







 本文介绍了o2o模式下的KDS系统,通过厨房制作系统和客显屏功能提高出餐效率,采用轮询和优先级算法优化厨师任务分配与菜品制作顺序,以减少厨房错误。
本文介绍了o2o模式下的KDS系统,通过厨房制作系统和客显屏功能提高出餐效率,采用轮询和优先级算法优化厨师任务分配与菜品制作顺序,以减少厨房错误。
一、系统介绍
o2o通过互联网连接本地生活,解决日常生活的衣实住行问题。kds系统是餐饮制作系统,其对后厨出餐进行流程化管理,提高出餐效率,并减少厨房丢单和漏单。
二、系统功能
kds系统包括厨房制作系统和客显屏两个部分。
制作系统包括分派订单给厨师制作、规划厨师制作顺序、订单制作状态同步。
客显屏系统包括排队、统计、叫号通知等功能。
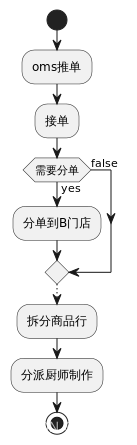
主流程
接单
三、系统设计
1.分派厨师制作算法
a.轮询分配厨师
b.选择目前最空闲的厨师
2.规划厨师制作菜品顺序算法
a、FCFS 先来先服务算法。 先进来的菜品先被厨师制作。
b、打分算法。评分高的菜品先被制作。
打分因素: 订单预计取餐时间、菜品制作时间、客户会员等级。

















 146
146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









