







传统的机器人互锁是指通过信号之间互锁使得一台机器人动作完成并退避到安全位置之后另一台机器人才开始动作,从而确保安全。但是当其中一台机器人速度变慢或停止时,另外一台机器人由于互锁,需要一直等待,因此整体的节拍时间会变长。
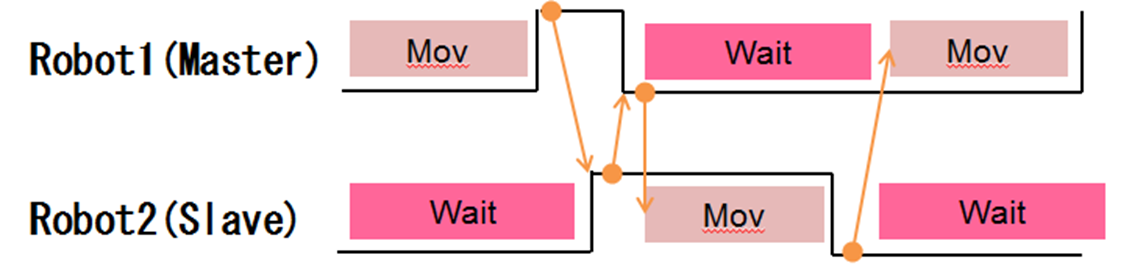
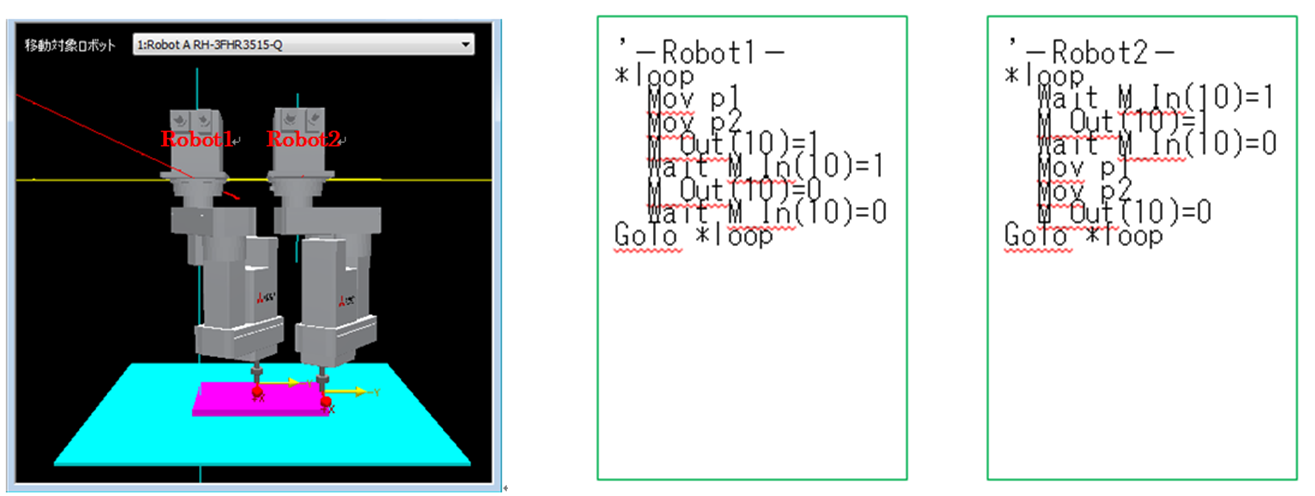
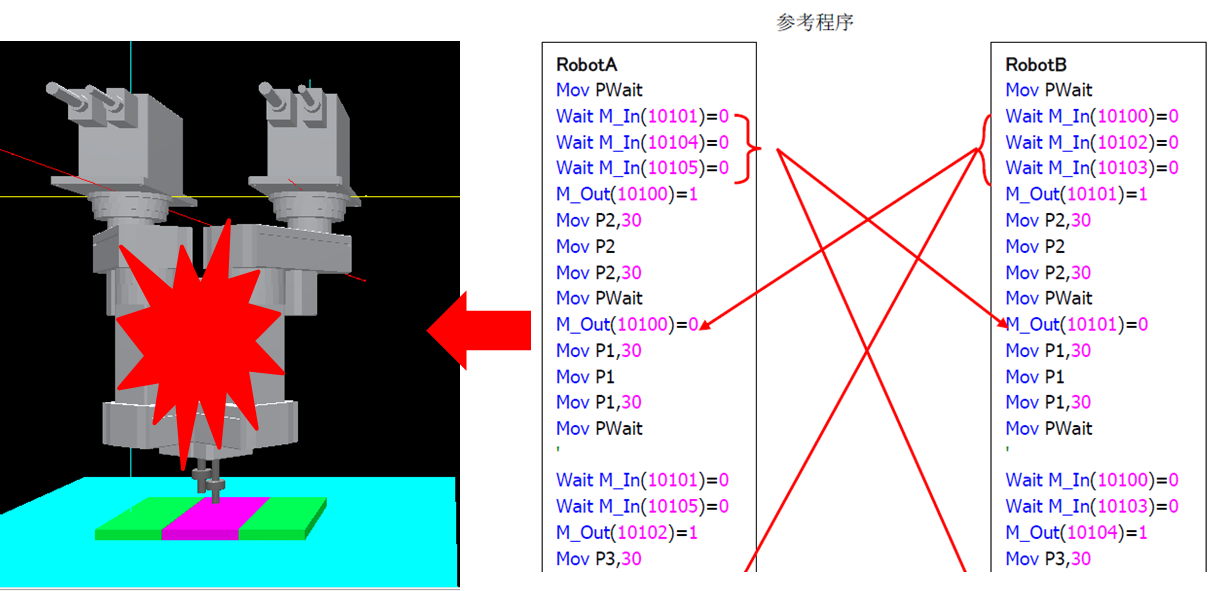
