






双目视觉测距原理及应用
作者:凌启科技
1 双目视觉测距原理
双目视觉测距原理可分为相似三角形原理和像素尺度原理,前者是目前主流的解释,后者是凌启科技公司命名的一种原理,具体如下。
1.1 相似三角形原理
目前对双目视觉测距原理的解释是三角形相似原理,如下图1(图片来源链接https://cloud.tencent.com/developer/article/2054308),Or和Ot分别为两个平行放置的相机,B为两个相机光轴的距离,f为镜头焦距,P点为场景中的一个实物点,Z为实物点P到相机的距离。
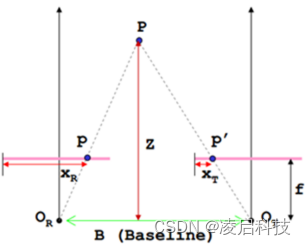
图1
根据相似三角形原理,可得式1,进而可推导出Z的表达式,见式2。
 …………………………………………………(式1)
…………………………………………………(式1)
 ………………………………………………………(式2)
………………………………………………………(式2)
1.2 像素尺度原理
如下图2,相机在位置1,其视场角为β,距离地面Z,拍摄到的地面宽度为L,图片像素为W*H,场景中有一点P,相机在位置1时P点的x轴像素坐标为X1。
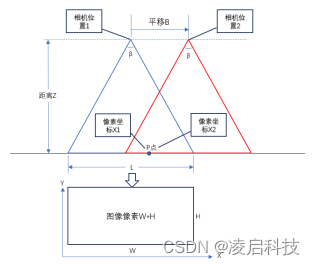
图2
我们可以很容易得到距离Z的表达式见式3,β与镜头有关,为已知项,只要知道L就能求出Z,而L包含了W了像素,只要求出每个像素所代表的距离,就能求出Z。
 ………………………………………………(式3)
………………………………………………(式3)
现在将相机从左向右移动距离B到位置2,此时P点在图片中的x轴像素坐标为X2,这样,我们就能求出每个像素所代表的距离t,见式4,
 ………………………………………………(式4)
………………………………………………(式4)
所以L=Wt,于是便可求得Z,见式5
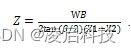 ………………………………………(式5)
………………………………………(式5)
假如我们直接在位置2放置一个与相机1相同参数的相机,就可利用双目相机测距。















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









