<think>嗯,我现在要详细了解一下深度学习中的各种归一化方法及其原理。用户需要理解底层原理和具体实现,所以我得先回忆一下常见的归一化技术,比如批归一化(Batch Normalization)、层归一化(Layer Normalization)、实例归一化(Instance Normalization)、组归一化(Group Normalization)等等。可能还有其他的,比如权重归一化或者谱归一化,不过这些可能不是同一类的,需要区分清楚。
首先,批归一化(BN)应该是最经典的。我记得BN是在训练过程中对每个小批量数据进行归一化,也就是对每个神经元的输入进行标准化,使其均值0,方差1,然后通过可学习的参数缩放和平移。这样做的好处是可以减少内部协变量偏移,加速训练,允许更大的学习率,还有一定的正则化效果。不过具体实现的时候,BN在训练和测试阶段是不一样的,测试阶段使用的是移动平均的均值和方差。这部分需要详细解释。
然后是层归一化(LN),它跟BN不同,是针对单个样本的所有神经元进行归一化。也就是说,在同一个层内,对同一个样本的所有激活值计算均值和方差,然后应用缩放和偏移。LN不依赖于批量大小,所以在小批量或者动态批量情况下表现更好,比如在RNN中常用。不过它的原理和BN有什么本质区别呢?可能是在归一化的维度上不同,BN是在批处理和其他维度(比如通道、高、宽)上进行归一化,而LN是在通道、高、宽之外的维度,比如特征维度?
接下来是实例归一化(IN),它主要用于生成对抗网络或者风格迁移任务。IN是对每个样本的每个通道单独进行归一化,也就是在(H,W)维度上计算均值和方差。这样做的目的是保持每个实例的独立性,可能有助于保留实例的样式信息。比如在风格迁移中,保留内容的结构但改变风格,IN可以更好地规范化每个样本的样式。
组归一化(GN)则是将通道分成若干组,对每个样本的每个组进行归一化。GN在批量较小时效果比BN好,因为BN在批量很小时性能下降,而GN不依赖批量大小。例如在目标检测或视频处理中,可能因为内存限制只能使用小批量,这时候GN更合适。组归一化的分组策略如何影响性能呢?可能更多的组数让归一化更细致,但计算量也会增加。
另外,还有权重归一化(Weight Normalization)和谱归一化(Spectral Normalization)。权重归一化是通过对权重向量进行重参数化,将其分解为方向和幅度,这样可以加速训练收敛。谱归一化则主要用于GAN中,通过约束权重矩阵的谱范数来稳定训练,防止判别器过强。不过用户可能更关注的是输入或激活的归一化,所以可能需要先重点讲前面几种。
现在需要理清楚这些归一化方法各自适用的场景、数学公式以及实现方式。比如BN的公式是对每个通道在N、H、W维度上计算均值和方差,而LN是在C、H、W维度上。需要明确各个方法在张量上的操作维度。
对于具体实现,每个归一化方法在框架中的实现可能不同,但大体步骤都是计算统计量,归一化,然后缩放和平移。例如在PyTorch中,这些归一化层都有对应的实现,如torch.nn.BatchNorm2d、LayerNorm等,它们的参数和输入形状有关。
可能还需要比较不同归一化的优缺点。比如BN的问题在于对批量大小的依赖,当批量很小时,估计的均值和方差不准确,影响效果。而LN、IN、GN则不受批量大小的影响。另外,BN在卷积网络中使用时,是按通道进行的,即每个通道有自己的均值和方差参数,而LN可能是在所有通道上计算统计量?
比如对于四维张量(N, C, H, W),BN是在每个通道上,对N、H、W这三个维度计算均值和方差,得到C个均值和方差。而LN则是在每个样本上,对C、H、W这三个维度计算均值和方差,得到N个均值和方差。这样LN的参数数量可能与BN不同,比如缩放参数如果是每个通道的话,BN的缩放参数是C个,而LN可能也是C个?或者LN的缩放参数是针对整个层的特征?
