







一,目录

二,代码
main.c
#include "stm32f10x.h"
#include "bsp_uart.h"
#include "bsp_esp01s.h"
#include "bsp_SysTick.h"
int main(void)
{
char* ESP3201S_PORT_REV;
//设置NVIC组
NVIC_SetPriorityGrouping(NVIC_PriorityGroup_2);
//初始化USART1和USART2
SysTick_Init();
ESP01S_Init();
while(1)
{
if(getESP3201S_PORT_REV_flag()==1)
{
ESP3201S_PORT_REV = getESP3201S_PORT_REV();
//把ESP01S来的数据发送给PC
Serial_SendString(DEBUG_PORT,ESP3201S_PORT_REV);
ESP_CLEAR_REV_BUFF();
}
}
}
bsp_uart.h
#ifndef __BSP_UART_H__
#define __BSP_UART_H__
#include "stm32f10x.h"
usart1数据缓冲
//extern uint8_t USART1_REV[100];
usart2数据缓冲
//extern uint8_t USART2_REV[100];
usart1数据个数
//extern uint8_t usart1_index;
usart2数据个数
//extern uint8_t usart2_index;
usart1数据接受完成标志位
//extern uint8_t usart1_flag;
usart2数据接受完成标志位
//extern uint8_t usart2_flag;
/**
USARTx (x......1.2.3.4.5)
USART_BaudRate
USART_WordLength USART_WordLength_8b/USART_WordLength_9b
USART_StopBits USART_StopBits_1/USART_StopBits_0_5/USART_StopBits_2/USART_StopBits_1_5
USART_Parity USART_Parity_No/USART_Parity_Even/USART_Parity_Odd
USART_IT
* This parameter can be one of the following values:
* @arg USART_IT_CTS: CTS change interrupt (not available for UART4 and UART5)
* @arg USART_IT_LBD: LIN Break detection interrupt
* @arg USART_IT_TXE: Tansmit Data Register empty interrupt
* @arg USART_IT_TC: Transmission complete interrupt
* @arg USART_IT_RXNE: Receive Data register not empty interrupt
* @arg USART_IT_IDLE: Idle line detection interrupt
* @arg USART_IT_ORE: OverRun Error interrupt
* @arg USART_IT_NE: Noise Error interrupt
* @arg USART_IT_FE: Framing Error interrupt
* @arg USART_IT_PE: Parity Error interrupt
*/
void BSP_UART_Init(USART_TypeDef* USARTx,
uint8_t NVIC_PRE_Priority,
uint8_t NVIC_SUB_Priority,
uint32_t USART_BaudRate,
uint16_t USART_WordLength,
uint16_t USART_StopBits,
uint16_t USART_Parity);
void Serial_SendByte(USART_TypeDef* USARTx,uint8_t Byte);
void Serial_SendArray(USART_TypeDef* USARTx,uint8_t *Array, uint16_t Length);
void Serial_SendString(USART_TypeDef* USARTx,char *String);
void DEBUG_USART12_TO_USART21(void);
void Clear_Buff(char* BUFF_DATA,uint8_t index);
#endif /** __BSP_UART_H__ */
bsp_uart.c
#include "bsp_uart.h"
/**
USARTx (x......1.2.3.4.5)
USART_BaudRate
USART_WordLength USART_WordLength_8b/USART_WordLength_9b
USART_StopBits USART_StopBits_1/USART_StopBits_0_5/USART_StopBits_2/USART_StopBits_1_5
