







写在前面
本文根据官网上 tf 学习教程( http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20listener%20%28C++%29 ) 和 tf 增加一个坐标系 (http://wiki.ros.org/tf/Tutorials/Adding%20a%20frame%20%28C%2B%2B%29)
本教程完整代码见:https://download.csdn.net/download/qq_39779233/12344773
新建一个package : learning_tf
catkin_create_pkg learning_tf roscpp rospy turtlesim
一、写一个 tf broadcaster (发布者)
roscd learning_tf
learning_tf/src/turtle_tf_broadcaster.cpp 程序:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// tf广播器
static tf::TransformBroadcaster br;
// 根据乌龟当前的位姿,设置相对于世界坐标系的坐标变换
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 发布坐标变换
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化节点
ros::init(argc, argv, "my_tf_broadcaster");
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
};
turtle_name = argv[1];
// 订阅乌龟的pose信息
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
ros::spin();
return 0;
};
然后在 CMakeLists.txt 中添加如下语句:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
然后创建 launch 文件:
learning_tf/launch/start_demo.launch 程序:
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- Axes -->
<param name="scale_linear" value="2" type="double"/>
<param name="scale_angular" value="2" type="double"/>
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
</launch>
然后运行
roslaunch learning_tf start_demo.launch
并且 箭头 按键可以控制小乌龟运动。
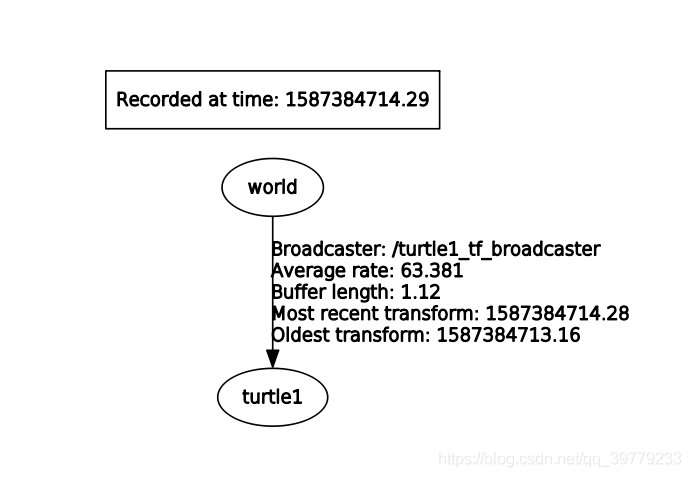
如果此时 在另一个终端输入 rosrun tf tf_echo /world /turtle1 可以查看 /world 与 /turtle1 之间的tf信息。
 如果在另一个终端输入
如果在另一个终端输入 rosrun rqt_tf_tree rqt_tf_tree 可以查看 tf tree 信息。
二、写一个 tf listener (监听者)
learning_tf/src/turtle_tf_listener.cpp 程序:
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_listener");
ros::NodeHandle node;
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok()){
tf::StampedTransform transform;
try {
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0) );
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform );
} catch (tf::TransformException ex) {
ROS_ERROR("%s",ex.what());
}
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
然后在 CMakeLists.txt 中添加如下语句:
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
然后创建 launch 文件:
learning_tf/launch/start_demo_with_listener.launch 程序:
<launch>
<!-- 启动海龟仿真器 -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 启动键盘控制 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 两只海龟的tf广播 -->
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- 监听tf广播,并且用tf控制turtle2移动 -->