可能这里需要更仔细的数学公式来区分。例如,对于BN,假设输入为x,形状是(N, C, H, W),那么对于每个通道c,计算该通道在所有样本、所有空间位置的均值μ_c和方差σ_c²。归一化后的x是 (x - μ_c)/sqrt(σ_c² + ε),然后乘以γ_c和β_c,每个通道有自己的γ和β。
而LN则是对每个样本n,计算该样本所有通道和空间位置的均值μ_n和方差σ_n²。归一化后的x是 (x - μ_n)/sqrt(σ_n² + ε),然后乘以γ和β。不过这里γ和β的维度可能与输入有关,比如如果LN应用于最后的特征维度,可能γ和β的长度是C*H*W?或者在图像处理中,如果使用LN,通常可能是在通道维度上进行归一化,比如对每个样本的每个通道的H和W进行归一化?或者可能LN在图像中的使用较少,而更多用于NLP中的Transformer,这时候特征维度是不同的。
这部分可能需要查阅资料确认。例如,在Transformer中,LN通常应用于每个样本的特征向量,即在最后一个维度上计算均值和方差。例如,输入的形状是(batch_size, seq_length, d_model),LN会在每个样本的每个位置上(即对d_model维度)计算均值和方差,所以对于每个位置的特征向量进行归一化。而在图像处理中,LN可能对每个样本的所有元素(C、H、W)计算均值和方差,即归一化的维度是CHW。这时候γ和β的参数数量是C*H*W,但这样可能参数过多,所以实际中可能LN在图像中的使用可能需要调整,或者有不同的实现方式。
可能用户提到的归一化方法主要是BN、LN、IN、GN,需要分别详细解释它们的数学原理、操作维度、适用场景、具体实现以及优缺点。此外,可能还需要提到它们如何影响梯度流,为什么能加速训练,以及正则化效果是如何产生的(比如BN在训练时由于小批量的噪声带来的随机性,类似于Dropout的效果)。
在具体实现上,比如在PyTorch中,BN的实现会维护一个running_mean和running_var,通过动量更新,而训练和测试时的模式不同。其他归一化方法可能不需要维护全局统计量,比如LN、IN、GN在测试时和训练时的计算方式相同,因为它们不依赖于批量统计。
另外,可能需要注意归一化的位置,比如是在激活函数之前还是之后。通常BN是在卷积层之后、激活函数之前应用,但有些研究也探讨不同的位置带来的影响。
总结起来,我需要分步骤介绍每个归一化方法,包括:
1. 方法名称(如批归一化)
2. 提出背景(解决什么问题)
3. 数学公式及操作维度
4. 训练和测试阶段的差异(如有)
5. 具体实现方式(如参数数量,在框架中的使用)
6. 优缺点及适用场景