USART_Parity USART_Parity_No/USART_Parity_Even/USART_Parity_Odd
*/
void BSP_UART_Init(USART_TypeDef* USARTx,
uint8_t NVIC_PRE_Priority,
uint8_t NVIC_SUB_Priority,
uint32_t USART_BaudRate,
uint16_t USART_WordLength,
uint16_t USART_StopBits,
uint16_t USART_Parity)
{
GPIO_TypeDef* USART_GPIOx;
uint32_t RCC_UARTx_PORT_CLK;
uint32_t RCC_UARTx_CLK;
uint16_t USARTx_PIN_TX;
uint16_t USARTx_PIN_RX;
IRQn_Type NVIC_USARTx_IRQn;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
if(USARTx==USART1)
{
USART_GPIOx = GPIOA;
USARTx_PIN_TX = GPIO_Pin_9;
USARTx_PIN_RX = GPIO_Pin_10;
NVIC_USARTx_IRQn = USART1_IRQn;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
}else if(USARTx==USART2)
{
USART_GPIOx = GPIOA;
RCC_UARTx_PORT_CLK = RCC_APB2Periph_GPIOA;
RCC_UARTx_CLK = RCC_APB1Periph_USART2;
USARTx_PIN_TX = GPIO_Pin_2;
USARTx_PIN_RX = GPIO_Pin_3;
NVIC_USARTx_IRQn = USART2_IRQn;
}else if(USARTx==USART3)
{
USART_GPIOx = GPIOB;
RCC_UARTx_PORT_CLK = RCC_APB2Periph_GPIOB;
RCC_UARTx_CLK = RCC_APB1Periph_USART3;
USARTx_PIN_TX = GPIO_Pin_10;
USARTx_PIN_RX = GPIO_Pin_11;
NVIC_USARTx_IRQn = USART3_IRQn;
}else if(USARTx==UART4)
{
USART_GPIOx = GPIOC;
RCC_UARTx_PORT_CLK = RCC_APB2Periph_GPIOC;
RCC_UARTx_CLK = RCC_APB1Periph_USART3;
USARTx_PIN_TX = GPIO_Pin_10;
USARTx_PIN_RX = GPIO_Pin_11;
NVIC_USARTx_IRQn = UART4_IRQn;
}else if(USARTx==UART5)
{
USARTx_PIN_TX = GPIO_Pin_12;
USARTx_PIN_RX = GPIO_Pin_2;
NVIC_USARTx_IRQn = UART5_IRQn;
}
if(USARTx!=USART1&&USARTx!=UART5)
{
RCC_APB1PeriphClockCmd(RCC_UARTx_CLK,ENABLE);
RCC_APB2PeriphClockCmd(RCC_UARTx_PORT_CLK,ENABLE);
}else if(USARTx==UART5)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART5,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = USARTx_PIN_TX;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = USARTx_PIN_RX;
GPIO_Init(GPIOD,&GPIO_InitStructure);
}
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = USARTx_PIN_TX;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USART_GPIOx,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = USARTx_PIN_RX;
GPIO_Init(USART_GPIOx,&GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = USART_BaudRate;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;
USART_InitStructure.USART_Parity = USART_Parity;
USART_InitStructure.USART_StopBits = USART_StopBits;
USART_InitStructure.USART_WordLength = USART_WordLength;
