







文章目录
简介
最近学习EKF,在看到四元数的坐标转换时碰到点疑问,最后慢慢也弄明白其使用方法,现做总结。
四元数使用中无非三种转换情况:
1、欧拉角 —— 四元数 之间互相转换;
2、旋转矩阵 —— 四元数 之间互相转换;
3、轴角 —— 四元数 之间互相转换,其中轴角转四元数用的最多。
PS:以下 N或e表示NED坐标系(N系), B或b表示Body机体坐标系(B系)
用法一:欧拉角——四元数
转换公式可以很容易查到,分为以下几种情况:
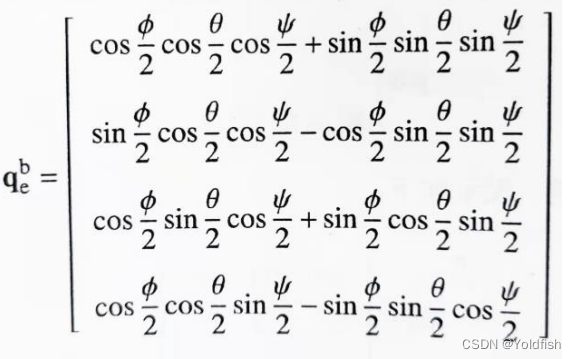
1、Euler2Quat:
最原始的公式
小角度假设前提下,无穷小化简后得到公式:
Euler2Quat = 【1 0.5*(roll,pitch,yaw)】
具体推到方法只要把sin(x)等价为x(二阶无穷小等价为0),cos(x)等价为1,就可以得到上述公式
2、Euler 2 Vect 2 Quat:
欧拉角旋转先转换为轴角,再由轴角转换为欧拉角,这种方式往往在不能小角度假设时使用,转换方式如下:
假设得到的转角为Euler = 【R , P,Y】,单位化得到旋转轴Vect,取向量的模得到旋转角θ,再通过下面的公式得到四元数:
Quat = 【cos(θ/2) Vect * sin(θ/2)】
注意代入的角度是θ/2,可以看出,如果使用小角度假设,等价无穷小后就和Euler2Quat = 【1 0.5*(roll,pitch,yaw)】这个公式相同了。
个人认为Euler 2 Vect 2 Quat这种方式可以用在IMU数据读取频率小的时候,得到的Δ角度比较大。
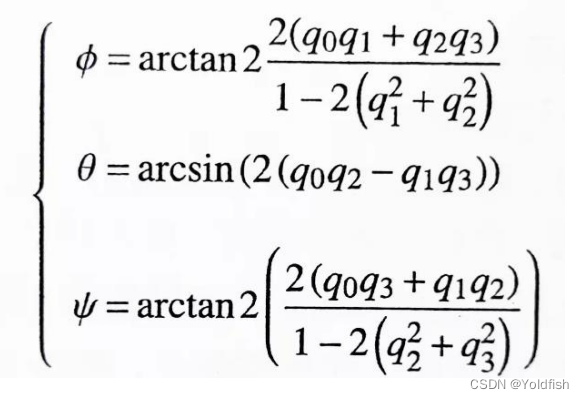
3、Quat 2 Euler:
这种方式往往就是需要从估计器中读取姿态角时需要的了,转换公式如下:
用法二:旋转矩阵——四元数
最开始,一直想不通为什么要用这么多种姿态表示方式,一直用四元数不就得了。后来发现,在进行同一向量在两个坐标系(N系和B系)间转换时,如果采用四元数计算,好像计算复杂度比旋转矩阵还要高,而且还需要把三维的向量在第一位补零成四维才可以进行计算,那不如就先转换成旋转矩阵,然后用旋转矩阵去乘。
1、Quat 2 R
因此最常用的转换是四元数 转 旋转矩阵,过程如下:
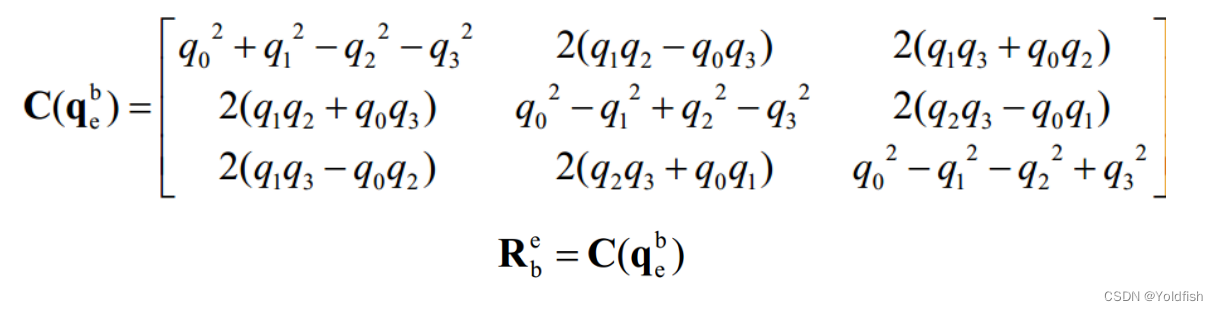
特别注意:可以看到,旋转矩阵R的上下角标和四元数q是相反的,这是因为
表示的是坐标系的旋转,也就是把e系旋转到b系,而biaoshi 表示的是向量的旋转,也即把一个在B系下表示的向量转换到在e系下表示。这也就是转换后上下角标要反过来了。
表示的是向量的旋转,也即把一个在B系下表示的向量转换到在e系下表示。这也就是转换后上下角标要反过来了。
2、R 2 Quat
说实话到现在好像还没见过那个地方有这个转换,好像不是很常用,公式如下:
假设R为:
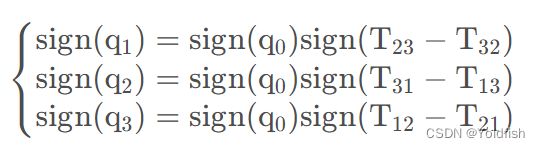
