







 本文详细解释了坐标系在导航中的应用,包括位置信息如何通过空间直角坐标系和经纬高坐标系量化,运动信息涉及速度和加速度的测量方法,以及姿态信息的描述,如欧拉角。重点介绍了导航坐标系的选择和使用,以及坐标系转换的重要性。
本文详细解释了坐标系在导航中的应用,包括位置信息如何通过空间直角坐标系和经纬高坐标系量化,运动信息涉及速度和加速度的测量方法,以及姿态信息的描述,如欧拉角。重点介绍了导航坐标系的选择和使用,以及坐标系转换的重要性。
什么是坐标系
这个根据gpt的介绍——坐标系是一种用于描述和定位空间中点位置的系统。它是由一组坐标轴和原点组成的,其中坐标轴是直线或曲线,而原点则是坐标轴的交点。
这个相信都知道,不再阐述基本的理念。现在以导航的目的为思路进行展开介绍,并引出不同的坐标系。
导航目的
那么,导航的目的是什么呢?以目前我的拙见我认为是:
让设备自己知道自己在哪(位置信息),在做什么运动(速度及加速度信息),自身的姿态(航向及姿态角)。
那么要量化这些信息,首先肯定是需要一个参考系的,这个参考系可以是地球,也可以是房间内某一个点。
位置信息
现在我们引入坐标系,先从位置信息入手,暂且不管运动信息和姿态信息。
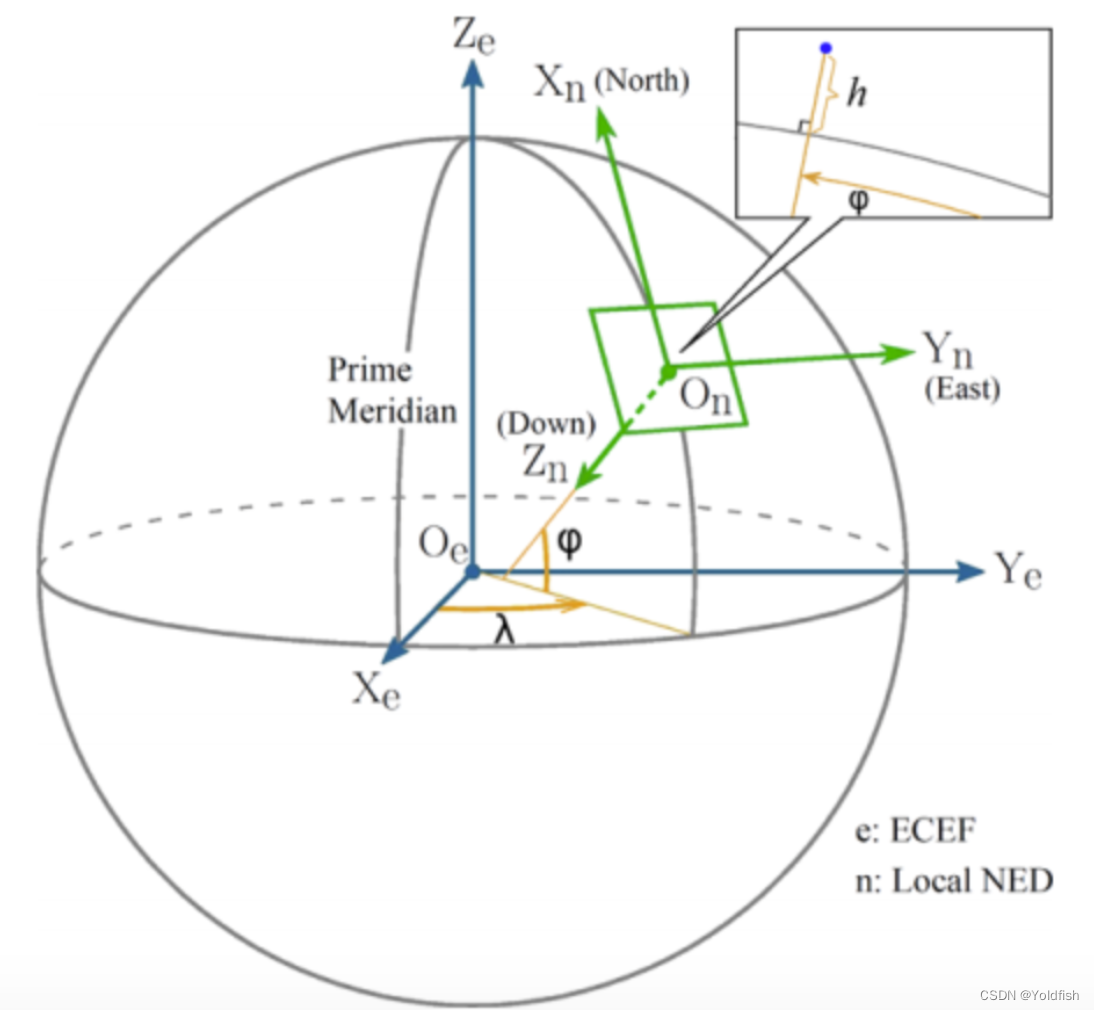
我们最熟悉的空间直角坐标系(也叫笛卡尔坐标系,往往是右手坐标系)。我们知道,当确定好了坐标系的原点后(其实也就选好了参考系),那么空间中任意一点的位置信息就都可表示出来,也就是相对原点的距离信息。
显然,只要选好了一个参考坐标系后,位置信息就可以确认了(至于怎么确认先不管,至少已经知道位置信息可以量化出来)。
那么该怎么选取这个参考点,以此建立坐标系呢?
如果是小范围的移动,比如扫地机器人,它只需要在房间内移动就可以。是否只需要在扫地机器人的home点(也就是充电桩的位置)设为坐标系的原点,然后使x轴朝向一个固定方向(比如北),xy平面水平(想必居民房都是水平的),右手坐标系确定好z轴,这样一来参考坐标系就建立好了。可以想象得到,现在房间内任意一点地位置信息都可
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