USART_Init(USARTx,&USART_InitStructure);
//开启接收非空中断和空闲中断
USART_ITConfig(USARTx,USART_IT_RXNE,ENABLE);
USART_ITConfig(USARTx,USART_IT_IDLE,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = NVIC_USARTx_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = NVIC_PRE_Priority;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = NVIC_SUB_Priority;
NVIC_Init(&NVIC_InitStructure);
//使能串口
USART_Cmd(USARTx, ENABLE);
}
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(USART_TypeDef* USARTx,uint8_t Byte)
{
USART_SendData(USARTx, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USARTx,USART_FLAG_TXE)==RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(USART_TypeDef* USARTx,uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(USARTx,Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(USART_TypeDef* USARTx,char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(USARTx,String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
void Clear_Buff(char* BUFF_DATA,uint8_t index)
{
uint8_t i=0;
while(i<(index))
{
BUFF_DATA[i]='\0';
i++;
}
}
bsp_SysTick.h
#ifndef __SYSTICK_H
#define __SYSTICK_H
#include "stm32f10x.h"
void SysTick_Init(void);
void Delay_us(__IO u32 nTime);
#define Delay_ms(x) Delay_us(100*x) //单位ms
void SysTick_Delay_Us( __IO uint32_t us);
void SysTick_Delay_Ms( __IO uint32_t ms);
#endif /* __SYSTICK_H */
bsp_SysTick.c
#include "bsp_SysTick.h"
#include "core_cm3.h"
#include "misc.h"
static __IO u32 TimingDelay;
/**
* @brief 启动系统滴答定时器 SysTick
* @param 无
* @retval 无
*/
void SysTick_Init(void)
{
/* SystemFrequency / 1000 1ms中断一次
* SystemFrequency / 100000 10us中断一次
* SystemFrequency / 1000000 1us中断一次
*/
// if (SysTick_Config(SystemFrequency / 100000)) // ST3.0.0库版本
if (SysTick_Config(SystemCoreClock / 100000)) // ST3.5.0库版本
{
/* Capture error */
while (1);
}
}
/**
* @brief us延时程序,10us为一个单位
* @param
* @arg nTime: Delay_us( 1 ) 则实现的延时为 1 * 10us = 10us
* @retval 无
*/
void Delay_us(__IO u32 nTime)
{
TimingDelay = nTime;
// 使能滴答定时器
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
while(TimingDelay != 0);
}
/**
* @brief 获取节拍程序
* @param 无
* @retval 无
* @attention 在 SysTick 中断函数 SysTick_Handler()调用
*/
void TimingDelay_Decrement(void)
{
if (TimingDelay != 0x00)
{
TimingDelay--;
}
}
#if 0
// 这个 固件库函数 在 core_cm3.h中
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
