







SIFT特征和SURF特征比较
比较项目 | SIFT | SURF |
尺度空间极值检测 | 使用高斯滤波器,根据不同尺度的高斯差(DOG)图像寻找局部极值 | 使用方形滤波器,利用海森矩阵的行列式值检测极值,并利用积分图加速运算 |
关键点定位 | 通过邻近信息插补来定位 | 与SIFT类似 |
方向定位 | 通过计算关键点局部邻域的方向直方图,寻找直方图中最大值的方向作为关键点的主方向 | 通过计算特征点周围像素点x,y方向的哈尔小波变换,将x、y方向小波变换的和向量的最大值作为特征点方向 |
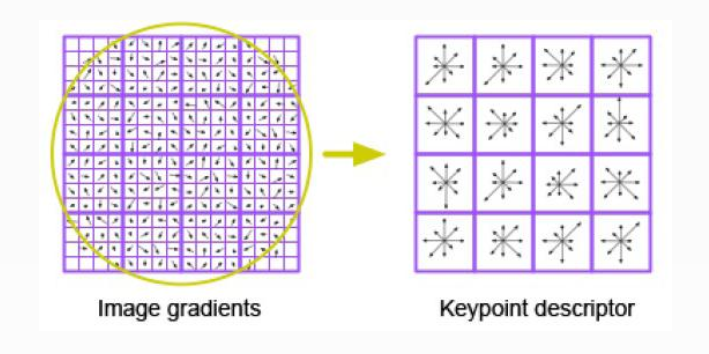
特征描述子 | 是关键点邻域高斯图像梯度方向直方图统计结果的一种表示,是16*8=128维向量 | 是关键点邻域2D离散小波变换响应的一种表示,是16*4=64维向量 |
应用中的主要区别 | 通常在搜索正确的特征时更加精确,当然也更加耗时 | 描述子大部分基于强度的差值,计算更快捷 |
SIFT特征基本介绍
SIFT(Scale-Invariant Feature Transform)特征检测关键特征:
建立尺度空间,寻找极值
关键点定位(寻找关键点准确位置与删除弱边缘)
关键点方向指定
关键点描述子
建立尺度空间,寻找极值
工作原理
构建图像高斯金字塔,求取DOG,发现最大与最小值在每一级
构建的高斯金字塔,每一层根据sigma的值不同,可以分为几个待级,最少有4个。
关键点定位
我们在像素级别获得了极值点的位置,但是更准确的值应该在亚像素位置,如何得到--这个过程称为关键点(准确/精确)定位。
删除弱边缘--通过Hassian矩阵特征值实现,小于阈值自动舍弃。
关键点方向指定
求得每一层对应图像的梯度,根据给定的窗口大小
计算每个高斯权重,sigma=scale*1.5, 0-360之间建立36个直方图Bins
找最高峰对应的Bin,大于max*80%的都保留
这样就实现了旋转不变性,提高了匹配时候的稳定性
大约有15%的关键点会有多个方向
关键点描述子
拟合多项式插值寻找最大Peak
得到描述子 = 4*4*8=128
构造函数
cv::xfeatures2d::SIFT::create(
int nfeatures = 0,
int nOctaveLayers = 3, --高斯金字塔乘积数
double contrastThreshold = 0.04, --对比度
double edgeThreshold = 10, --边缘阈值,一般默认10就行
double sigma = 1.6
)示例代码
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <iostream>
using namespace cv;
using namespace cv::xfeatures2d;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("test.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
// SIFT特征点检测
int minHessian = 100;
Ptr<SIFT> detector = SIFT::create(minHessian);//和surf的区别:只是SURF→SIFT
vector<KeyPoint> keypoints;
detector->detect(src, keypoints, Mat());//找出关键点
// 绘制关键点
Mat keypoint_img;
drawKeypoints(src, keypoints, keypoint_img, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("KeyPoints Image", keypoint_img);
waitKey(0);
return 0;
}















 2120
2120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











