






Abstract
基于模型的重建是解决成像中各种逆问题的强大框架。近年来,在去噪问题上取得了巨大的进步,去噪这是一个逆问题的例子,其中前向模型是一个恒等算子。同样,当正向模型对应于 X 射线 CT、电子显微镜、MRI 和超声等应用中的复杂物理测量时,在改进基于模型的反演方面也取得了很大进展,仅举几例。然而,由于许多原因,将最先进的去噪算法(即先验模型)与最先进的反演方法(即正向模型)相结合一直是一个挑战。
在本文中,我们提出了一个灵活的框架,允许最先进的成像系统前向模型与最先进的先验或去噪模型相匹配。这个框架,我们称之为即插即用先验,具有显着简化软件集成的优点,此外,它允许使用最先进的不知道公式的去噪方法,作为优化问题的计算。我们通过一些简单的示例演示了如何使用即插即用先验将各种现有的去噪模型与层析前向模型混合和匹配,从而大大扩展了可能的问题解决方案的范围。
Introduction
基于模型的重建是一个强大的框架,用于解决成像中的各种逆问题,包括去噪、去模糊、断层重建和 MRI 重建。该方法通常包括为噪声测量系统描述为一个model 模型(即前向模型 forward model)和为要重建的图像描述一个model(即先验模型 prior model)。然后通过最小化平衡这两个模型的拟合的成本函数来计算重建。
近年来,在解决通常称为图像去噪 [1]、[2] 的特定逆问题方面取得了巨大进步。由于图像去噪是逆问题的最简单情况,正向模型是恒等算子,因此该领域的研究倾向于为创建新的先验模型提供肥沃的环境。事实上,最近出现了许多非常新颖和有效的图像去噪方法[1]-[7]。这些新方法已经证明,可以极大地改进以前认为可行的方法。
在这些努力的同时(In parallel with these efforts),研究人员一直在探索为从医疗扫描仪 [8] 到显微镜 [9] 的各种成像和传感系统创建正向模型的方法。 该领域的研究表明,基于模型的逆向方法可以大大提高重建图像的质量[10]。 然而,由于这项研究主要处理对大型复杂正向模型进行准确建模和解决相关优化问题的挑战,因此对结合最先进的先验模型的重视程度要低得多。因此,从高级先验建模的角度来看,基于模型的反演研究趋于落后; 此外,还没有完全受益于去噪方法的最新进展。
事实上,最近在将高级先验纳入一般逆问题方面取得了进展。 例如,基于补丁的字典先验已被用于逆问题,例如断层扫描 [11] 和 MRI [12]。 此外,虽然 BM3D [5] 去噪可能不会自然地适合作为先验公式,但 Danielyan 等人。 [13] 已经将 BM3D 用于图像去模糊的逆问题。 然而,这种方法并不直接适用于一般的逆问题。 此外,[13] 中的方法并不直接适用于使用非参数点估计框架(如 [1] 和 [7])制定的去噪算法/先验。
因此,虽然在高级先验和前向模型的集成方面取得了一些进展,但它们往往是针对问题高度定制的,目前不存在简单的turn-key的方法来匹配去噪算法作为一般逆问题的先验。
在本文中,我们提出了一个灵活的框架,用于使用去噪算法作为基于模型的反演的先验。这个框架,我们称之为即插即用先验,具有简化软件集成的优点,此外,它允许使用未明确表示为优化问题的最先进的去噪方法。
我们提出的即插即用框架是基于乘法器交替方向法 (ADMM) 的直接应用,ADMM最近已流行用于解决各种 MAP 估计/正则化逆问题。
我们的 ADMM 应用通过首先拆分状态变量来解耦 MAP 估计问题的先验和前向模型项。将 ADMM 技术应用于产生的约束最小化问题会导致两种解耦优化,一种用于前向模型,一种用于先验模型。我们注意到,这允许完全解耦的软件实现,其中一个模块对应于仅依赖于先验的去噪算法,而第二个模块对应于基于模型的反演,其中 l2 正则化仅依赖于前向模型。 重要的是,我们凭经验证明,即使不知道与先验模型对应的显式函数,该框架也可用于解决重建问题。
II. MAP COST FUNCTION FOR SOLVING INVERSE PROBLEMS
假设 y 是一个 M × 1 的测量向量,我们希望从中估计未知的 x,一个 N × 1 的向量。设 p(y|x) 是给定 x 的测量值 y 的条件概率密度函数 (pdf),p(x) 是未知数的 pdf,则 x 的 MAP 估计由下式给出
在特殊情况下

