







一般情况下还真的不可以!
需要考虑的因素有以下3点:
①受抓手重量影响
一般机器人的最大可搬运重量是包含抓手重量,而抓手重量在很多情况下几乎和工件重量差不多,因此实际可搬运物体的重量可能只有3.5Kg。
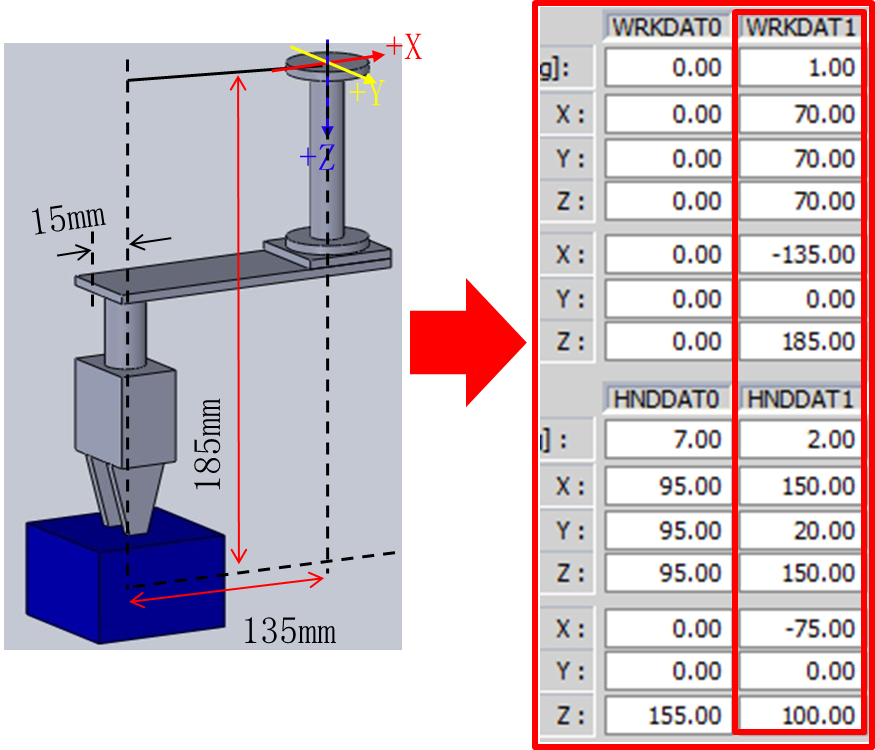
另外,如下图所示,在使用机器人之前强烈也建议设置抓手和工件的重量大小参数。
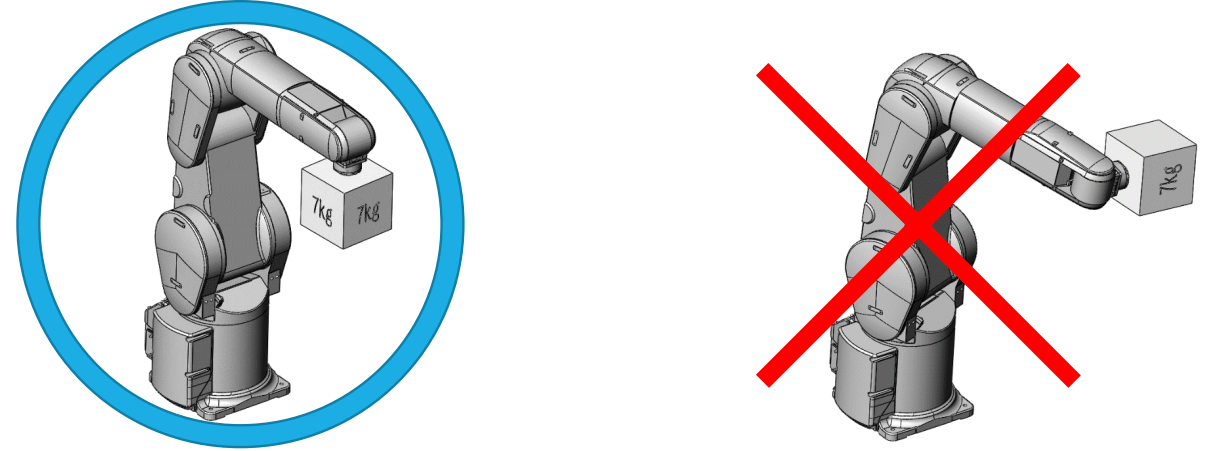
②受搬运姿势影响
一般样本上记载的最大可搬运重量为在安装法兰面朝下(垂直±10°)时的可搬运重量。而当J6轴横向时,最大可搬运重量下降至70%左右,即最大可搬运重量需要控制在5Kg以内。
③受抓手大小和重心位置影响
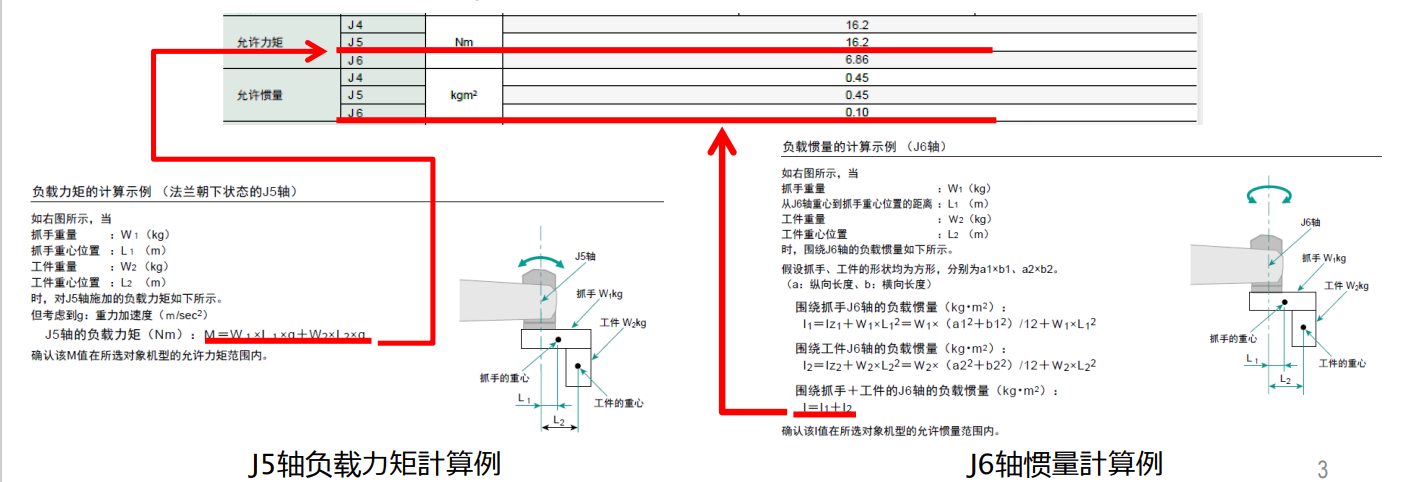
机器人规格中有力矩和允许惯量这一项。而该值的计算,如下图所示,跟负载重量、大小和重心位置均有关。工件与抓手重量的和即使为7kg,力矩和允许惯量的值超过规定值时,也需要选择大公斤数的机器人。因此,一定请预先计算。
4轴机器人:允许惯量。
6轴机器人:力矩、允许惯量。
希望以上内容可以帮助到您,您知道如何选择合适公斤数的机器人了吗?


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









