







长文本快速配置表模板——使用说明
1. 前言
在进行KUKA交互信号注释信息配置的时候,需要通过WorkVisual的长文本编辑器(Symbol Table Editor)对每个信号一个个填写注释信息或一条条Copy,十分低效。尤其在编辑大量交互信号时,这种重复的、低效的、机械式的操作让我这个“自动化技术爱好者”感到十分不爽。信息技术时代的我们应该会很敏锐地发现这个简单机械化的任务肯定有一种更加自动高效地方式实现。
在项目实践中最终发现可以直接利用WorkVisual导入CSV文件的功能进行快速导入,但WorkVisual导出的CSV格式并不方便编辑与批量填充信息。因此想联想到:用功能强大的Excel格式文件进行预处理,最后通过Execl导出最终CSV文件进行导入。
为了更加高效便捷、清晰直观地利用“ROB交互信号表1”中定义好的交互注释信息来快速导入到长文本编辑器中,特设计了一个这样一张“文本快速配置导入”Excel模板。
通过本文在此分享模板与使用说明,如有需要,模板下载链接2在文章末尾参考资料处。
2. 测试环境
- ROB:
- 控制器:KRC4 (8.6.13)
- 系统固件:KSS 8.6.13
- 本体:KR 210 R2700-2
- IDE:WorkVisual 6.0.31
- 电子表格:Microsoft Office Professional 2019
3. 长文本快速配置表模板介绍
3份模板文件设计、使用目的如下:

在设计是编程上习惯了用英文,且与WorkVisual长文本编辑器英文统一故按照全英文设计了。为了方便中文用户我又写了部分中文化的版本供选择使用。两份效果一样都可以导出符合标准的CSV文件。
