






模糊控制库安装
模糊控制库github:链接: Github.
python pip安装:pip install scikit-fuzzy
示例
1.选择输入输出模糊集
2.定义输入输出隶属度函数(不同的隶属度函数,会导致不同的控制特性)
3.建立模糊控制表
4.建立模糊控制规则
5.模糊推理
6.反模糊化
7.输出结果绘制结果3D图
例子:输入为服务(service)和质量(quality)两个参数,输出为得到的小费(tip)
定义模糊控制变量
1.定义模糊控制变量,质量和服务的取值范围为[0,10],小费范围为[0,25]
x_qual = np.arange(0, 11, 1)
x_serv = np.arange(0, 11, 1)
x_tip = np.arange(0, 26, 1)
quality = ctrl.Antecedent(x_qual, 'quality')
service = ctrl.Antecedent(x_serv, 'service')
tip = ctrl.Consequent(x_tip, 'tip')
模糊隶属函数
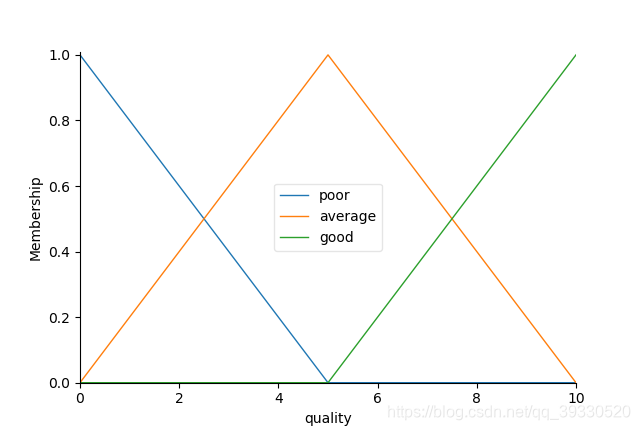
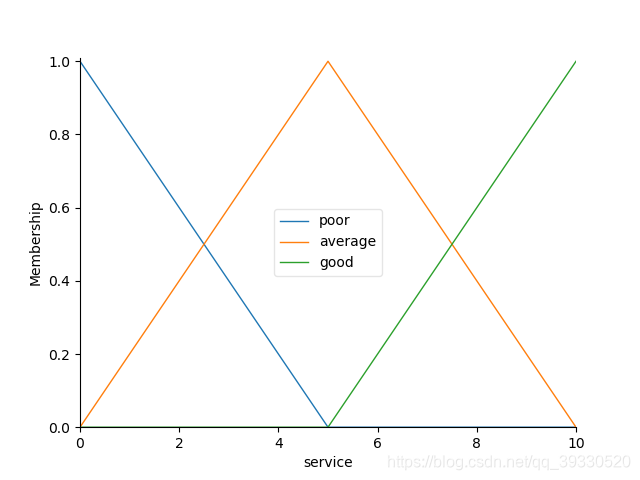
2.生成模糊隶属函数,这里是三角形隶属度函数,可以自己定义隶属度范围,也可以用automf函数自动生成
#定义质量差时的三角隶属度函数横坐标
quality['L'] = fuzz.trimf(x_qual, [0, 0, 5])
quality['M'] = fuzz.trimf(x_qual, [0, 5, 10])
quality['H'] = fuzz.trimf(x_qual, [5, 10, 10])
#若使用automf自动生成代码为
##names = ['L', 'M', 'H']
##quality.automf(names=names) #自动分配
#定义服务差时的三角隶属度函数横坐标
service['L'] = fuzz.trimf(x_serv, [0, 0, 5])
service['M'] = fuzz.trimf(x_serv, [0, 5, 10])
service['H'] = fuzz.trimf(x_serv, [5, 10, 10])
#定义小费的三角隶属度函数横坐标
tip['L'] = fuzz.trimf(x_tip, [0, 0, 13])
tip['M'] = fuzz.trimf(x_tip, [0, 13, 25])
tip['H'] = fuzz.trimf(x_tip, [13, 25, 25])
#解模糊方法采用质心法
tip.defuzzify_method='centroid'
#可视化这些输入输出和隶属函数
# quality.automf(3) #自动分配几种程度NS ZO PS
#service.automf(3)
#quality.view()
# service.view()
# plt.show()
模糊规则
3.制定模糊规则,即服务,质量和小费的关系
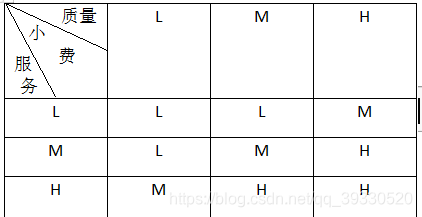
rule1=ctrl.Rule(antecedent=((quality['L'] & service['L'])|(quality['L'] & service['M'])|(quality['M'] & service['L'])),consequent=tip['L'],label='Low')
rule2=ctrl.Rule(antecedent=((quality['M']&service['M'])|(quality['L']&service['H'])|(quality['H']&service['L'])),consequent=tip['M'],label='Medium')
rule3=ctrl.Rule(antecedent=((quality['M']&service['H'])|(quality['H']&service['M'])|(quality['H']&service['H'])),consequent=tip['H'],label='High')
#rule2.view() #这个图我没看懂,有哪位看懂了可以告知一下
激活模糊控制器
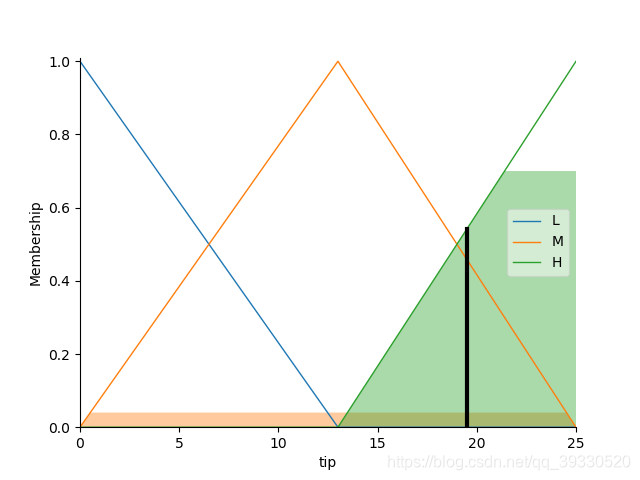
4.激活模糊控制器,输入质量值6.5,服务值为9.8时,输出小费的值,并绘制结果
tipping_ctrl = ctrl.ControlSystem([rule1, rule2, rule3])