这样用户能逐步理解各个归一化的原理和应用。同时,需要确保公式的格式正确,使用$$...$$和$...$,并且用中文清晰解释。</think>以下是深度学习中的主要归一化方法及其原理的详细说明,按结构分层解析:
---
### 一、批归一化(Batch Normalization, BN)
#### 1. **提出背景**
- 解决**内部协变量偏移**(每层输入分布随训练变化),加速训练并允许更大的学习率。
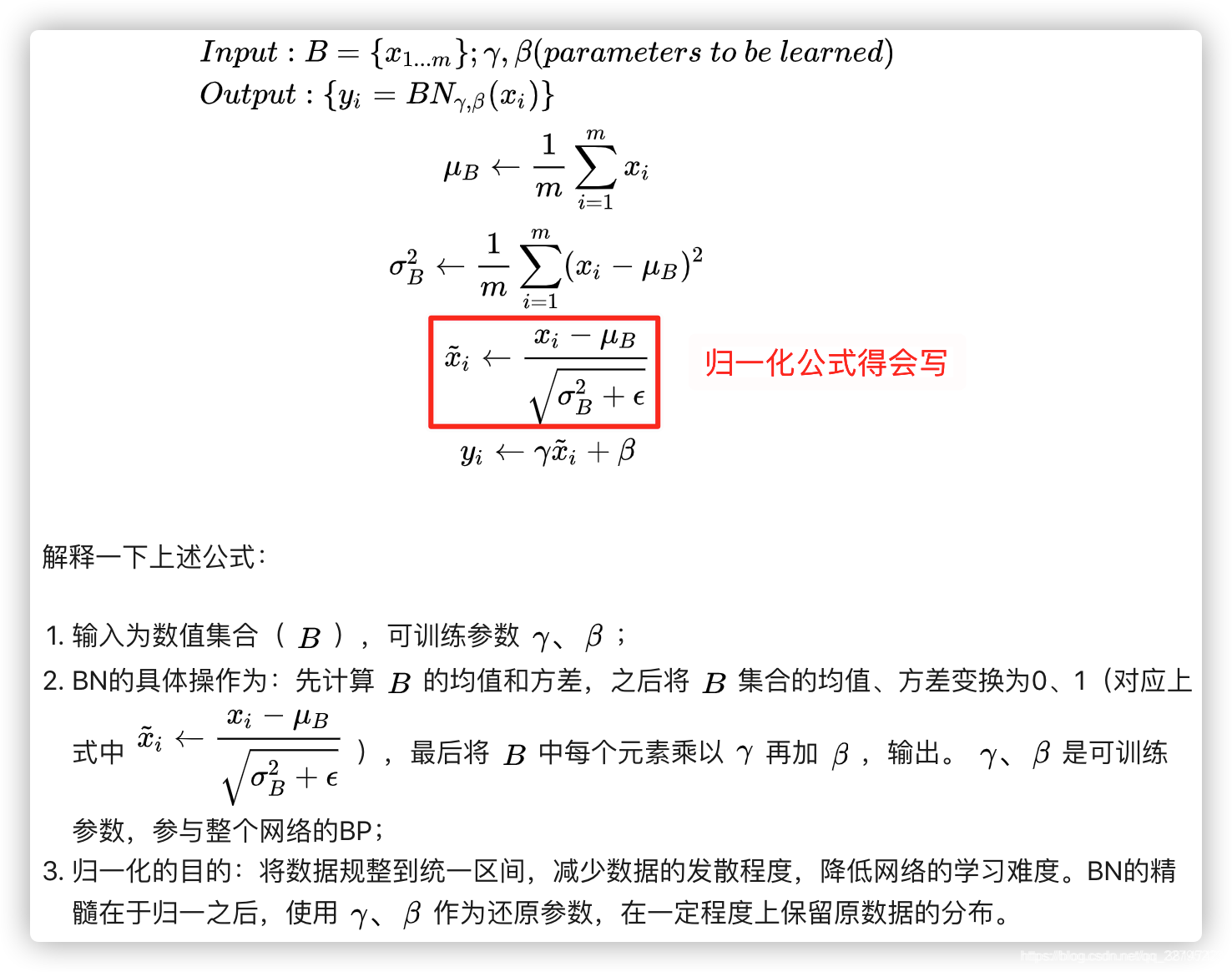
#### 2. **数学原理**
- 对每个**通道**的输入进行归一化(针对卷积网络):
$$ \mu_c = \frac{1}{NHW}\sum_{n=1}^N \sum_{h=1}^H \sum_{w=1}^W x_{n,c,h,w} $$
$$ \sigma_c^2 = \frac{1}{NHW}\sum_{n=1}^N \sum_{h=1}^H \sum_{w=1}^W (x_{n,c,h,w} - \mu_c)^2 $$
$$ \hat{x}_{n,c,h,w} = \frac{x_{n,c,h,w} - \mu_c}{\sqrt{\sigma_c^2 + \epsilon}} $$
$$ y_{n,c,h,w} = \gamma_c \hat{x}_{n,c,h,w} + \beta_c $$
- $\gamma_c$和$\beta_c$为可学习的缩放和偏移参数。
#### 3. **实现细节**
- **训练阶段**:计算当前批量的均值和方差。
- **测试阶段**:使用训练时累积的移动平均统计量。
- **参数数量**:每通道一对$\gamma$和$\beta$,共$2C$个参数。
#### 4. **优缺点**
- **优点**:加速训练、缓解梯度消失/爆炸、轻微正则化。
- **缺点**:依赖批量大小(小批量效果差),不适用于动态网络(如RNN)。
---
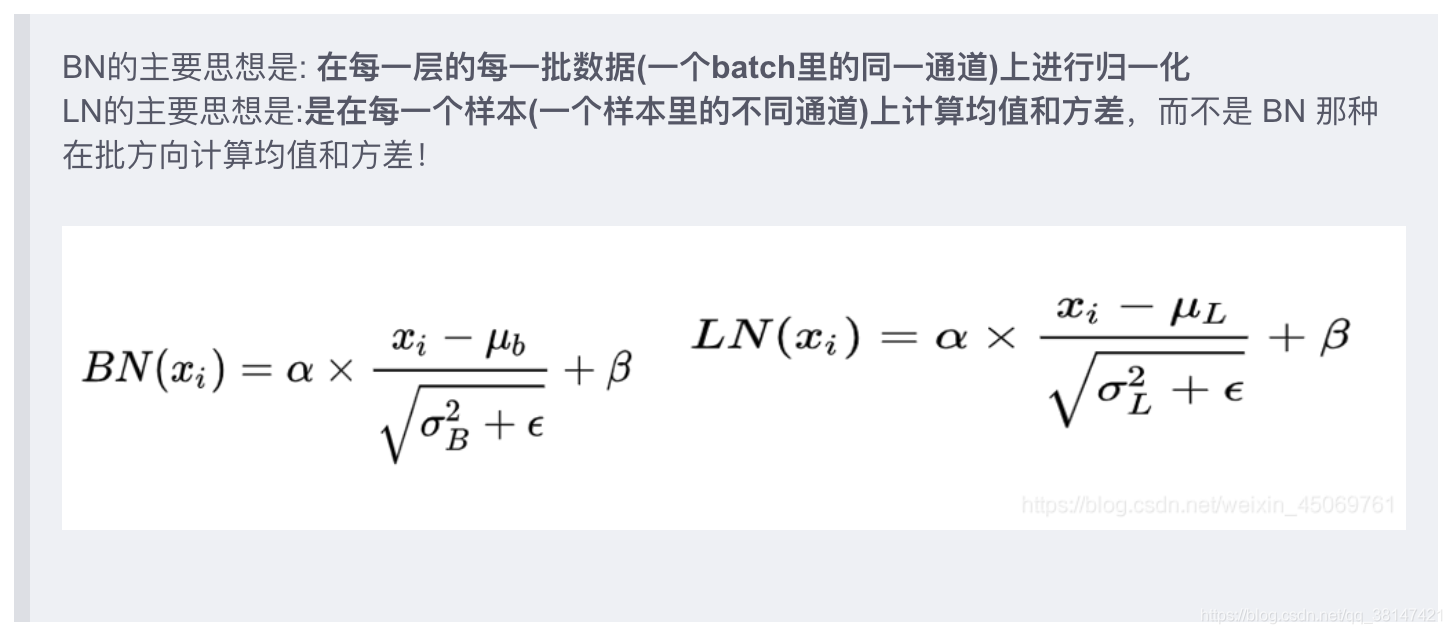
### 二、层归一化(Layer Normalization, LN)
#### 1. **提出背景**
- 解决BN对批量大小的依赖,适用于RNN和Transformer。
#### 2. **数学原理**
- 对每个**样本**的所有特征进行归一化:
$$ \mu_n = \frac{1}{CHW}\sum_{c=1}^C \sum_{h=1}^H \sum_{w=1}^W x_{n,c,h,w} $$
$$ \sigma_n^2 = \frac{1}{CHW}\sum_{c=1}^C \sum_{h=1}^H \sum_{w=1}^W (x_{n,c,h,w} - \mu_n)^2 $$