- 1.ROB-IO-SymbolTable.csv :WorkVisual可导入的标准格式的信号表CSV文件。(Comma-Separated Values,CSV,逗号分隔值文件)。生成的可导入文件范例(下载链接2)
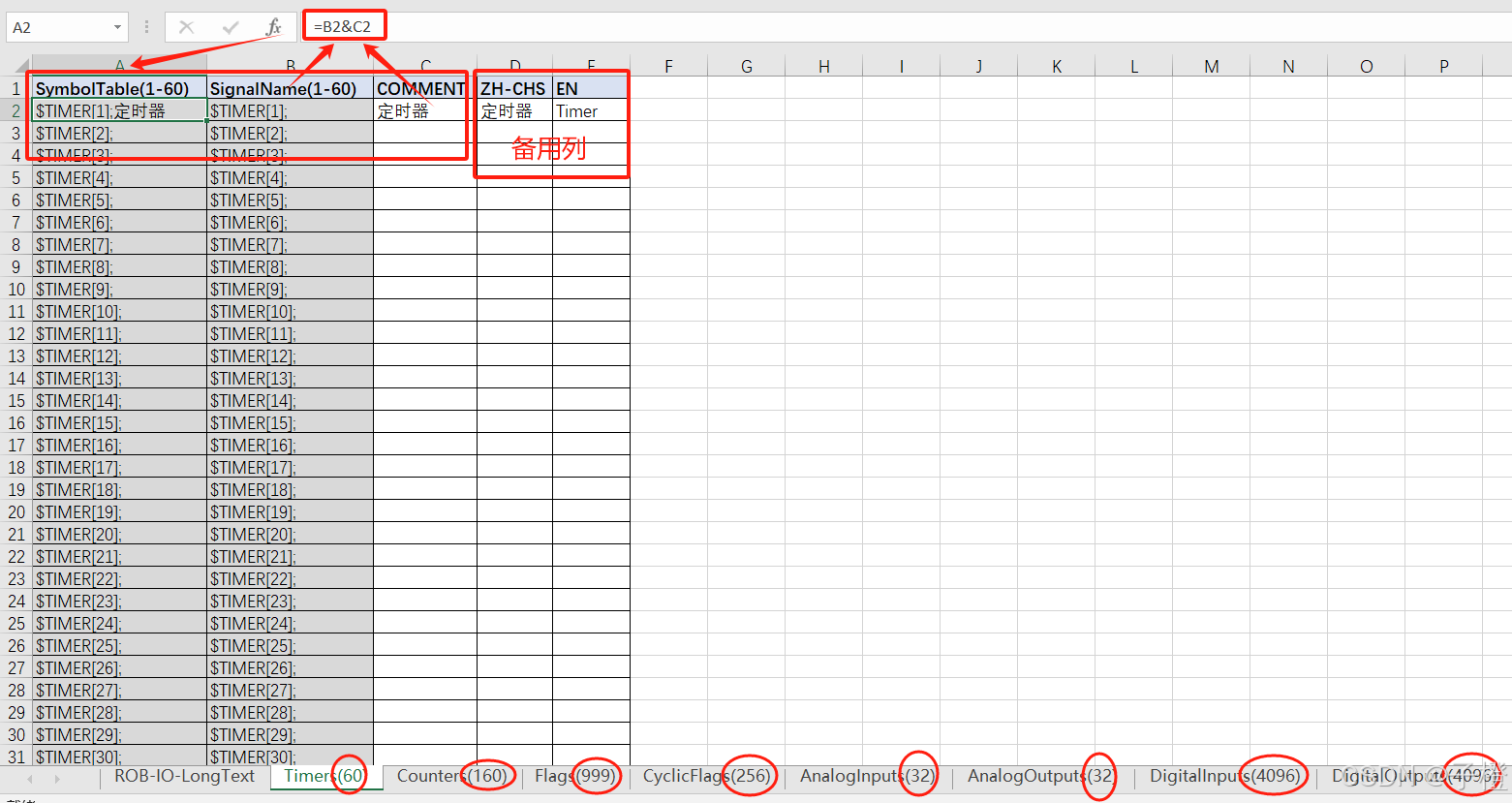
- 2.ROB-SymbolTable-EditTemplate-en.xlsx:对WorkVisual编辑器中所有系统变量进行归类分表,方便配置编辑变量信息,同时利用Excel函数功能进行交叉引用组合为符合标准格式的表,这样方便生成CSV文件,进而快速导入到WorkVisual长文本编辑器中。 英文版(下载链接3)