// reload 寄存器为24bit,最大值为2^24
if (ticks > SysTick_LOAD_RELOAD_Msk) return (1);
// 配置 reload 寄存器的初始值
SysTick->LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1;
// 配置中断优先级为 1<<4-1 = 15,优先级为最低
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
// 配置 counter 计数器的值
SysTick->VAL = 0;
// 配置systick 的时钟为 72M
// 使能中断
// 使能systick
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
return (0);
}
#endif
// couter 减1的时间 等于 1/systick_clk
// 当counter 从 reload 的值减小到0的时候,为一个循环,如果开启了中断则执行中断服务程序,
// 同时 CTRL 的 countflag 位会置1
// 这一个循环的时间为 reload * (1/systick_clk)
void SysTick_Delay_Us( __IO uint32_t us)
{
uint32_t i;
SysTick_Config(SystemCoreClock/1000000);
for(i=0;i<us;i++)
{
// 当计数器的值减小到0的时候,CRTL寄存器的位16会置1
while( !((SysTick->CTRL)&(1<<16)) );
}
// 关闭SysTick定时器
SysTick->CTRL &=~SysTick_CTRL_ENABLE_Msk;
}
void SysTick_Delay_Ms( __IO uint32_t ms)
{
uint32_t i;
SysTick_Config(SystemCoreClock/1000);
for(i=0;i<ms;i++)
{
// 当计数器的值减小到0的时候,CRTL寄存器的位16会置1
// 当置1时,读取该位会清0
while( !((SysTick->CTRL)&(1<<16)) );
}
// 关闭SysTick定时器
SysTick->CTRL &=~ SysTick_CTRL_ENABLE_Msk;
}
/*********************************************END OF FILE**********************/
bsp_esp01s.h
#ifndef __BSP_ESP01S_H__
#define __BSP_ESP01S_H__
#include "stm32f10x.h"
/**
uart1 tx:PA9 RX:PA10
uart2 tx:PA2 RX:PA3
uart2连接wifi作为通讯端口
esp01s stm32f103vct6
3.3v 3.3v
tx PA3
rx PA2
gnd gnd
uart1作为调试端口
*/
#define ESP3201S_PORT USART2
#define DEBUG_PORT USART1
typedef enum{
CWMODE_ERROR=1,
RST_ERROR = 2,
CWJAP_ERROR=3,
CIPSTART_ERROR=4,
CIPMUX_ERROR=5
}CMD_ERROR_TypeDef;
void ESP01S_Init(void);
void DEBUG_EPS01S(void);
uint8_t getESP3201S_PORT_REV_index(void);
uint8_t getESP3201S_PORT_REV_flag(void);
char* getESP3201S_PORT_REV(void);
void setESP3201S_PORT_REV_index(uint8_t ESP3201S_PORT_REV_index);
void setESP3201S_PORT_REV_flag(uint8_t ESP3201S_PORT_REV_flag);
void ESP_CLEAR_REV_BUFF(void);
#endif /** __BSP_ESP01S_H__ */
bsp_esp01s.c
#include "bsp_esp01s.h"
#include "bsp_uart.h"
#include "string.h"
#include "bsp_SysTick.h"
//#define CIPSTART_MAKER(PROTOCOL,SERVER_HOST,PORT) ("AT+CIPSTART="##PROTOCOL##","##"SERVER_HOST"##","##PORT##"\r\n")
//usart1数据缓冲
char DEBUG_PORT_REV[100];
//usart2数据缓冲
char ESP3201S_PORT_REV[100];
//usart1数据个数
uint8_t DEBUG_PORT_REV_index = 0;
//usart2数据个数
uint8_t ESP3201S_PORT_REV_index = 0;
//usart1数据接受完成标志位
uint8_t DEBUG_PORT_REV_flag = 0;
//usart2数据接受完成标志位
