







1.硬件资源
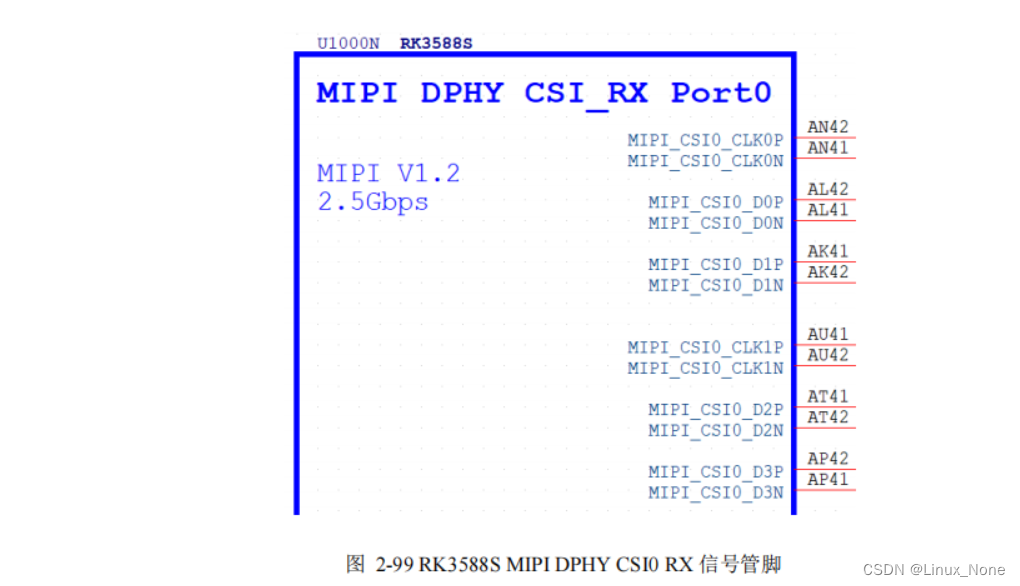
1.1 MIPI DPHY CSI RX 接口
RK3588S 有 1 个 MIPI DPHY CSI RX,都支持 MIPI V1.2 版本,每个通道最大数据传输速率为2.5Gbps。
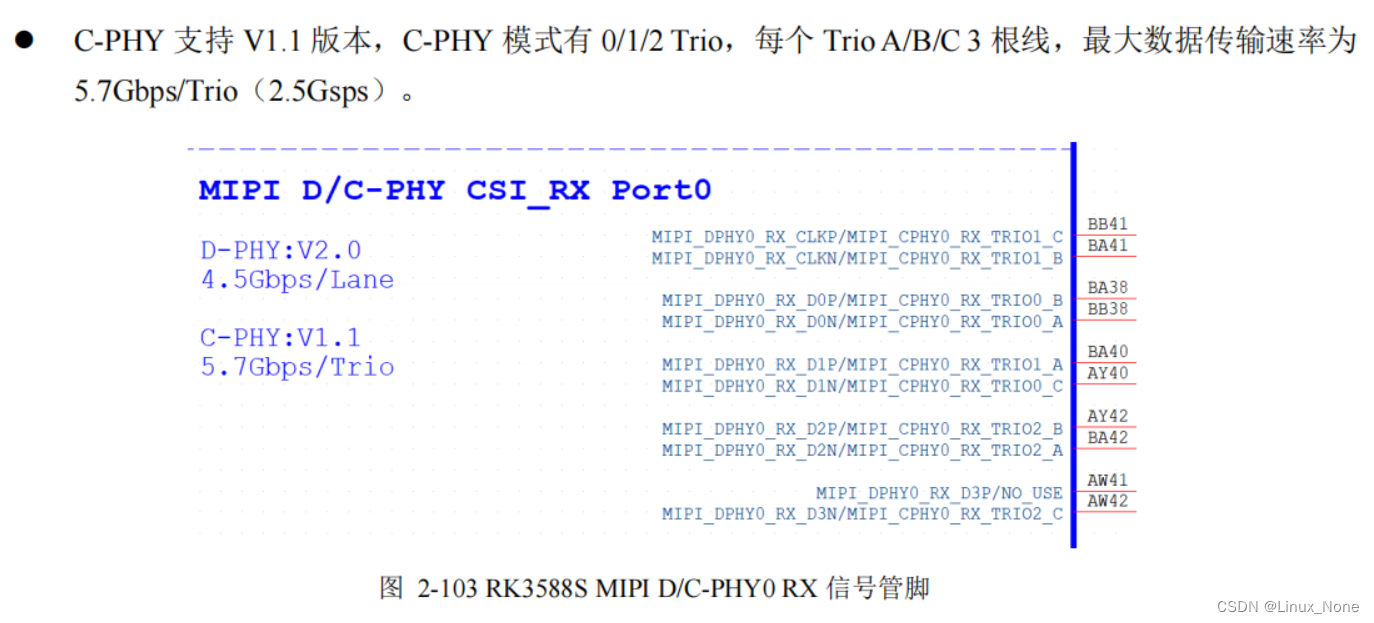
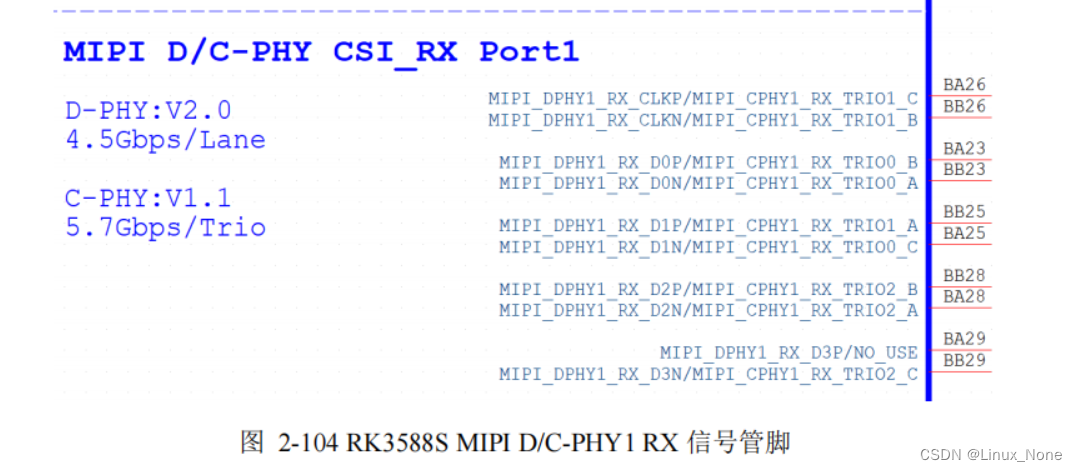
1.2 MIPI_D/CPHY_RX 接口
RK3588S 有两个 MIPI D-PHY/C-PHY CSI RX Combo 的 PHY,支持 V1.2 版本,D-PHY 模式有 0/1/2/3
Lane,每个 Lane 2 根线,最高传输速率 2.5Gbps/Lane;
- 建议使用 1 Lane or 2Lane 模式。
- 不支持 Skew calibration 功能,mipi bitrate >= 1.5Gbps/lane 的情况下,PCB 对于各 data lane 与 clk lane 之间的 skew 影响需要考虑更严格。
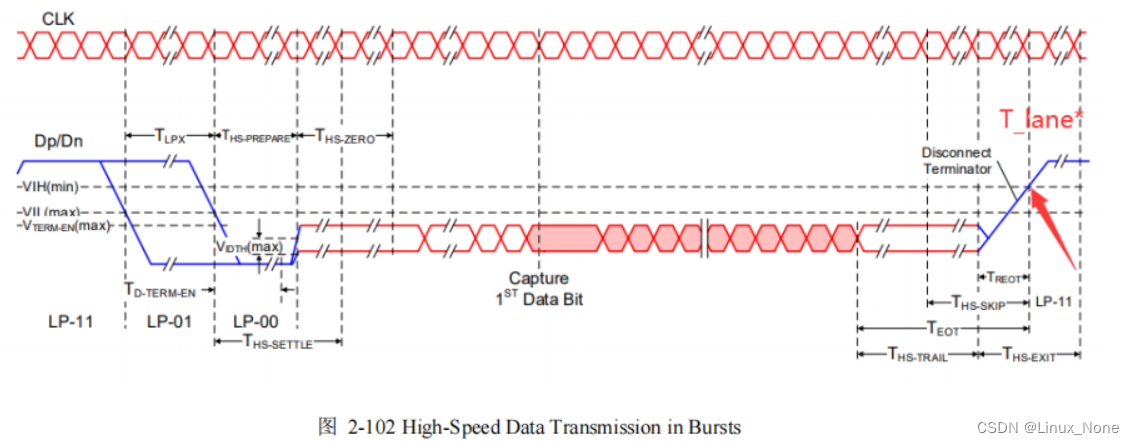
- 非必要时不建议使用 4Lane 模式,若一定要使用,对 Camera 的时序有严格要求,必须满足以下条件:
T_lane0 = T_lane1 = T_lane2 = T_lane3 或者(T_lane0 = T_lane1)> = (T_lane2 = T_lane3)
T_lane*以下图中箭头处时间点为参考:
2.实际分析
使用2个sensor, 下面是我的硬件原理图
 使用的split mode: 拆分成2个phy使用,分别为csi2_dphy1(使用0/1 lane)、csi2_dphy2(使用2/3 lane),
使用的split mode: 拆分成2个phy使用,分别为csi2_dphy1(使用0/1 lane)、csi2_dphy2(使用2/3 lane),
 所以链路如图所示
所以链路如图所示

dphy0_hw的设备树参考:
#ifndef RP_CAMERA_XS9922B
/{
vcc_camera: vcc-camera-regulator {
compatible = "regulator-fixed";
gpio = <&gpio4 RK_PB0 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&camera_pwr>;
regulator-name = "vcc_camera";
enable-active-high;
regulator-always-on;
regulator-boot-on;
};
};
&pinctrl {
camera_pwr: camera-pwr {
rockchip,pins =
/* camera power en */
<4 RK_PB0 3 &pcfg_pull_down>;
};
};
#endif
&i2c3 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&i2c3m1_xfer>;
imx415_2: imx415_2@1a {
compatible = "sony,imx415";
status = "okay";
reg = <0x1a>;
clocks = <&cru CLK_CIFOUT_OUT>;
clock-names = "xvclk";
power-domains = <&power RK3588_PD_VI>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clk>;
rockchip,grf = <&sys_grf>;
pwdn-gpios = <&gpio1 RK_PC1 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 RK_PB0 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "BACK";
rockchip,camera-module-name = "CMK-OT2022-PX1";
rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20";
port  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4300
4300











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









