







环境说明
当前虚拟机的下载地址已经挂掉,我大概扫了一眼作业文件,就是一份普通的 c++ 文件配合 cmake 脚本编译,那我们没有虚拟机,自己手动配个环境也不是问题
- 平台:Windows11
- IDE:Visual Studio 2022 + VA番茄助手插件
- 第三方库:Eigen3 作业里用到了这个库,直接去官方下载,引用头文件即可,无需动态链接库支持
作业说明
作业要求
给定一个点 P=(2,1), 将该点绕原点先逆时针旋转 45°,再平移 (1,2), 计算出变换后点的坐标(要求用齐次坐标进行计算)
作业讲解
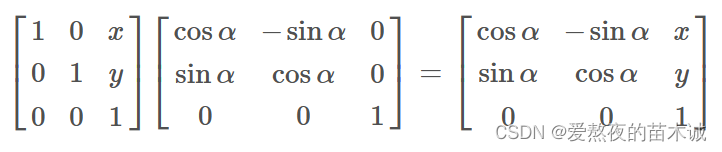
注意一下题目,这里是先旋转,再位移,所以这里用齐次坐标是完全没有问题的,如果顺序相反,那就不行了,齐次坐标就是下面这样,矩阵可以理解为一个函数,先执行右边的,然后得出结果返回继续给下一个矩阵计算
#include <cmath>
#include <iostream>
#include "Core"
#include "Dense"
static double Ang2Rad = atan(1.0) / 45.0;
// 不建议使用 using namespace 语句,多个库会造成命名混乱,加上作用域看起来更加清晰明了
int main()
{
/**
* 这里要注意一下
* sin()和cos()参数传入的是弧度,而不是角度
* 所以我们这里要转换一下
* 如果这个转换公式看不懂那就得好好补习一下三角函数了
*/
double rad = 45 * Ang2Rad;
Eigen::Vector3f point(2.0f, 1.0f, 1);
Eigen::Matrix3f matrix;
matrix <<
std::cos(rad), -std::sin(rad), 1,
std::sin(rad), std::cos(rad), 2,
0, 0, 1;
std::cout << "矩阵" << std::endl;
std::cout << matrix << std::endl;
std::cout << "点" << std::endl;
std::cout << point << std::endl;
std::cout << "转换后的点" << std::endl;
std::cout << matrix * point << std::endl;
return 0;
}















 281
281











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









