







专利申请中,案件状态一栏是“一通回案实审”,是什么意思?
1 背景

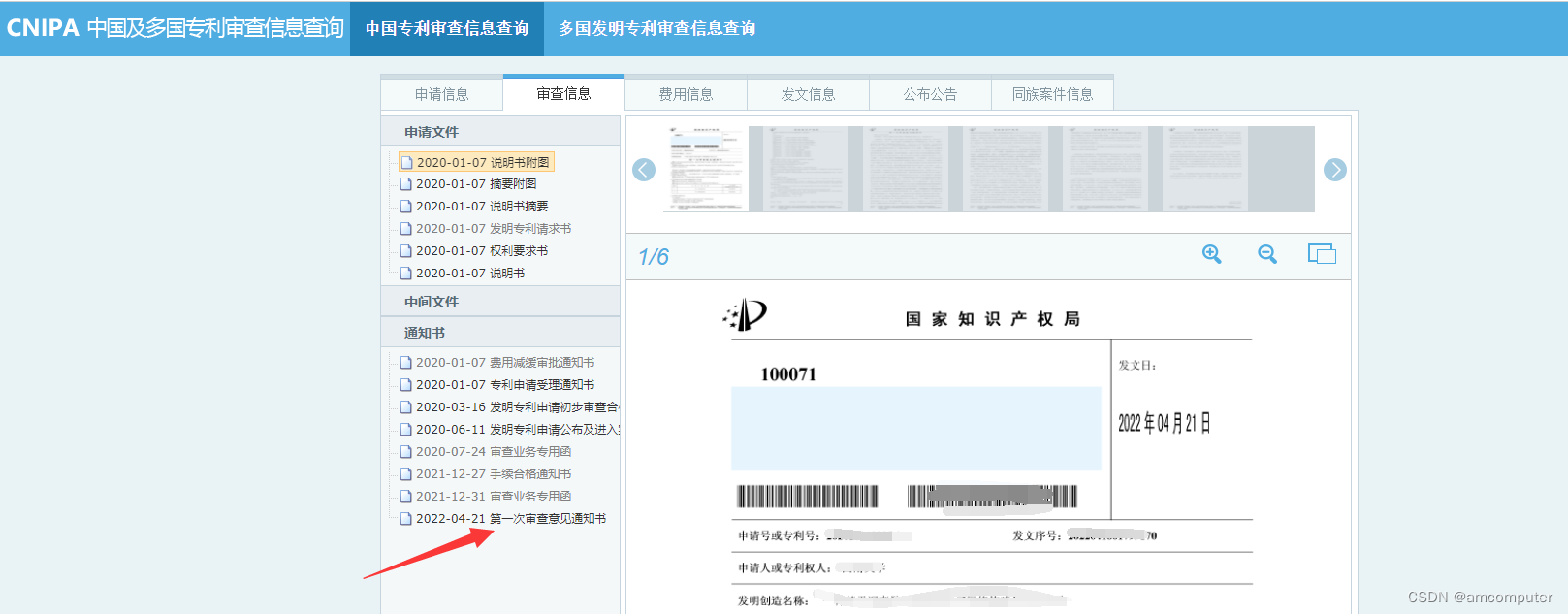
进入国家发明专利网站,发现申请的状态是一通回案实审。
可以进入网站,查看具体的意见通知书,如下面所示:
代理在里面查看意见后
会对具体的问题,进行答复,或者减少发明专利的范围,然后进行答复。 从而进入一通回案实审状态,
这个过程会来往多个过程。
2 一通回案实审
已经收到对第一次审查意见的答复,正在进行进一步审查。
一通回案实审是专利申请的一个术语,
一通: 这个名词代表第一次审查意见通知书,
回案: 这个名词代表到达审查员手里,
一通回案实审的意思是:专利进入实审并发出过第一次审查意见通知书,专利申请人或者专利代理机构根据一通的审查结果,将专利审查员认为无创造性的意见反驳,并提交到专利所里。
表示申请人申请的专利或者发明进入实质审查阶段

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









