_DLPF_6);
/* You can enable or disable the axes for gyroscope and/or accelerometer measurements.
* By default all axes are enabled. Parameters are:
* MPU6500_ENABLE_XYZ //all axes are enabled (default)
* MPU6500_ENABLE_XY0 // X, Y enabled, Z disabled
* MPU6500_ENABLE_X0Z
* MPU6500_ENABLE_X00
* MPU6500_ENABLE_0YZ
* MPU6500_ENABLE_0Y0
* MPU6500_ENABLE_00Z
* MPU6500_ENABLE_000 // all axes disabled
*/
//myMPU6500.enableAccAxes(MPU6500_ENABLE_XYZ);
//myMPU6500.enableGyrAxes(MPU6500_ENABLE_XYZ);
delay(200);
}
void loop() {
xyzFloat gValue = myMPU6500.getGValues();
xyzFloat gyr = myMPU6500.getGyrValues();
float temp = myMPU6500.getTemperature();
float resultantG = myMPU6500.getResultantG(gValue);
Serial.print("Acceleration in g (x,y,z):");
Serial.print(gValue.x);
Serial.print(" ");
Serial.print(gValue.y);
Serial.print(" ");
Serial.print(gValue.z);
Serial.print("Resultant g: ");
Serial.println(resultantG);
Serial.print("Gyroscope data in degrees/s: ");
Serial.print(gyr.x);
Serial.print(" ");
Serial.print(gyr.y);
Serial.print(" ");
Serial.println(gyr.z);
Serial.print("Temperature in °C: ");
Serial.println(temp);
Serial.println("********************************************");
delay(1000);
}4、编译下载后,串口显示如下:
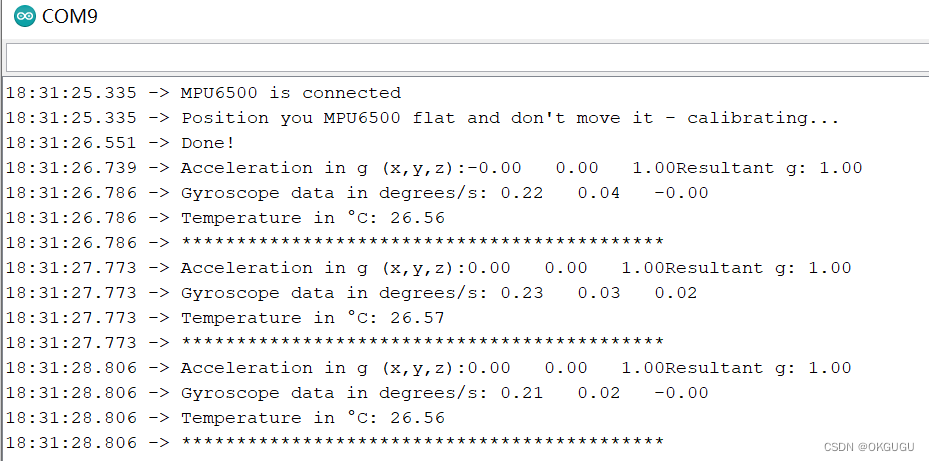
所有数据都能正常读取了,调用相关函数开发小功能还是可以的。有了数据显示,才有更大的动力探究更深的知识不是么,一开头就从寄存器来,怕是要劝退不少人,/苦笑

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