则四元数为:
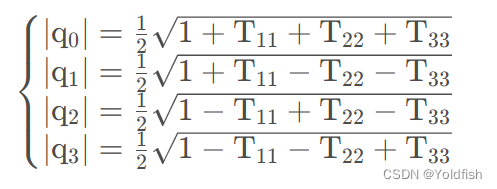
Q的符号确定如下:
用法三:轴角 —— 四元数
这个转换可能是最常用的一种,但是尤其需要区别出,这个轴角表示的是旋转了向量,还是旋转了坐标系
旋转坐标系Vect 2 Quat:
这种方式其实就是和上面“用法一”提到的Euler 2 Vect 2 Quat内容相同。就不再多赘述了。
旋转向量Vect 2 Quat:
这种方式用的最多的应该就是求姿态误差了,也是用的最多的一种。
举例如下:
在控制飞机自稳时,我们往往会优先保证飞机roll和pitch角为0,这个时候也就是加速度计为【0,0,n】的时候,这可以看成一个目标向量。
假设当前的加速度计数值为【a , b , c】,这就是当前的向量。
其实这两个向量的方向是相同的(如果飞机处于匀速或静止状态)。数值不同是同一个向量在不同坐标系下表示的结果。
【0,0,n】显然是N系坐标系下的表示,【a , b , c】是B系下的表示,如果把【a , b , c】的数值放到N系上,就有了两个方向不同的向量,其中【a,b,c】是倾斜的与NED的D方向有一定的夹角,这个夹角的值β = arctan(Ah ,-Az)
其中Ah = sqrt(a^2 + b^2), Az= c
有了这两个向量,我们可以找出怎么把向量【a,b,c】旋转到【0,0,n】,得到这个旋转,我们就能知道怎么把飞机旋转到水平位置了。现在我们已经知道旋转角了,其实就是β = arctan(Ah ,-Az),而旋转轴只需要通过向量的叉乘【a,b,c】x【0,0,n】便可以得到。
现在我们有了旋转轴和旋转角,也就是轴角,就可以通过公式**Quat = 【cos(θ/2) Vect * sin(θ/2)】**得到这个旋转的四元数。
好了,这里注意,这个四元数表示的是怎样的坐标系旋转呢?
根据上面提到的,现在旋转的是向量。我们是将倾斜向量旋转到与NED的D方向重合,使飞机水平。
那么得到的四元数表示的坐标系旋转就应为,把水平坐标系旋转到倾斜的坐标系。
因此,通过这种方式求误差角时,要格外注意四元数所表示的是坐标系从哪到哪的旋转
Quat 2 Vect:
目前为止,好像这种转换用的也少,也是需要格外注意以下,得到的转换后得到的轴角是旋转坐标系还是向量,不能搞反了。
转换公式可以通过Quat 2 Euler 2 Vect获得。
总结
1、四元数与欧拉角的转换较为简单,一般都表示坐标系的旋转;
2、旋转矩阵与四元数转换时,需要交换上下角标;
3、轴角与四元数的转换要格外注意轴角是用来旋转的向量还是坐标系,如果是坐标系则跟1相同,如果是向量则跟2相同。
好了,这些乱七八糟的姿态表示和旋转求误差什么的总算理清楚了
















 1556
1556











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











