









目前已经将车道线的最小二乘拟合及配合rviz可视化实现了。
数学部分
补充:拟合的数学模型是直线一般式
当x1≠x2,y1≠y2时,直线的斜率k=(y2-y1)/(x2-x1)
故直线方程为y-y1=(y2-y1)/(x2-x1)×(x-x1)
即x2y-x1y-x2y1+x1y1=(y2-y1)x-x1(y2-y1)
即(y2-y1)x-(x2-x1)y-x1(y2-y1)+(x2-x1)y1=0
即(y2-y1)x+(x1-x2)y+x2y1-x1y2=0 ①
可以发现,当x1=x2或y1=y2时,①式仍然成立。所以直线AX+BY+C=0的一般式方程就是:
A = Y2 - Y1
B = X1 - X2
C = X2*Y1 - X1*Y2
对于一元二次多项式,可以转换为线性方程组求解,我们一般写成矩阵形式 Ax = y。
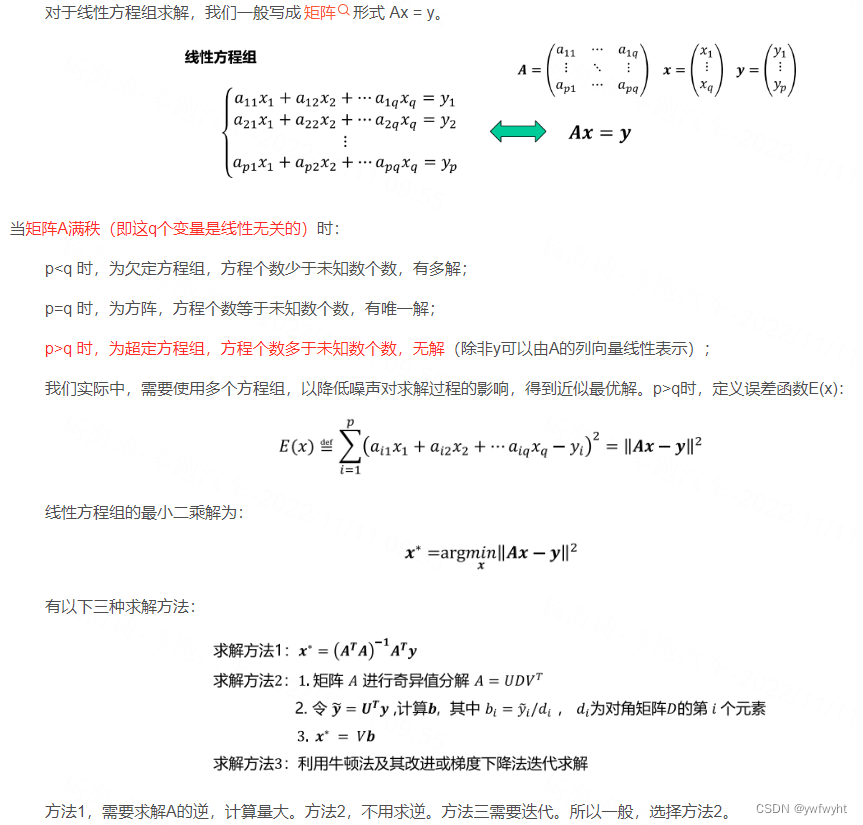
Ax = y非一致方程和一致方程的求解
一致与非一致方程
一致方程是指Ax = y有至少一个解
非一致方程指Ax = y没有解
Ax = y求解
如果A是满秩的方阵,则x = inv(A)*y
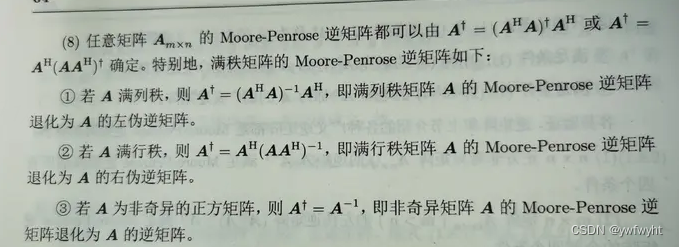
如果A不是方阵,但是是行满秩或者列满秩,那么解为A的伪逆乘以y
如果A是秩亏的,那么A的解为A的广义逆乘以y
实际上广义逆包括逆、伪逆,广义逆又称为:Moore-Penrose逆矩阵,所以Ax = y的解可以统一为A 的Moore-Penrose逆矩阵乘以y,特别的是,对于一致性方程,该解为最小范数解,对于非一致方程,该解为最小范数最小二乘解
Moore-Penrose逆矩阵
代码实现
// 拟合求系数
void line_fitting(pcl::PointCloud<pcl::PointXYZ>::Ptr &in_cloud, double &a, double&b, double&c)
{
vector<double>x, y;
int num = in_cloud->size();
for (int i = 0; i < num; i++)
{
pcl::PointXYZ p = in_cloud->at(i);
x.push_back(p.x);
y.push_back(p.y);
}
MatrixXd A(3, 3), B(3, 1), Y(3, 1);
double A01(0), A02(0), A12(0), A22(0), B00(0), B10(0), B12(0);
for (int i=0; i<num; i++)
{
A01 += x[i];
A02 += x[i] * x[i];
A12 += x[i] * x[i] * x[i];
A22 += x[i] * x[i] * x[i] * x[i];
B00 += y[i];
B10 += x[i] * y[i];
B12 += x[i] * x[i] * y[i];
}
A << num, A01, A02;
A01, A02, A12;
A02, A12, A22;
B << B00,
B10,
B12;
Y = A.inverse() * B;
a = Y(2, 0);
b = Y(1, 0);
c = Y(0, 0);
}
// rviz
void line_fitting_show(pcl::PointCloud<pcl::PointXYZ>::Ptr &in_cloud, visualization_msgs::Marker &line, double a0, double a1, double a2;
{
pcl::PointXYZ min, max;
line.lifetime = ros::Buration(0.3);
line.type = visualization_msgs::Marker::LINE_STRIP;
line.action = visualization_msgs::Marker::ADD;
line.ns = "lane";
line.id = 0;
line.scale.x = 0.2;
line.color.g = 1;
line.color.a = 1;
line.pose.orientation.w = 1;
pcl::getMinMax3D(*in_cloud, min, max);
float x_min = min.x;
float x_max = max.x;
vector<double> xx, yy;
double step = 0.5;
int step_num = std::ceil((x_max - x_min) /step);
for (int i = 0; i < step_num + 2; i++)
{
double tmp_value = x_min + i * step;
if (tmp_value > x_max)
{
tmp_value = x_max;
}
xx.push_back(tmp_value);
geometry_msgs::Point p;
p.x = tmp_value;
p.y = a0 + a1*xx[i] + a2*xx[i]*xx[i];
p.z = min.z;
line.points.push_back(p);
}
}

















 231
231











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