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>
然后运行
roslaunch learning_tf start_demo_with_listener.launch
并且 箭头 按键可以控制小乌龟运动。并出现跟随的效果。
终端运行 rosrun tf tf_echo turtle1 turtle2 来查看 tf 转换关系的时候的问题:
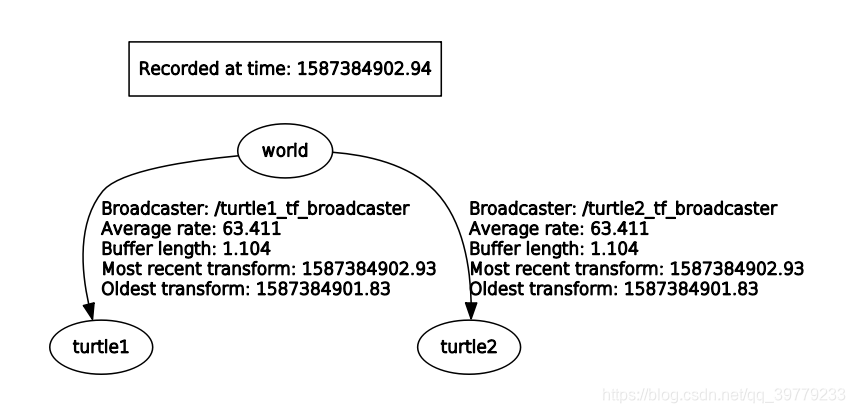
 如果在另一个终端输入
如果在另一个终端输入 rosrun rqt_tf_tree rqt_tf_tree 可以查看 tf tree 信息。
三、增加第三个坐标系
因为要增加一个坐标系,并且在这个里面起到演示作用,所以要首先把
learning_tf/src/turtle_tf_listener.cpp 中的程序:
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0) );
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform );
换成
listener.waitForTransform("/turtle2", "/carrot1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/carrot1", ros::Time(0), transform);
1.增加一个固定的坐标系 /carrot1:
编写下列程序:
learn_tf/src/frame_tf_broadcaster.cpp 程序:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok()){
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));
rate.sleep();
}
return 0;
};
然后在 CMakeLists.txt 中添加如下语句:
add_executable(frame_tf_broadcaster src/frame_tf_broadcaster.cpp)
target_link_libraries(frame_tf_broadcaster ${catkin_LIBRARIES})
然后创建 launch 文件:
learning_tf/launch/start_demo_with_listener_with_4frame.launch 程序:
<launch>
<!-- 启动海龟仿真器 -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 启动键盘控制 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 两只海龟的tf广播 -->
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- 监听tf广播,并且tf控制turtle2移动 -->
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
<node pkg="learning_tf" type="frame_tf_broadcaster"
name="broadcaster_frame" />
</launch>
然后运行
roslaunch learning_tf start_demo_with_listener_with_4frame.launch
并且 箭头 按键可以控制小乌龟运动,并出现跟随的效果。但是跟随的效果是 两个小乌龟之间始终在小乌龟的纵向相差 2m 的样子。
也就是可以理解为 第二个小乌龟一直跟随的是 /carrot1 这个坐标系,但是 /carrot1 这个坐标系和第一只小乌龟之间的关系就是始终纵向相差2m,所以最终的效果是 第二个小乌龟始终与第一个小乌龟纵向相差2m 。
2.增加一个移动的坐标系 /carrot1:
把learn_tf/src/frame_tf_broadcaster.cpp 程序中的:
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
换成
transform.setOrigin( tf::Vector3(2.0*sin(ros::Time::now().toSec()), 2.0*cos(ros::Time::now().toSec()), 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
(tip:这是一个随时间变化的坐标系)
然后编译 catkin_make 之后运行
roslaunch learning_tf start_demo_with_listener_with_4frame.launch
并且 箭头 按键可以控制小乌龟运动,并出现跟随的效果。但是跟随的效果是 第二个小乌龟始终围绕第一个小乌龟运动。
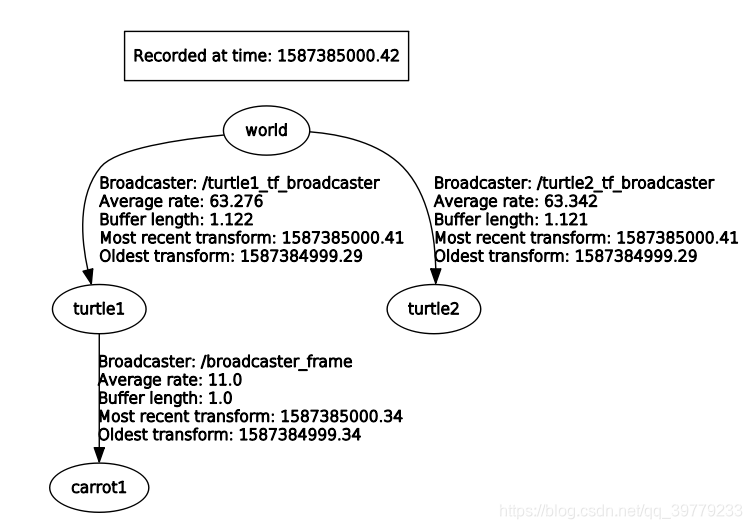
如果在另一个终端输入 rosrun rqt_tf_tree rqt_tf_tree 可以查看 tf tree 信息:















 241
241











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









