







模型

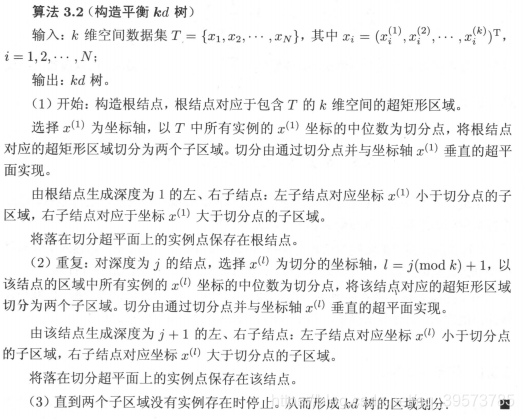
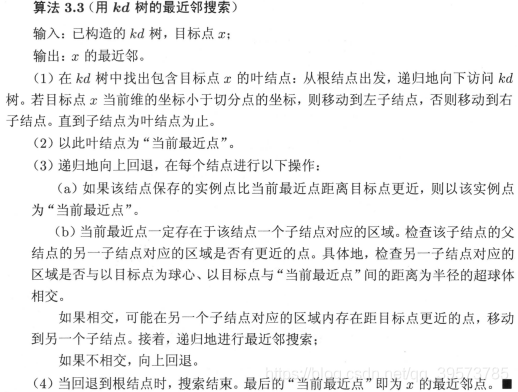
算法
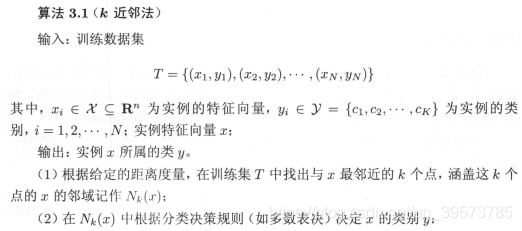

线性扫描计算耗时,当训练数据集大时效率很低。
代码实现
KNN
class KNN:
def __init__(self, X_train, y_train, n_neighbors=3, p=2):
"""
parameter: n_neighbors 临近点个数
parameter: p 距离度量
"""
self.n = n_neighbors
self.p = p
self.X_train = X_train
self.y_train = y_train
def predict(self, X):
# 取出n个点
knn_list = []
for i in range(self.n):
dist = np.linalg.norm(X - self.X_train[i], ord=self.p)
knn_list.append((dist, self.y_train[i]))
for i in range(self.n, len(self.X_train)):
max_index = knn_list.index(max(knn_list, key=lambda x: x[0]))
dist = np.linalg.norm(X - self.X_train[i], ord=self.p)
if knn_list[max_index][0] > dist:
knn_list[max_index] = (dist, self.y_train[i])
# 统计
knn = [k[-1] for k in knn_list]
count_pairs = Counter(knn)
max_count = sorted(count_pairs, key=lambda x:x)[-1]
return max_count
def score(self, X_test, y_test):
right_count = 0
n = 10
for X, y in zip(X_test, y_test):
label = self.predict(X)
if label == y:
right_count += 1
return right_count / len(X_test)kd树
# kd-tree每个结点中主要包含的数据结构如下
class KdNode(object):
def __init__(self, dom_elt, split, left, right):
self.dom_elt = dom_elt # k维向量节点(k维空间中的一个样本点)
self.split = split # 整数(进行分割维度的序号)
self.left = left # 该结点分割超平面左子空间构成的kd-tree
self.right = right # 该结点分割超平面右子空间构成的kd-tree
class KdTree(object):
def __init__(self, data):
k = len(data[0]) # 数据维度
def CreateNode(split, data_set): # 按第split维划分数据集exset创建KdNode
if not data_set: # 数据集为空
return None
# key参数的值为一个函数,此函数只有一个参数且返回一个值用来进行比较
# operator模块提供的itemgetter函数用于获取对象的哪些维的数据,参数为需要获取的数据在对象中的序号
#data_set.sort(key=itemgetter(split)) # 按要进行分割的那一维数据排序
data_set.sort(key=lambda x: x[split])
split_pos = len(data_set) // 2 # //为Python中的整数除法
median = data_set[split_pos] # 中位数分割点
split_next = (split + 1) % k # cycle coordinates
# 递归的创建kd树
return KdNode(median, split,
CreateNode(split_next, data_set[:split_pos]), # 创建左子树
CreateNode(split_next, data_set[split_pos + 1:])) # 创建右子树
self.root = CreateNode(0, data) # 从第0维分量开始构建kd树,返回根节点
# KDTree的前序遍历
def preorder(root):
print (root.dom_elt)
if root.left: # 节点不为空
preorder(root.left)
if root.right:
preorder(root.right) # 对构建好的kd树进行搜索,寻找与目标点最近的样本点:
from math import sqrt
from collections import namedtuple
# 定义一个namedtuple,分别存放最近坐标点、最近距离和访问过的节点数
result = namedtuple("Result_tuple", "nearest_point nearest_dist nodes_visited")
def find_nearest(tree, point):
k = len(point) # 数据维度
def travel(kd_node, target, max_dist):
if kd_node is None:
return result([0] * k, float("inf"), 0) # python中用float("inf")和float("-inf")表示正负无穷
nodes_visited = 1
s = kd_node.split # 进行分割的维度
pivot = kd_node.dom_elt # 进行分割的“轴”
if target[s] <= pivot[s]: # 如果目标点第s维小于分割轴的对应值(目标离左子树更近)
nearer_node = kd_node.left # 下一个访问节点为左子树根节点
further_node = kd_node.right # 同时记录下右子树
else: # 目标离右子树更近
nearer_node = kd_node.right # 下一个访问节点为右子树根节点
further_node = kd_node.left
temp1 = travel(nearer_node, target, max_dist) # 进行遍历找到包含目标点的区域
nearest = temp1.nearest_point # 以此叶结点作为“当前最近点”
dist = temp1.nearest_dist # 更新最近距离
nodes_visited += temp1.nodes_visited
if dist < max_dist:
max_dist = dist # 最近点将在以目标点为球心,max_dist为半径的超球体内
temp_dist = abs(pivot[s] - target[s]) # 第s维上目标点与分割超平面的距离
if max_dist < temp_dist: # 判断超球体是否与超平面相交
return result(nearest, dist, nodes_visited) # 不相交则可以直接返回,不用继续判断
#----------------------------------------------------------------------
# 计算目标点与分割点的欧氏距离
temp_dist = sqrt(sum((p1 - p2) ** 2 for p1, p2 in zip(pivot, target)))
if temp_dist < dist: # 如果“更近”
nearest = pivot # 更新最近点
dist = temp_dist # 更新最近距离
max_dist = dist # 更新超球体半径
# 检查另一个子结点对应的区域是否有更近的点
temp2 = travel(further_node, target, max_dist)
nodes_visited += temp2.nodes_visited
if temp2.nearest_dist < dist: # 如果另一个子结点内存在更近距离
nearest = temp2.nearest_point # 更新最近点
dist = temp2.nearest_dist # 更新最近距离
return result(nearest, dist, nodes_visited)
return travel(tree.root, point, float("inf")) # 从根节点开始递归













 4147
4147











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