tipping = ctrl.ControlSystemSimulation(tipping_ctrl)
tipping.input['quality'] = 6.5
tipping.input['service'] = 9.8
tipping.compute()
print (tipping.output['tip'])
tip.view(sim=tipping)
plt.show()
3D可视化结果
模糊控制库也可输出类似于MATLAB的3D结果图,代码如下:
逐间隔输入控制参数,输出结果并绘制在3D图中
upsampled = np.linspace(0, 11, 21) #这里的范围不能错,测试参数步距
x, y= np.meshgrid(upsampled, upsampled)
z = np.zeros_like(x)
##tipping.input['angle'] = 0
##tipping.input['distance'] = 0
##tipping.compute()
##print (tipping.output['out'])
#out.view(sim=tipping)
pp=[]
for i in range(0,21):
for j in range(0,21):
tipping.input['quality']=x[i, j]
tipping.input['service'] = y[i, j]
tipping.compute()
z[i, j] = tipping.output['tip']
pp.append(z[i,j])
print('max:',max(pp))
print('min:',min(pp))
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure(figsize=(8, 8)) #定义画布大小
ax = fig.add_subplot(111, projection='3d')
surf = ax.plot_surface(x, y, z, rstride=1, cstride=1, cmap='viridis',linewidth=0.4, antialiased=True)
#cset = ax.contourf(x, y, z, zdir='z', offset=-2.5, cmap='viridis', alpha=0.5)
#cset = ax.contourf(x, y, z, zdir='x', offset=3, cmap='viridis', alpha=0.5)
#cset = ax.contourf(x, y, z, zdir='y', offset=3, cmap='viridis', alpha=0.5)
ax.view_init(30, 200) #设置观察角度
plt.show()
下图为输出仿真结果3D图

完整代码
import numpy as np
import skfuzzy as fuzz
import matplotlib.pyplot as plt
from skfuzzy import control as ctrl
import math
# 质量和服务范围为[0,10]
# 小费范围为[0,25]
x_qual = np.arange(0, 11, 1)
x_serv = np.arange(0, 11, 1)
x_tip = np.arange(0, 26, 1)
# 定义模糊控制变量
quality = ctrl.Antecedent(x_qual, 'quality')
service = ctrl.Antecedent(x_serv, 'service')
tip = ctrl.Consequent(x_tip, 'tip')
# 生成模糊隶属函数
quality['L'] = fuzz.trimf(x_qual, [0, 0, 5]) #定义质量差时的三角隶属度函数横坐标
quality['M'] = fuzz.trimf(x_qual, [0, 5, 10])
quality['H'] = fuzz.trimf(x_qual, [5, 10, 10])
service['L'] = fuzz.trimf(x_serv, [0, 0, 5]) #定义服务差时的三角隶属度函数横坐标
service['M'] = fuzz.trimf(x_serv, [0, 5, 10])
service['H'] = fuzz.trimf(x_serv, [5, 10, 10])
tip['L'] = fuzz.trimf(x_tip, [0, 0, 13]) #定义小费的三角隶属度函数横坐标
tip['M'] = fuzz.trimf(x_tip, [0, 13, 25])