- 3.ROB-SymbolTable-EditTemplate-zh.xlsx:与2模板文件基本相同,只是为了方便中文用户选择。 中文版(下载链接4)
模板内含子表(WorkSheet)说明:


- ROB-IO-长文本表(ROB-IO-LongText):
此表为其它分类表引用生成。其最终用于导出CSV文件。这个表一般不允许修改,有必要 可以对这个工作表单独进行加密锁定进行保护,以避免误修改导致最终生成CSV文件异常。
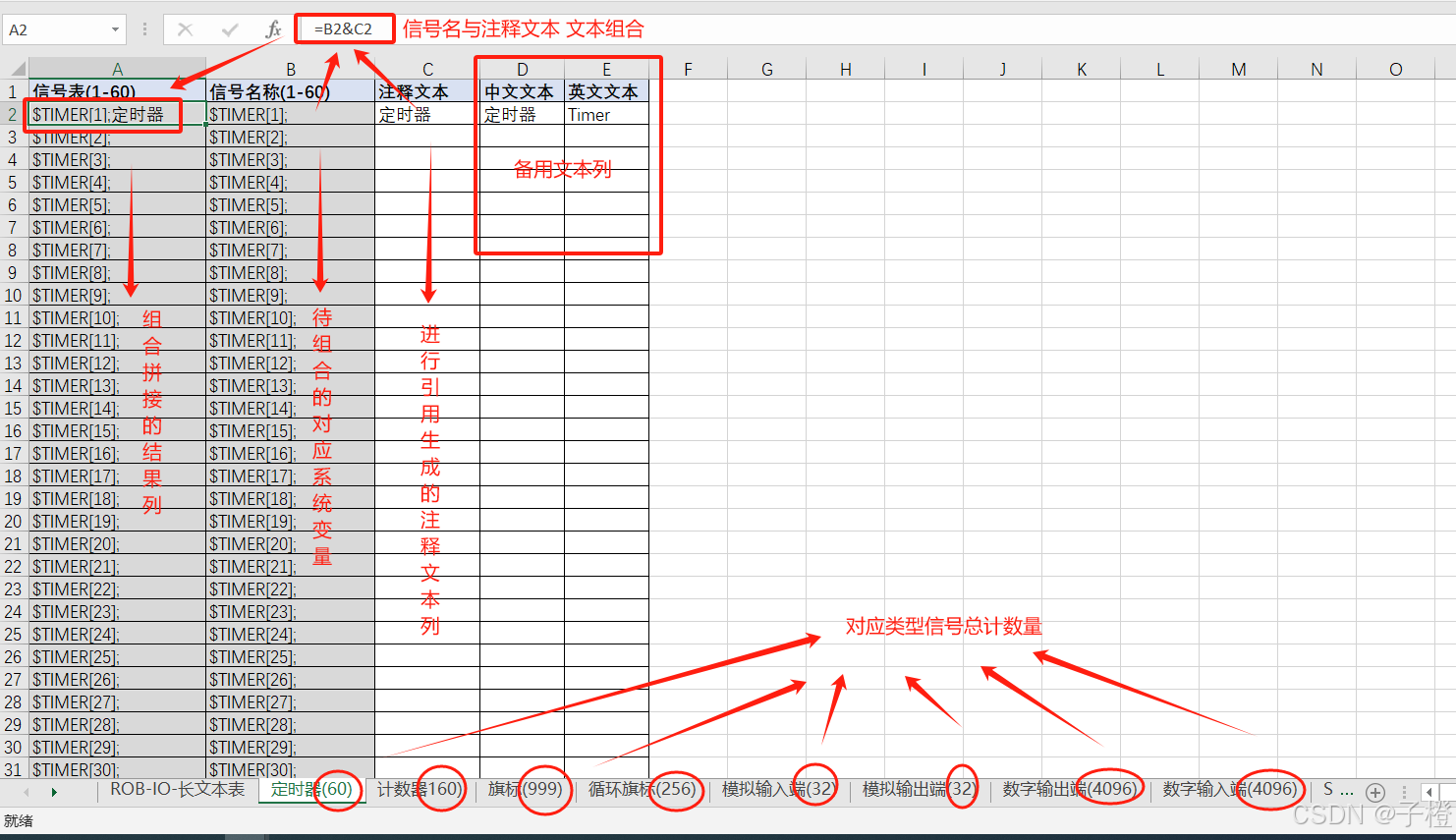
- 其它配置表:
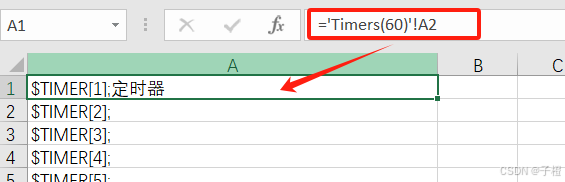
其它配置表大概结构基本一致,这里以定时器表为例说明。对应信号配置表格第一列(A列)为该类信号的组合拼接结果(公式如下图 Ax = Bx & Cx)。