







记一次数字图像处理实验
实验要求:标记图中图形轮廓标记计数

实验环境:VisualStudio2019
实验步骤:
1. 搭建实验环境
详细操作流程看他的https://blog.csdn.net/qq_29519575/article/details/91398974
2. 编码
实例中用到的关键函数及参数介绍:
- cvtcolor():颜色空间转换函数,可以实现RGB颜色向HSV,HSI等颜色空间转换,也可以转换为灰度图。
void cv::cvtColor(
cv::InputArray src, // 输入序列
cv::OutputArray dst, // 输出序列
int code, // 颜色映射码
int dstCn = 0 // 用于指定目标图像的通道数,如果指定的值是默认值0,那么通道数将由输入图像和颜色转换码决定。
);- threshold(): 图像二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
double threshold(
InputArray src, // 输入数组,填单通道,8位或32位浮点类型Mat即可。即为输入图像。
OutputArray dst, // 函数运算后的结果存放在这。即为输出图像(与输入图像同样的尺寸和类型)。
double thresh, // 阈值的具体值,根据需要自行设置。
double maxval, // 表示预设最大值,使用THRESH_BINARY或THRESH_BINARY_INV类型。
int type // int类型的type,表示阈值化处理的类型。
);其中:阈值化类型
二进制阈值化 THRESH_BINARY
反二进制阈值化 THRESH_BINARY_INV
截断阈值化 THRESH_TRUNC
阈值化为零 THRESH_TOZERO
反阈值化为零 THRESH_TOZERO_INV
OTSU阈值化 CV_THRESH_OTSU
- findContours():在二值化图像中查找轮廓,该函数使用@CITE Suzuki 85算法从二进制图像中检索轮廓;
void findContours(
InputArray image, // 原图像,一般为8位单通道的图像;非零像素为1,0像素为0,即输入图像是一个二值化的图像;可以用compare, inRange, threshold , adaptiveThreshold, Canny,以及其他的方法将一个灰度图像或者彩色图像转换为二值化的图像;如果函数的参数mode是RETR_CCOMP 或者RETR_FLOODFILL,输入图像可以是32位整型图像(CV_32SC1)。
OutputArrayOfArrays contours, // 检测得到的轮廓,每一个轮廓存储在一个vector类型的点集中。
//OutputArray hierarchy, // 可选的输出矢量,例如std::vector<cv::Vec4i>,包含图像的拓扑信息,数量与轮廓的个数一样,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~ hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,该值设置为-1。
int mode, // 轮廓的检索模式
int method, // 轮廓的近似方法
Point offset = Point() // 可选的变量,每个轮廓被偏移的偏移量
);其中:int mode(轮廓检索模式):
RETR_EXTERNAL
RETR_LIST
RETR_CCOMP
RETR_TREE
RETR_FLOODFILL
int method(轮廓的近似方法):
CHAIN_APPROX_NONE
CHAIN_APPROX_SIMPLE
CHAIN_APPROX_TC89_L1
- cvCircle():绘制圆形函数
cvCircle(
CvArr* img, // 源图像指针
CvPoint center, // 画圆的圆心坐标
int radius, // 圆的半径