MAP 估计对应于旨在去除方差 σ2n 的加性高斯白噪声的去噪。 对于这种特殊情况,我们将 H(y; σ2n) 定义为当信号 y 被方差 σ2n 的加性高斯噪声破坏时对信号 y 进行去噪的算子。 该算子由以下 MAP 优化问题的解给出:

有时,有一个额外的正则化参数来控制先前模型对重建的相对影响是有用的。 为了允许这种额外的控制,我们可以将估计问题重写为

其中 β 可用于调节应用于反演的正则化量。 请注意,当 β = 1 时,问题正是 MAP 估计问题 (1)。
III. VARIABLE SPLITTING AND ADMM
为了设计(3)的算法来解耦前向和先验项,我们首先将变量 x 分成两个新变量 x 和 v,并将方程(3)重新表述为以下约束优化问题 [15]。

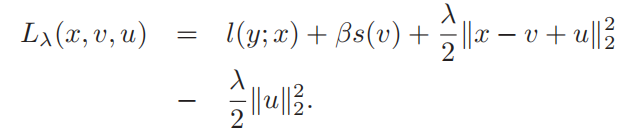
然后,我们通过形成增强的拉格朗日函数并使用 ADMM 技术 [14] 来解决 (4)。 这个问题的增广拉格朗日由下式给出
中间不再翻译
最后我们注意到,在本文中,我们不讨论即插即用框架的理论收敛特性。
虽然如果 l 和 s 是凸函数、闭函数和适当函数并且 L0 具有鞍点 [14],则 ADMM 可以保证收敛,但我们通过数值实验观察到,用不明确对应于凸函数 s 的去噪算法代替 H 甚至是严格的优化问题,仍然会产生稳定的结果。 因此,我们依靠实验中的经验证据来证明我们的框架产生了稳定的结果。
IV. EXPERIMENTAL RESULTS
在本文中,我们将模拟限制在
,A 是断层正投影仪,Λ 是对角加权矩阵的情况。我们将试验各种最先进的 去噪技术,这些技术可能会或可能不会被明确地表述为正则化优化框架中的先验模型。我们在 64 × 64 Shepp-Logan 模型上评估我们的方法,其值在 0 - 255 之间缩放。模型在 -70° 和 +70° 之间的 141 个视图上正向投影,并添加噪声以模拟泊松统计(方差设置为相等平均而言)。我们通过试验六种不同的去噪技术/先验来比较使用即插即用先验框架的重建 - K-SVD [4]、BM3D [5]、PLOW [7]、总变异 (TV) [21]、q- GGMRF [22] 和离散重建 (DR) [23]。调整正则化参数 β 以实现重建和模型之间的最小均方根误差 (RMSE)。 K-SVD 和 BM3D 的补丁大小设置为 4×4,PLOW 的补丁大小设置为 5×5。我们没有在 ADMM 循环中使用简化的重建算子 F,而是使用近似算子 F~,它使用随机顺序的迭代坐标下降 (ICD) [24] 的 NIter 次迭代来降低与 F 对应的成本函数的值更新 [8]。该算法使用过滤的反投影重建进行初始化。对于除 DR 先验之外的所有算法,NIter 的值都设置为 1,在这种情况下,对于第一次外部迭代,它设置为 20。
对于所有实验,λ 的值设置为 1/20。由于 DR 先验是非凸的,我们观察到 λ 的值会影响最终解决方案。在离散重建先验的情况下,级别的数量设置为 6 - 原始模型中存在的数量。















 1600
1600











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