$$ \hat{x}_{n,c,h,w} = \frac{x_{n,c,h,w} - \mu_n}{\sqrt{\sigma_n^2 + \epsilon}} $$
$$ y_{n,c,h,w} = \gamma \hat{x}_{n,c,h,w} + \beta $$
- $\gamma$和$\beta$为整个层的参数。
#### 3. **实现细节**
- 训练和测试逻辑一致,无需存储统计量。
- **参数数量**:每层一对$\gamma$和$\beta$,共2个参数。
#### 4. **优缺点**
- **优点**:独立于批量大小,适合序列模型。
- **缺点**:对卷积网络效果弱于BN。
---
### 三、实例归一化(Instance Normalization, IN)
#### 1. **提出背景**
- 用于图像生成任务(如风格迁移),保持实例间独立性。
#### 2. **数学原理**
- 对每个**样本的每个通道**单独归一化:
$$ \mu_{n,c} = \frac{1}{HW}\sum_{h=1}^H \sum_{w=1}^W x_{n,c,h,w} $$
$$ \sigma_{n,c}^2 = \frac{1}{HW}\sum_{h=1}^H \sum_{w=1}^W (x_{n,c,h,w} - \mu_{n,c})^2 $$
$$ \hat{x}_{n,c,h,w} = \frac{x_{n,c,h,w} - \mu_{n,c}}{\sqrt{\sigma_{n,c}^2 + \epsilon}} $$
$$ y_{n,c,h,w} = \gamma_c \hat{x}_{n,c,h,w} + \beta_c $$
#### 3. **实现细节**
- 参数数量与BN相同($2C$个参数)。
#### 4. **优缺点**
- **优点**:保留实例的样式信息。
- **缺点**:不适用于分类任务。
---
### 四、组归一化(Group Normalization, GN)
#### 1. **提出背景**
- 在小批量场景下替代BN(如目标检测)。
#### 2. **数学原理**
- 将通道分为$G$组,每组单独归一化:
$$ \mu_{n,g} = \frac{1}{(C/G)HW}\sum_{c \in g} \sum_{h=1}^H \sum_{w=1}^W x_{n,c,h,w} $$
$$ \sigma_{n,g}^2 = \frac{1}{(C/G)HW}\sum_{c \in g} \sum_{h=1}^H \sum_{w=1}^W (x_{n,c,h,w} - \mu_{n,g})^2 $$