CvScalar color, // 圆的颜色,B(蓝)G(绿)R(红)
int thickness=1, // 如果是正数,表示组成圆的线条的粗细程度,否则,表示圆是否被填充。
int lineType=8, // 线条的类型,默认是8
int shift=0 // 线条的类型,默认是8
);
实验代码清单:
#----------------------------【Specification】----------------------------
# Coding: UTF-8
# 程序名称:【Opencv查找地图圆形轮廓、标记、分离】
# IDE:Visual Studio 2019
# Python版本:3.7
# OpenCV版本:3.4.3.18
# 2019年12月3日 CREATED BY 一箭双雕
#-------------------------------------------------------------------------
import cv2
import matplotlib.pyplot as plt
import copy
class Processor(object):
def __init__(self, image_full_path):
self._image_full_path = image_full_path
def run(self):
image = cv2.imread(self._image_full_path, cv2.IMREAD_COLOR)
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
ret, mask = cv2.threshold(gray_image, 160, 255, cv2.THRESH_BINARY)
binary, contours, hierarchy = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
segmentation = copy.deepcopy(image)
segmentation *= 0
roi = list()
for i, contour in enumerate(contours):
area = cv2.contourArea(contour)
if area < 16:
continue
(x, y), radius = cv2.minEnclosingCircle(contour)
if radius > 16 or (143 < x < 181 and 189 < y < 300) or (x > 318 and y > 187):
continue
roi.append(contour)
image = cv2.circle(image, (int(x), int(y)), int(radius), (255, 0, 0), 2)
segmentation = cv2.circle(segmentation, (int(x), int(y)), int(radius), (255, 255, 255), -1)
plt.figure(1)
plt.imshow(image)
plt.show()
plt.figure(2)
plt.imshow(segmentation)
plt.show()
if __name__ == '__main__':
processor = Processor('./test.jpg')
processor.run()
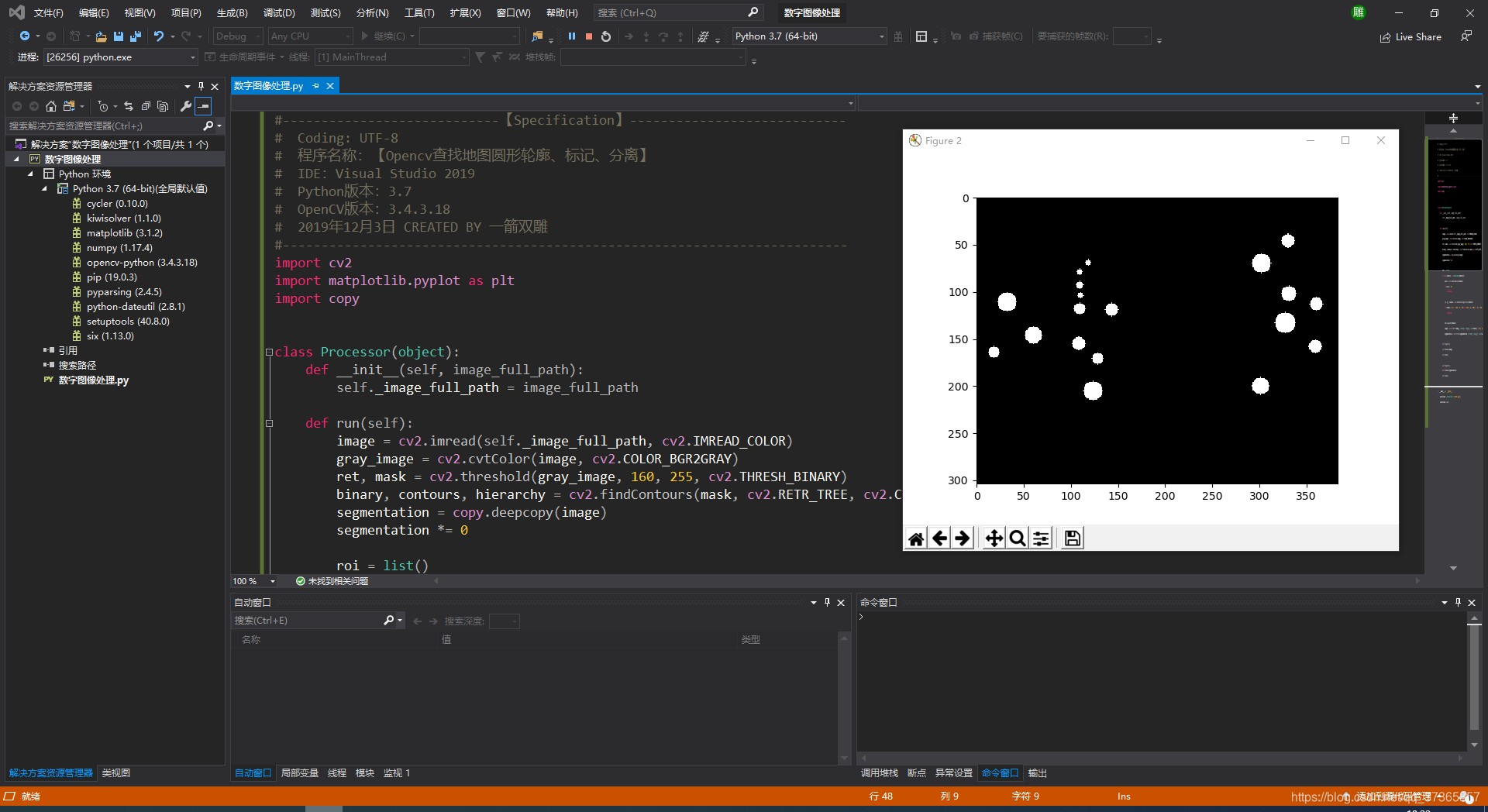
3. 调试&运行
运行效果图 :

4. 上传源文件至GitHub
本次实验源文件及所用图片提供下载:https://github.com/yijianshuangdiao/shuzituxiangchuli
实验心得:
把FAST的rap唱给我听 我就帮你写心得!















 22万+
22万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