而采用单纯的信号等待方案,即每次作业前确认另一台机器人的作业状态,如果有干涉的话,就一直等待。看似该方案比较高效,其中一台机器人只要位于安全不干涉位置,另一台机器人就不受影响,可以一直高速动作。但是,当两台机器人同时进入等待位置,去确认是否可以动作时,可能出现作业可能信号同时给到两台机器人,从而造成干涉现象。
因此,本文中提出了一种安全、高效的区域互锁解决方案。该方案的核心内容如下所示:
①通过将机器人可能动作的范围划分为若干个区域,从而预测可能发生干涉的区域。在可能发生干涉的区域,使用互锁,从而确保安全。
②为了防止信号同时给入,造成可能发生的干涉,通过多任务程序,对这些信号进行顺序处理,从而避免该问题。
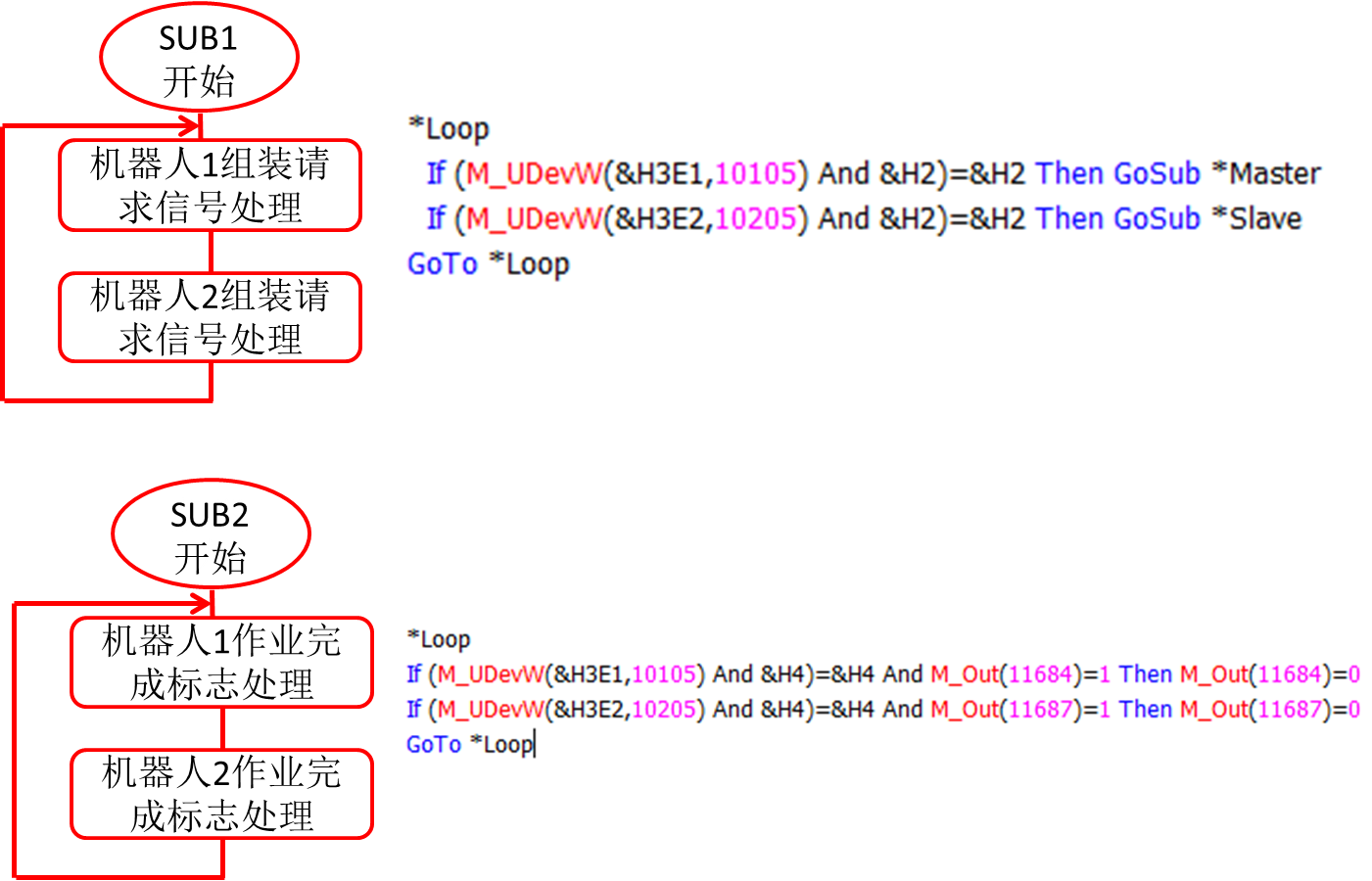
该方案流程如下所示:
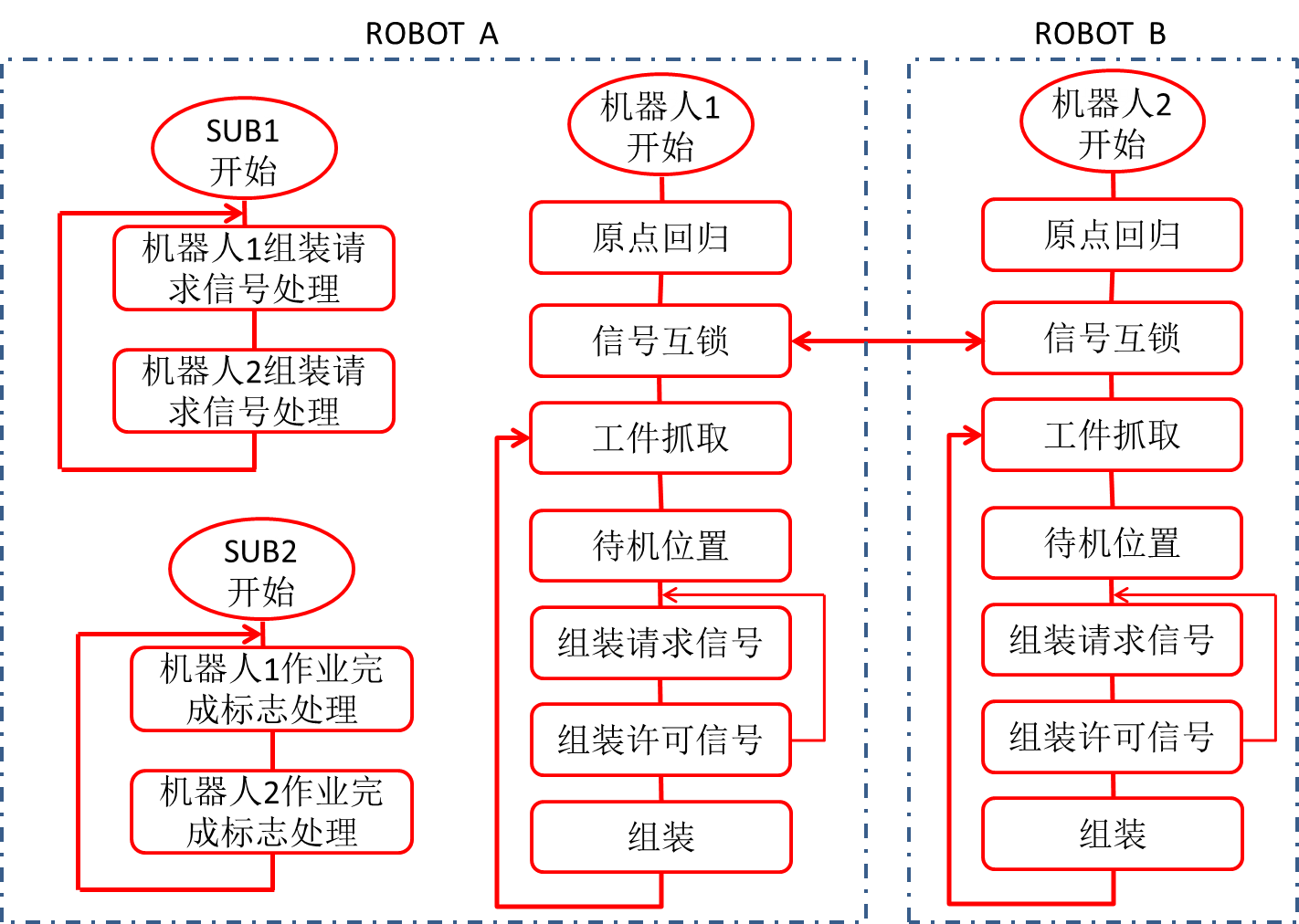
其中SUB1为请求信号处理程序,该程序顺序处理两台机器人间的作业请求信号,避免信号同时给入导致的撞机。