$$ \hat{x}_{n,c,h,w} = \frac{x_{n,c,h,w} - \mu_{n,g}}{\sqrt{\sigma_{n,g}^2 + \epsilon}} $$
$$ y_{n,c,h,w} = \gamma_c \hat{x}_{n,c,h,w} + \beta_c $$
#### 3. **实现细节**
- 分组数$G$为超参数(通常设为32)。
#### 4. **优缺点**
- **优点**:在小批量下表现稳定。
- **缺点**:需手动调参分组数。
---
### 五、其他归一化
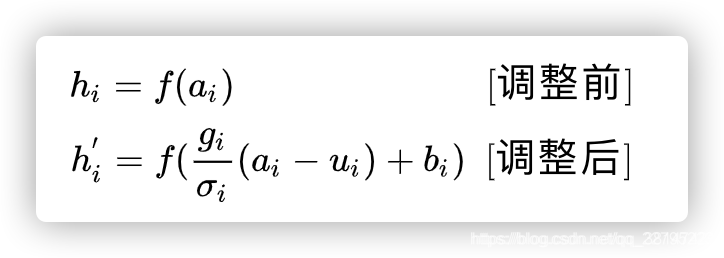
1. **权重归一化(Weight Normalization)**
- 对权重矩阵重参数化:$w = \frac{g}{\|v\|}v$,加速收敛。
2. **谱归一化(Spectral Normalization)**
- 约束权重矩阵的谱范数,用于稳定GAN训练。
---
### 六、对比总结
| 方法 | 归一化维度 | 适用场景 | 依赖批量大小 |
|------------|-----------------------|------------------------|--------------|
| Batch Norm | (N, H, W) | 卷积网络 | 是 |
| Layer Norm | (C, H, W) | RNN/Transformer | 否 |
| Instance | (H, W) | 图像生成 | 否 |
| Group Norm | 通道分组 | 小批量任务(如检测) | 否 |
---
### 七、核心作用
1. **稳定训练**:通过约束输入分布,缓解梯度异常。
2. **加速收敛**:允许更大学习率。
3. **轻微正则化**:噪声来自小批量统计(如BN)。
代码实现(以PyTorch为例):
```python
# BN(卷积网络)
bn = nn.BatchNorm2d(num_features=C)
# LN(Transformer)
ln = nn.LayerNorm(normalized_shape=d_model)
# GN(目标检测)
gn = nn.GroupNorm(num_groups=G, num_channels=C)
```




























 2557
2557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