因此C列才是实际配置的注释信息,D列与E列为存放各语言注释信息列。在需要导出对应语言文本注释时,复制相应列到C列中即可导出对应语言版本的CSV文件。
4. WorkVisual快速导入步骤
Excel编辑 > Excel导出CSV > WorkVisual导入CSV > 工程下载至KUKA机器人。
4.1 填写对应信号所在子表中地文本注释信息列
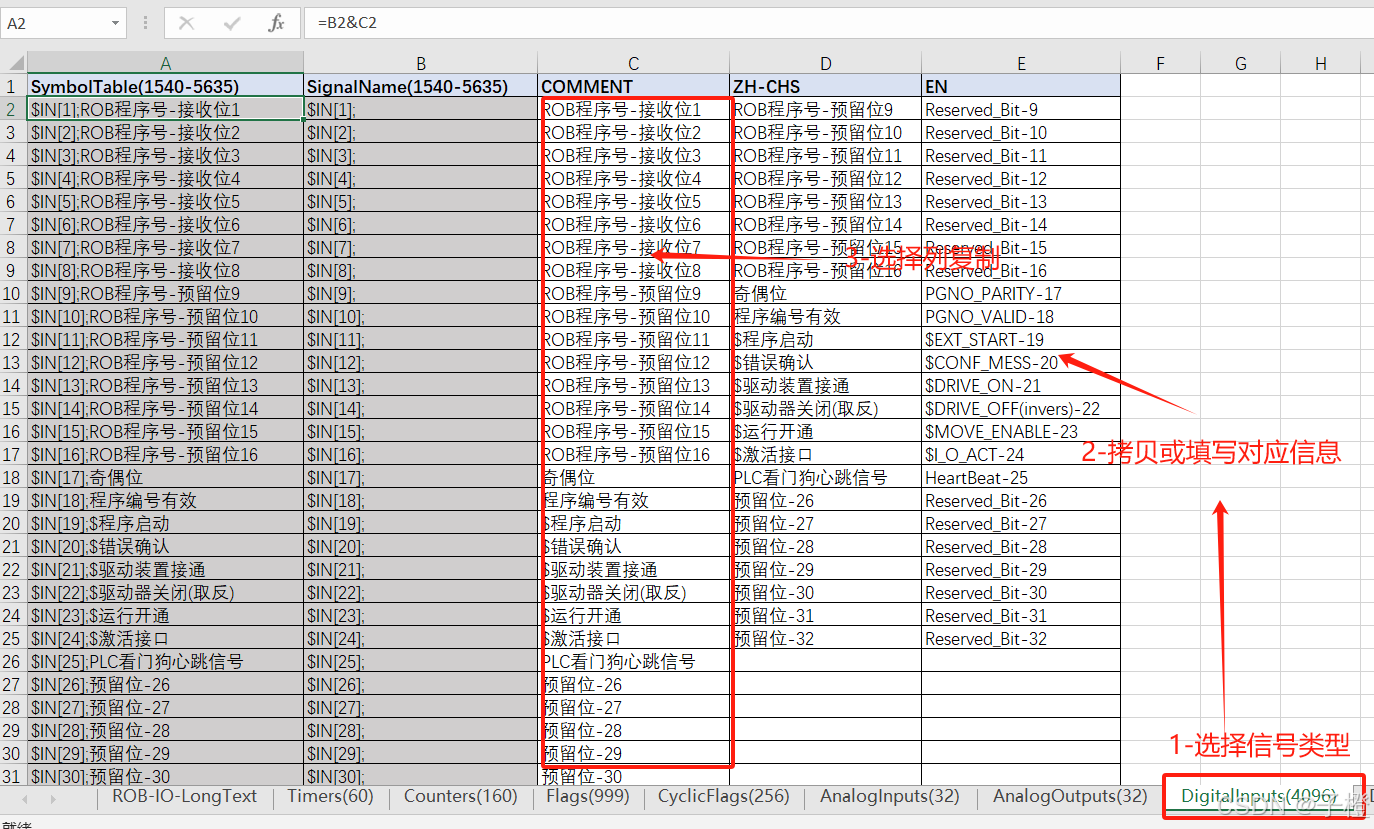
(注意: 这里实际导入的列只有C列信息,D、E列若无需要可以不用填写。)
4.2 Excel导出标准格式的信号配置CSV文件
-
选择对应长文本表
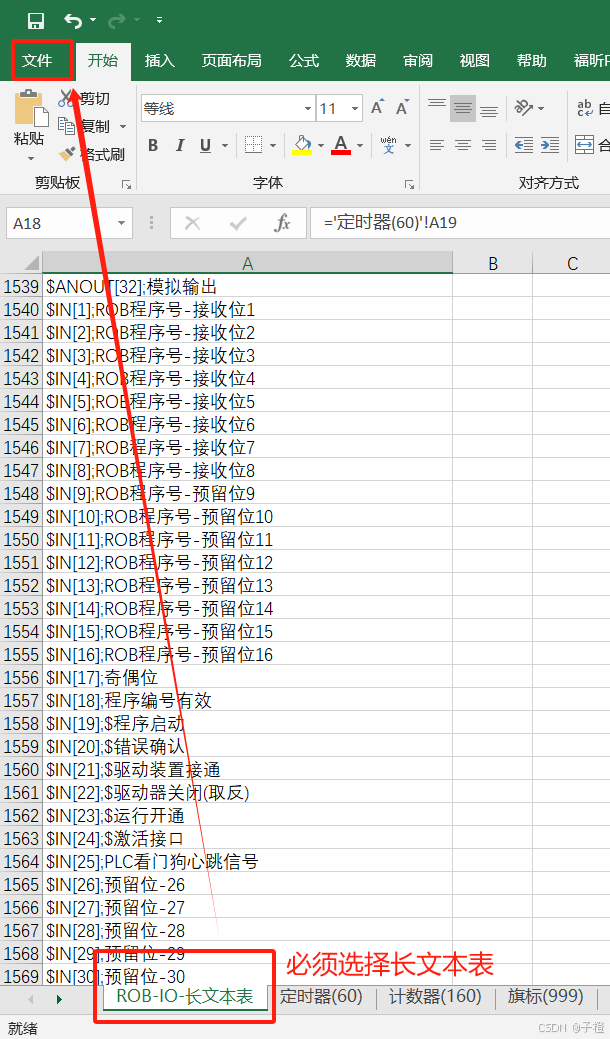
(注意: 配置完后,这步必须选择激活ROB-IO长文本表,否则导出的是其他表的信息) -