uint8_t ESP3201S_PORT_REV_flag = 0;
//ESP01s初始化步骤控制标识符 0进入错误处理函数,1继续下一步
uint8_t NEXT_STEP_FLAG = 1;
//ERROR_CODE为0表示没有错误,其他表示有错
uint8_t ERROR_CODE;
uint8_t ESP_INIT_COMPLETE_FLAG=0;
//查询到的信息缓冲区
char* GET_INFO;
char* temp;
char* CMD_CWMODE = "AT+CWMODE=1\r\n";
char* CMD_RST = "AT+RST\r\n";
char* CMD_CWJAP = "AT+CWJAP=\"lemontreexxxx\",\"xxxxxxxxxxxx\"\r\n";
char* CMD_CWJAP1 = "WIFI CONNECTED";
char* CMD_CWJAP2="AT+CWJAP?\r\n";
char* CMD_CIFSR = "AT+CIFSR\r\n";
char* CMD_CIPMUX = "AT+CIPMUX=0\r\n";
char* CMD_CIPSTART = "AT+CIPSTART=\"TCP\",\"192.168.2.2\",8080\r\n";
char* CMD_CIPMODE = "AT+CIPMODE=0\r\n";
char* CMD_CIPSTATUS = "AT+CIPSTATUS\r\n";
char* itoa(int num,char* str,int radix);
uint8_t ESP3201S_Cmd(char* cmd,uint8_t (*VerifyFunction)(uint32_t),uint32_t ms);
uint8_t ESP3201S_ONE_ANSWER_VerifyFunction(uint32_t ms);
char* ESP3201S_getInformation(char* cmd,char* (*getFunction)(void));
char* getCWJAP(void);
char* getCIFSR(void);
char* getCIPSTATUS(void);
void ESP_CLEAR_REV_BUFF(void);
void ESP01S_Init(void)
{
BSP_UART_Init(DEBUG_PORT,2,2,115200,USART_WordLength_8b,USART_StopBits_1,USART_Parity_No);
BSP_UART_Init(ESP3201S_PORT,2,2,115200,USART_WordLength_8b,USART_StopBits_1,USART_Parity_No);
SysTick_Delay_Ms(3000);
if(NEXT_STEP_FLAG)
{
//设置station模式 AT+CWMODE=
ESP3201S_Cmd(CMD_CWMODE,ESP3201S_ONE_ANSWER_VerifyFunction,50);
if(ERROR_CODE==0)
Serial_SendString(DEBUG_PORT,"ESP设置station模式成功\r\n");
}
if(NEXT_STEP_FLAG)
{
//重启eps模块 AT+RST
ESP3201S_Cmd(CMD_RST,ESP3201S_ONE_ANSWER_VerifyFunction,6000);
if(ERROR_CODE==0)
Serial_SendString(DEBUG_PORT,"ESP_REST_SUCCESS\r\n");
}
if(NEXT_STEP_FLAG)
{
//连接wifi AT+CWJAP="xxxxxxxxxxxxx","xxxxxxxxxxxxx"
ESP3201S_Cmd(CMD_CWJAP,ESP3201S_ONE_ANSWER_VerifyFunction,10000);
}
if(NEXT_STEP_FLAG)
{
//测试是否获取到IP,以验证连接wifi是否正常
ERROR_CODE=ESP3201S_Cmd(CMD_CIFSR,ESP3201S_ONE_ANSWER_VerifyFunction,1000);
}
if(NEXT_STEP_FLAG)
{
//设置单链接模式
ERROR_CODE=ESP3201S_Cmd(CMD_CIPMUX,ESP3201S_ONE_ANSWER_VerifyFunction,1000);
}
if(NEXT_STEP_FLAG)
{
//连接服务器
ERROR_CODE=ESP3201S_Cmd(CMD_CIPSTART,ESP3201S_ONE_ANSWER_VerifyFunction,6000);
ESP_INIT_COMPLETE_FLAG=1;
}
if((ERROR_CODE==0)&&ESP_INIT_COMPLETE_FLAG)
{
Serial_SendString(DEBUG_PORT,"ESP3201s初始化完毕\r\nCWJAP:");
Serial_SendString(DEBUG_PORT,ESP3201S_getInformation(CMD_CWJAP2,getCWJAP));
Serial_SendString(DEBUG_PORT,ESP3201S_getInformation(CMD_CIFSR,getCIFSR));