SUB2为作业完成标志处理程序,每台机器人退出作业区域,进入到安全区域后,对作业信号中信号进行清零处理。
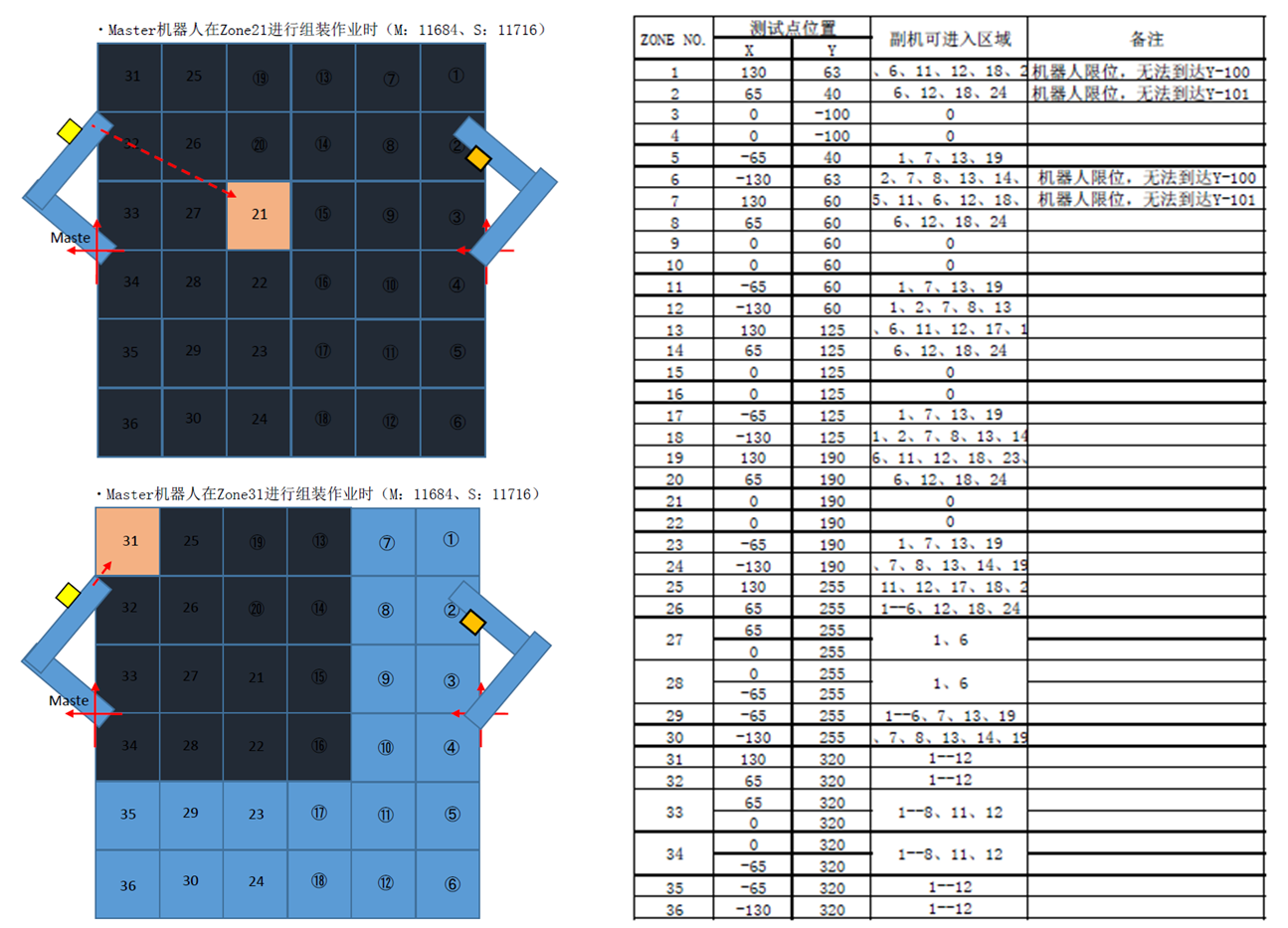
关于区域划分方式,如果作业点数较多且作为位置经常发生变化的话,可以采用如下所示方法,需要人为将整个作业空间划分很多区域并且分别确认各个作业区间是否有干涉。
如果作业点位不多,且作业位置固定的话,只需要判断相互之间可能干涉的地方,然后仅在这些有干涉的区域作业时,采用区域互锁方案,即每次作业前进行动作请求,在判断对方处于安全区域并且收到作业允许信号后,机器人才开始作业。较于相较于
互锁方案。在保证安全的基础上,提高了效率。统的互锁,提供了一种全新的互锁方案。在保证
如果你有类似的困扰的话,建议采用区域互锁方案试一下。的基础上,提高了效率。统的互锁,提供了一种全新的互锁方案。在保证安全的基提高

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