选择另存为选项卡 > 选择存储位置 将弹出另存为对话框
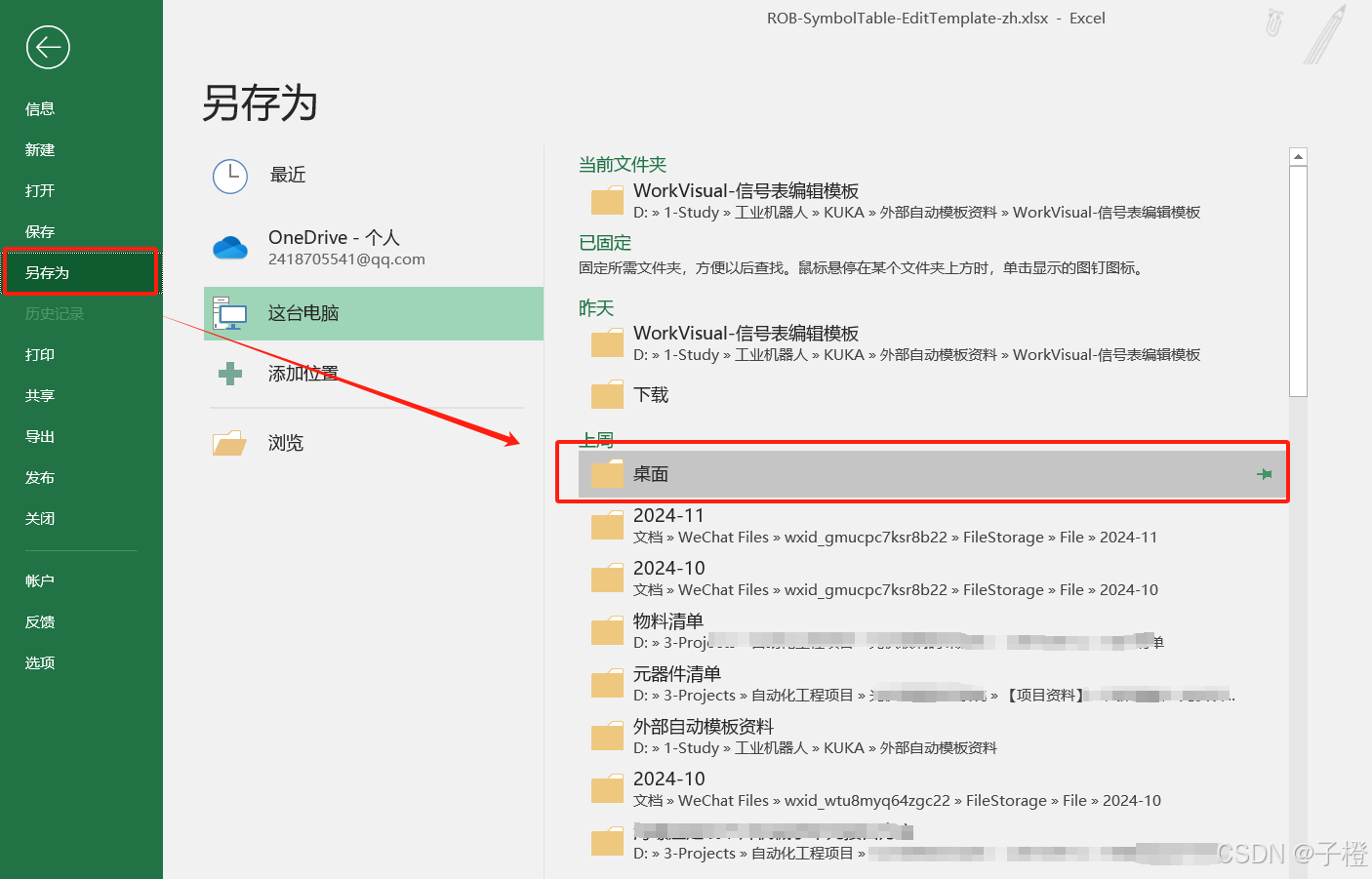
-
保存类型选择下图所示CSV格式,然后填写好文件名称保存即可在所选路径下导出长文本对应的CSV格式文件。
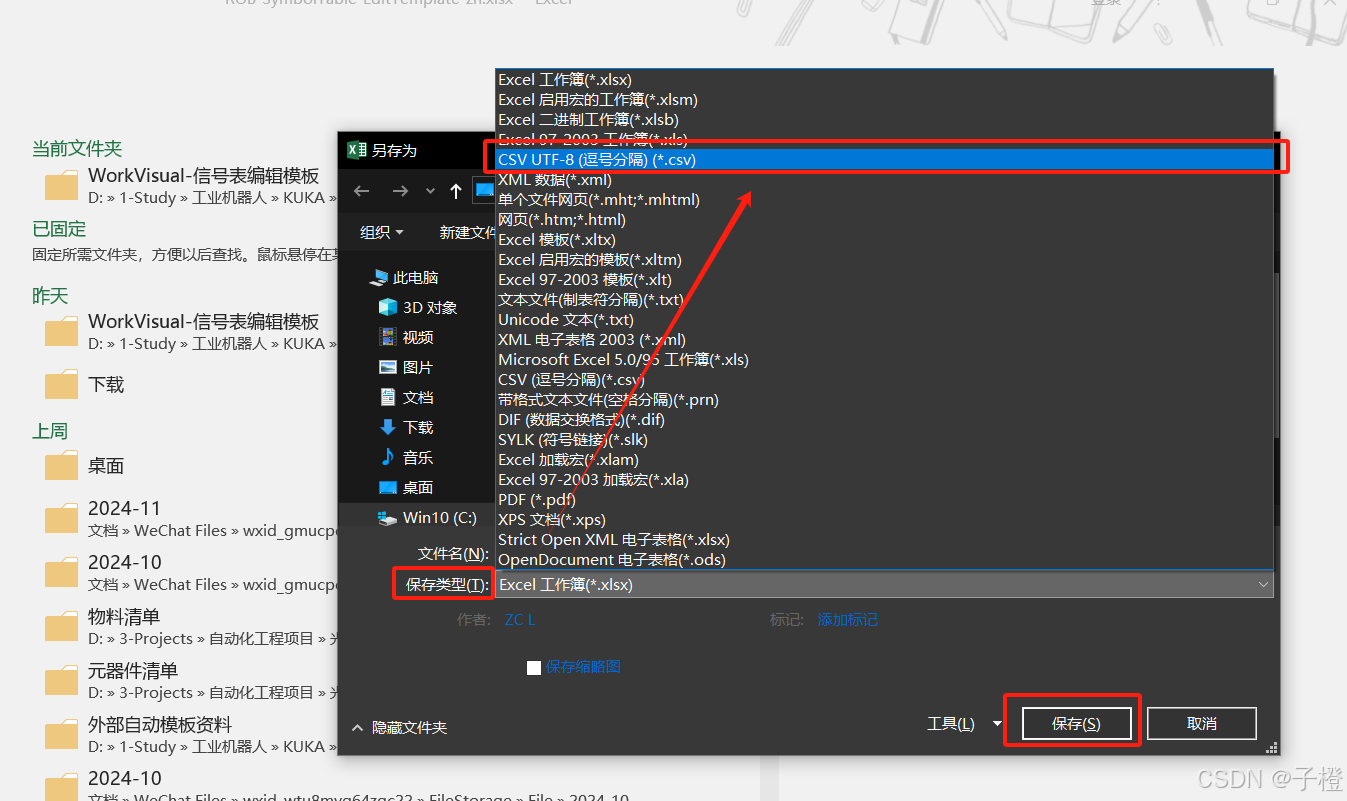
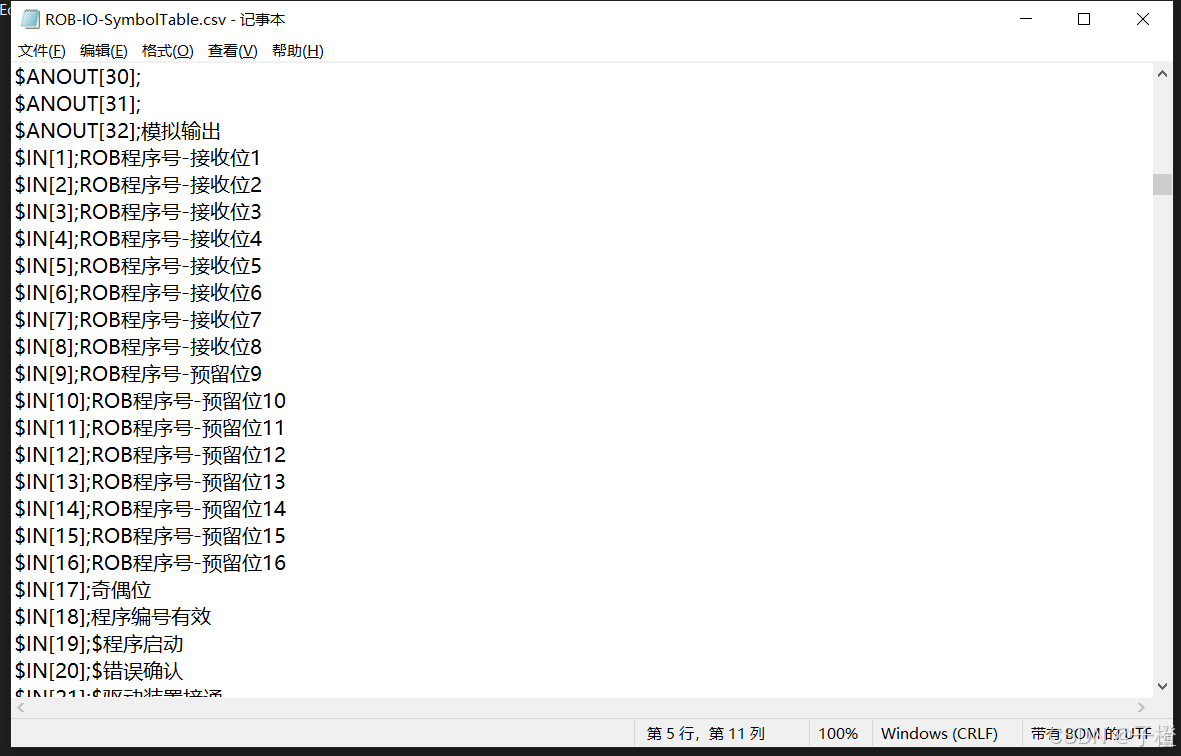
生成的CSV文件文本类型的数据,可以直接用文本编辑器打开如下图所示:
4.3 WorkVisual导入已生成的CSV文件
-
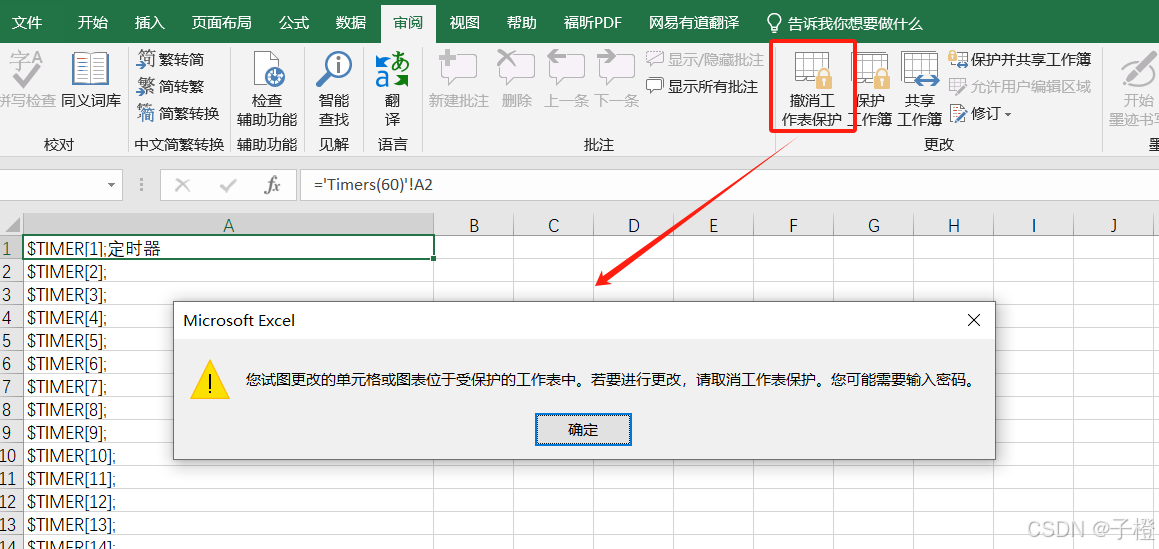
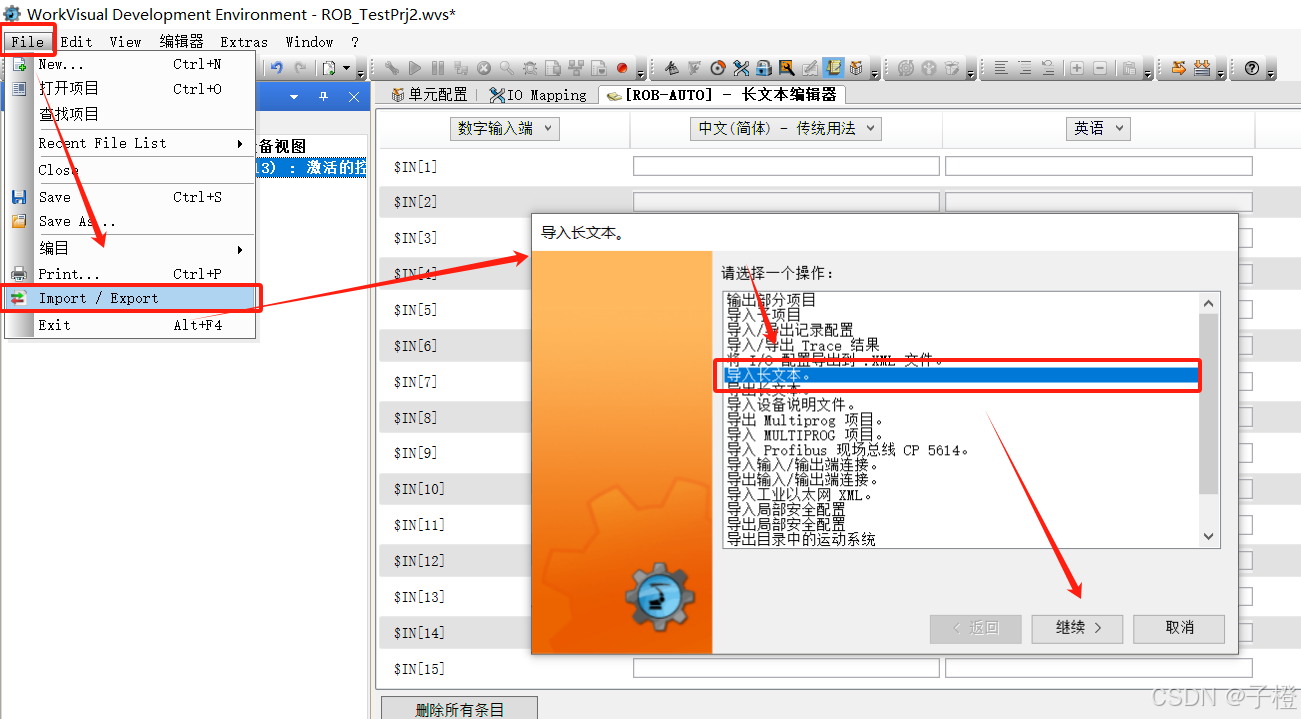