Serial_SendString(DEBUG_PORT,ESP3201S_getInformation(CMD_CIPSTATUS,getCIPSTATUS));
}else
{
Serial_SendString(DEBUG_PORT,"ESP3201s_init_error \r\n");
}
}
void ESP_CLEAR_REV_BUFF(void)
{
Clear_Buff(ESP3201S_PORT_REV,100);
ESP3201S_PORT_REV_index = 0;
ESP3201S_PORT_REV_flag = 0;
}
char* getCWJAP(void)
{
strtok(ESP3201S_PORT_REV,":");
GET_INFO=strtok(NULL,",");
return GET_INFO;
}
char* getCIFSR(void)
{
GET_INFO = ESP3201S_PORT_REV;
return ESP3201S_PORT_REV;
}
char* getCIPSTATUS(void)
{
GET_INFO = ESP3201S_PORT_REV;
return ESP3201S_PORT_REV;
}
uint8_t ESP3201S_Cmd(char* cmd,uint8_t (*VerifyFunction)(uint32_t),uint32_t ms)
{
ESP_CLEAR_REV_BUFF();
if(strlen(cmd)!=0)
{
Serial_SendString(ESP3201S_PORT,cmd);
}
ERROR_CODE = VerifyFunction(ms);
return ERROR_CODE;
}
//ESP只进行一次应答的命令校验
uint8_t ESP3201S_ONE_ANSWER_VerifyFunction(uint32_t ms)
{
char* cmd_toke;
SysTick_Delay_Ms(ms);
while(ESP3201S_PORT_REV_flag!=1);
if(strstr(ESP3201S_PORT_REV,"OK"))
{
cmd_toke = strtok(ESP3201S_PORT_REV,"\r\n");
NEXT_STEP_FLAG = 1;
Serial_SendString(DEBUG_PORT,strcat(cmd_toke," execute success\r\n"));
return 0;
}else
{
NEXT_STEP_FLAG = 0;
cmd_toke = strtok(ESP3201S_PORT_REV,"\r\n");
Serial_SendString(DEBUG_PORT,strcat(cmd_toke," execute fail\r\n"));
return 100;
}
}
char* ESP3201S_getInformation(char* cmd,char* (*getFunction)(void))
{
ESP_CLEAR_REV_BUFF();
if(strlen(cmd)!=0)
{
Serial_SendString(ESP3201S_PORT,cmd);
}
while(ESP3201S_PORT_REV_flag!=1);
if(strstr(ESP3201S_PORT_REV,"OK"))
{
NEXT_STEP_FLAG = 1;
getFunction();
return GET_INFO;
}else
{
NEXT_STEP_FLAG = 0;
return 0;
}
}
char* itoa(int num,char* str,int radix)
{
char temp;//临时变量,交换两个值时用到
char index[]="0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ";//索引表
unsigned unum;//存放要转换的整数的绝对值,转换的整数可能是负数
int i=0,j,k;//i用来指示设置字符串相应位,转换之后i其实就是字符串的长度;转换后顺序是逆序的,有正负的情况,k用来指示调整顺序的开始位置;j用来指示调整顺序时的交换。
//获取要转换的整数的绝对值
if(radix==10&&num<0)//要转换成十进制数并且是负数
{
unum=(unsigned)-num;//将num的绝对值赋给unum
str[i++]='-';//在字符串最前面设置为'-'号,并且索引加1
}
else unum=(unsigned)num;//若是num为正,直接赋值给unum
//转换部分,注意转换后是逆序的
do
{
str[i++]=index[unum%(unsigned)radix];//取unum的最后一位,并设置为str对应位,指示索引加1
unum/=radix;//unum去掉最后一位
}while(unum);//直至unum为0退出循环
str[i]='\0';//在字符串最后添加'\0'字符,c语言字符串以'\0'结束。
//将顺序调整过来
if(str[0]=='-') k=1;//如果是负数,符号不用调整,从符号后面开始调整
else k=0;//不是负数,全部都要调整
for(j=k;j<=(i-1)/2;j++)//头尾一一对称交换,i其实就是字符串的长度,索引最大值比长度少1
