






前两期讲到:光流模块的作用、飞控融合光流数据的方法,本期我们主要讲:光流模块使用过程中需要注意的问题。
主要问题包括倾角补偿和光流数据的距离伸缩:
倾角补偿主要是因为当无人机产生倾角时,光流模块也会检测到位移,这是我们不想要的,所以需要利用IMU测得的倾角将这个值给补偿掉,不然无人机会左右摇晃。
具体的倾角补偿思路如图1,无人机开始处于状态1,发生小的倾角后,处于状态2,而此时对于光流模块而言,相当于无人机平移到了状态3,所以会测得Δx位移,而此时IMU测到了倾角β,当倾角较小时,Δx=H*tan(β)=H*β,所以可以用β来补偿Δx。
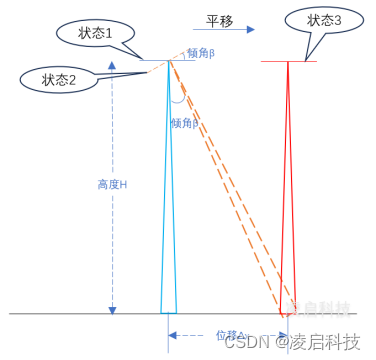
图1 倾角补偿原理
光流数据的距离伸缩主要是因为大部分光流模块输出的数据是像素位移,需要乘以高度后才能真正的表征无人机在物理世界中的位移,而凌启科技开发的双目测距及光流一体模块输出的光流数据本身就是无人机在物理世界中的位移,所以在使用该模块时,不用进行距离伸缩。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