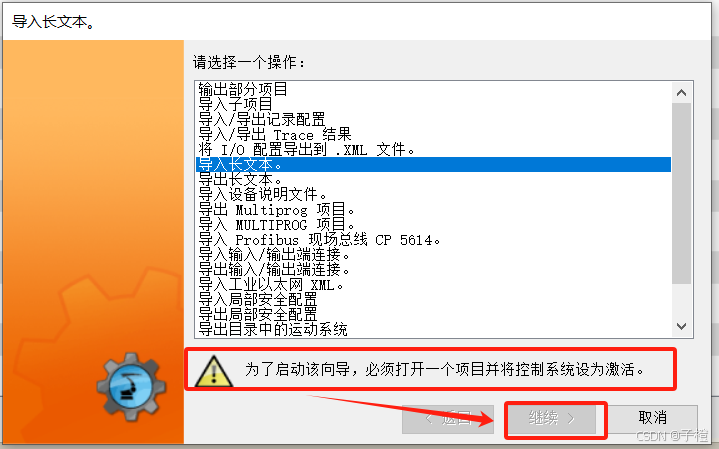
打开工程 > 激活对应控制器 >【File】 > 【Import/Export】 > 在弹出的窗r口中选择“ 导入长文本”,点击【继续】即可打开导入【长文本界面】。
(注意必须选择并激活对工程中“控制系统”,否则将出现如图所示报警)
-
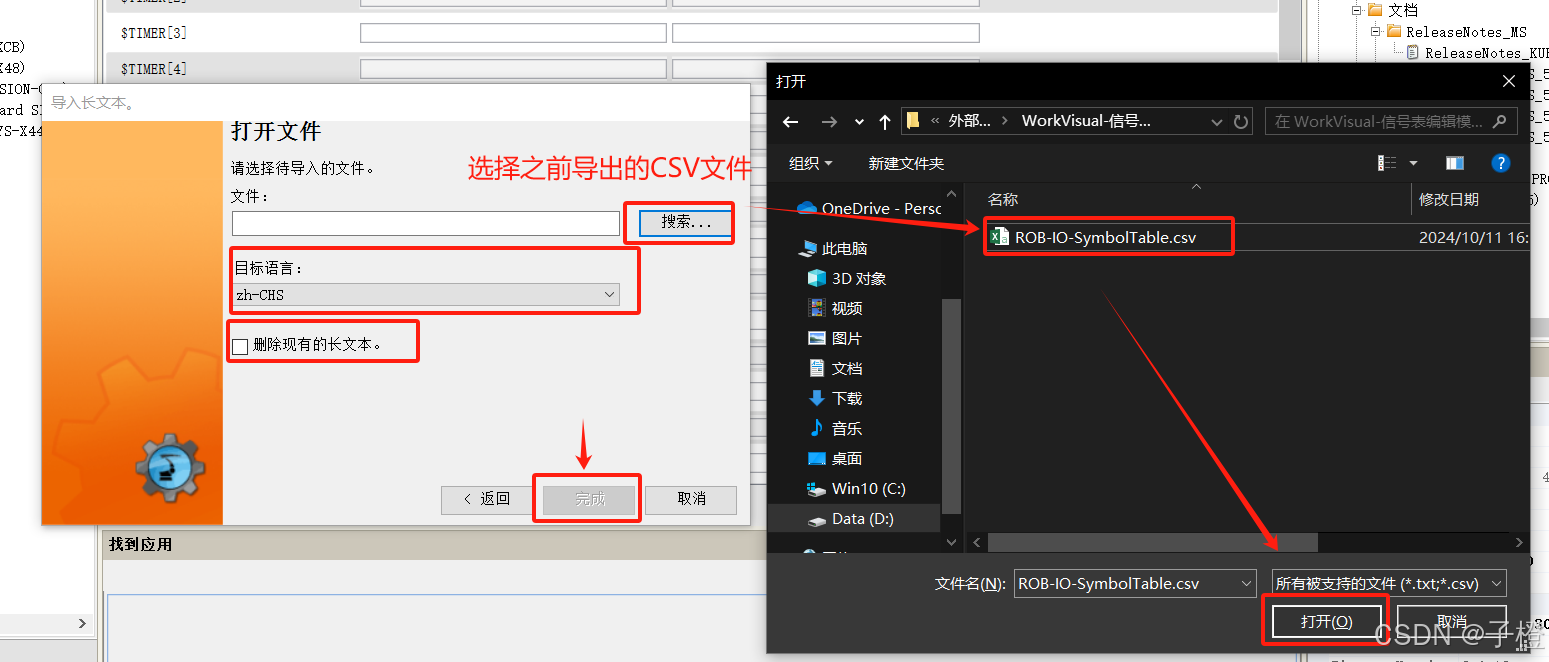
在弹出的界面中点击【搜索…】按钮进行待导入CSV文件选择,之后在【目标语言】下拉列表中选择对应语言(zh-CHS,简体中文)。【删除现有长文本】勾选框将再导入新注释信息前删除工程已有的备注信息。
-
上图点击【完成】即可显示如下导入成功界面,关闭即可。

-