{
temp=str[j];//头部赋值给临时变量
str[j]=str[i-1+k-j];//尾部赋值给头部
str[i-1+k-j]=temp;//将临时变量的值(其实就是之前的头部值)赋给尾部
}
return str;//返回转换后的字符串
}
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(DEBUG_PORT,USART_IT_RXNE)!=RESET)
{
DEBUG_PORT_REV[DEBUG_PORT_REV_index++]=USART_ReceiveData(DEBUG_PORT);
}
if(DEBUG_PORT_REV_index>99)
{
DEBUG_PORT_REV_index=99;
}
if(USART_GetITStatus(DEBUG_PORT,USART_IT_IDLE)!=RESET)
{
DEBUG_PORT->SR; //读取SR寄存器
DEBUG_PORT->DR; //读取DR寄存器 (先读USART_SR,然后读USART_DR可以清除空闲中断标志位IDLE)
DEBUG_PORT_REV_flag=1;
}
}
void USART2_IRQHandler(void)
{
if(USART_GetITStatus(ESP3201S_PORT,USART_IT_RXNE)!=RESET)
{
ESP3201S_PORT_REV[ESP3201S_PORT_REV_index++]=USART_ReceiveData(ESP3201S_PORT);
}
if(ESP3201S_PORT_REV_index>99)
{
ESP3201S_PORT_REV_index=99;
}
if(USART_GetITStatus(ESP3201S_PORT,USART_IT_IDLE)!=RESET)
{
ESP3201S_PORT->SR; //读取SR寄存器
ESP3201S_PORT->DR; //读取DR寄存器 (先读USART_SR,然后读USART_DR可以清除空闲中断标志位IDLE)
ESP3201S_PORT_REV_flag=1; //置1数据接收完成标志位
}
}
void DEBUG_USART12_TO_USART21(void)
{
if(DEBUG_PORT_REV_flag==1)
{
//把PC发来的数据发送到ESP01S
Serial_SendString(ESP3201S_PORT,DEBUG_PORT_REV);
//清除DEBUG_PORT_REV数据缓冲,方便下次使用
Clear_Buff(DEBUG_PORT_REV,DEBUG_PORT_REV_index);
DEBUG_PORT_REV_index=0;
//清除接收完成标志位
DEBUG_PORT_REV_flag=0;
}
if(ESP3201S_PORT_REV_flag==1)
{
//把ESP01S来的数据发送给PC
Serial_SendString(DEBUG_PORT,ESP3201S_PORT_REV);
Clear_Buff(ESP3201S_PORT_REV,ESP3201S_PORT_REV_index);
ESP3201S_PORT_REV_index=0;
ESP3201S_PORT_REV_flag=0;
}
}
uint8_t getDEBUG_PORT_REV_index(void)
{
if(DEBUG_PORT_REV_flag==1)
{
return DEBUG_PORT_REV_index;
}else
{
return 0;
}
}
uint8_t getESP3201S_PORT_REV_index(void)
{
if(ESP3201S_PORT_REV_flag==1)
{
return ESP3201S_PORT_REV_index;
}else
{
return 0;
}
}
uint8_t getDEBUG_PORT_REV_flag(void)
{
return DEBUG_PORT_REV_flag;
}
uint8_t getESP3201S_PORT_REV_flag(void)
{
return ESP3201S_PORT_REV_flag;
}
void setESP3201S_PORT_REV_flag(uint8_t ESP3201S_PORT_REV_flag)
{
ESP3201S_PORT_REV_flag=ESP3201S_PORT_REV_flag;
}
void setESP3201S_PORT_REV_index(uint8_t ESP3201S_PORT_REV_index)
{
ESP3201S_PORT_REV_index = ESP3201S_PORT_REV_index;
}
char* getESP3201S_PORT_REV(void)
{
if(ESP3201S_PORT_REV_flag)
{
strcpy(temp,ESP3201S_PORT_REV);
return ESP3201S_PORT_REV;
}else
{
return "";
}
}
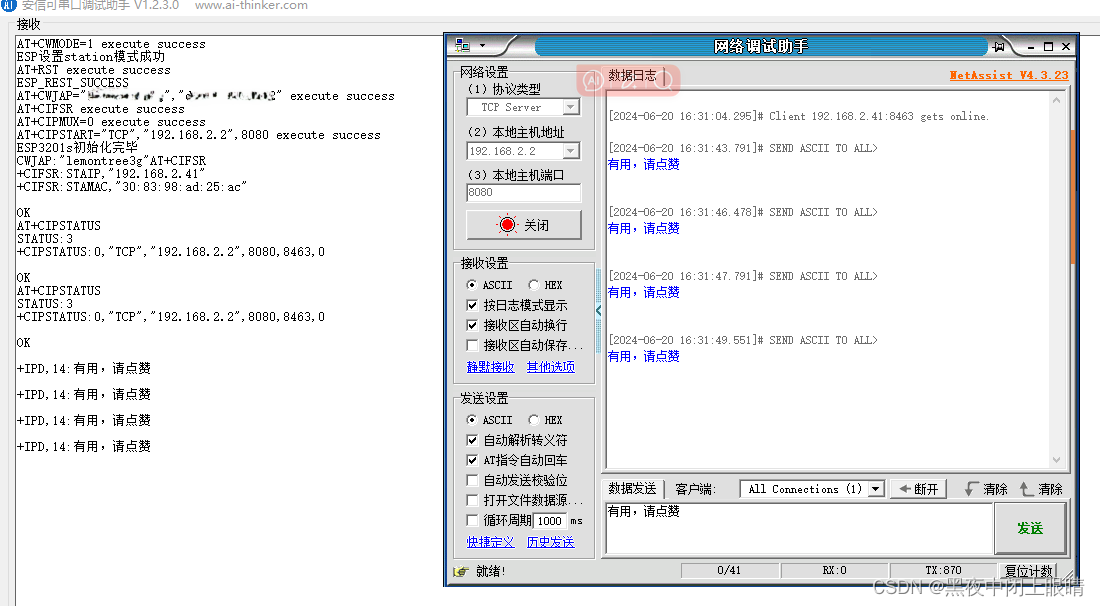
三,结果















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