tip['H'] = fuzz.trimf(x_tip, [13, 25, 25])
tip.defuzzify_method='centroid'
#可视化这些输入输出和隶属函数
# quality.automf(3)
#service.automf(3)#三种程度
#quality.view()
# service.view()
# plt.show()
#规则
rule1=ctrl.Rule(antecedent=((quality['L'] & service['L'])|(quality['L'] & service['M'])|(quality['M'] & service['L'])),consequent=tip['L'],label='Low')
rule2=ctrl.Rule(antecedent=((quality['M']&service['M'])|(quality['L']&service['H'])|(quality['H']&service['L'])),consequent=tip['M'],label='Medium')
rule3=ctrl.Rule(antecedent=((quality['M']&service['H'])|(quality['H']&service['M'])|(quality['H']&service['H'])),consequent=tip['H'],label='High')
rule2.view()
tipping_ctrl = ctrl.ControlSystem([rule1, rule2, rule3])
tipping = ctrl.ControlSystemSimulation(tipping_ctrl)
# 测试输出
# tipping.input['quality'] = 6.5
# tipping.input['service'] = 9.8
# tipping.compute()
# print (tipping.output['tip'])
# tip.view(sim=tipping)
# plt.show()
# 仿真结果3D图输出,使用下列代码时请注释掉上面的测试输出
upsampled = np.linspace(0, 11, 21)#这里的范围不能错
x, y= np.meshgrid(upsampled, upsampled)
z = np.zeros_like(x)
##tipping.input['angle'] = 0
##tipping.input['distance'] = 0
##tipping.compute()
##print (tipping.output['out'])
#out.view(sim=tipping)
pp=[]
for i in range(0,21):
for j in range(0,21):
tipping.input['quality']=x[i, j]
tipping.input['service'] = y[i, j]
tipping.compute()
z[i, j] = tipping.output['tip']
pp.append(z[i,j])
print('max:',max(pp))
print('min:',min(pp))
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure(figsize=(8, 8)) #定义画布大小
ax = fig.add_subplot(111, projection='3d')
surf = ax.plot_surface(x, y, z, rstride=1, cstride=1, cmap='viridis',linewidth=0.4, antialiased=True)
#cset = ax.contourf(x, y, z, zdir='z', offset=-2.5, cmap='viridis', alpha=0.5)
#cset = ax.contourf(x, y, z, zdir='x', offset=3, cmap='viridis', alpha=0.5)
#cset = ax.contourf(x, y, z, zdir='y', offset=3, cmap='viridis', alpha=0.5)
ax.view_init(30, 200)#设置观察角度
plt.show()
附上模糊控制库网站,有更详细说明和例子:
链接: 模糊控制网站.


















 1975
1975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