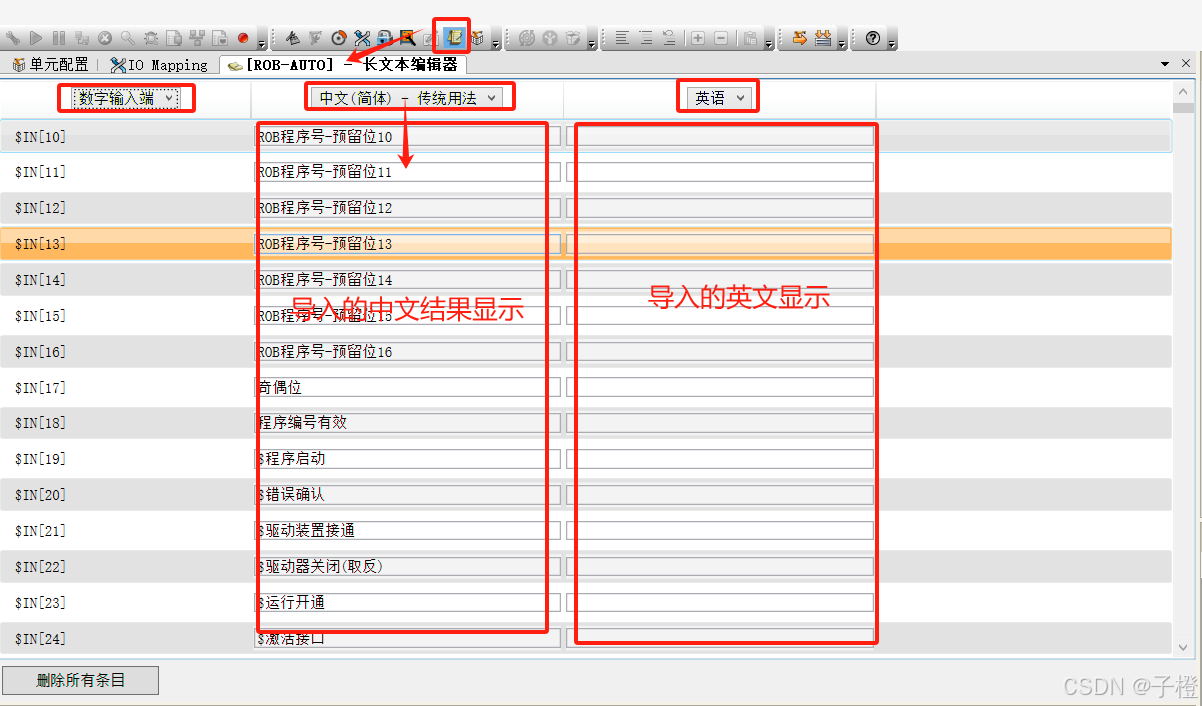
在对应工程【长文本编辑器】中即可查看导入的对应语言注释信息。
4.4 上传工程项目到KRC控制器中
完成上面导入步骤并检查验证所有注释基本无误后,即可将工程编译、下载到机器人控制系统中。这样在机器人示教器中输入输出信号表中即可看到对应注释信息。
5. 总结
模板表格设计经过测试,使用上也算比较简单、快捷。对于大部分工程师来说这个说明书写的相对有点详细啰嗦了。大家下载模板大致浏览以下表格结够的说明就用该十分清楚如何使用这个表格了 。好了,希望此表给大家带来些许便利!
参考资料:

















 5125
5125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









