







随着科技的不断发展,机器人技术已经成为现代工业、医疗、军事等领域不可或缺的一部分。而在机器人技术的研究与应用中,矩阵理论作为其基础数学工具之一,扮演着举足轻重的角色。分块矩阵作为矩阵理论中的一个重要概念,其在机器人技术中的应用也日益广泛。本文将重点探讨分块矩阵在机器人中的应用,包括其在机器人运动学、动力学、路径规划以及控制等方面的应用。
一、分块矩阵的基本概念
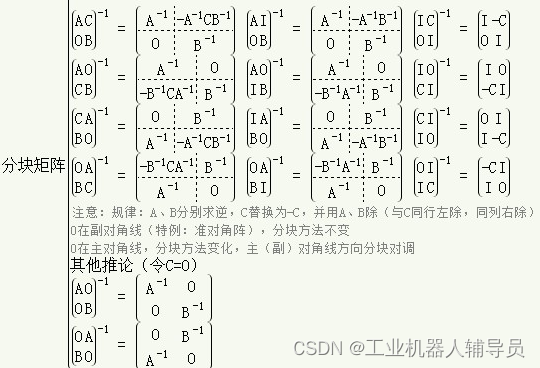
首先,我们来回顾一下分块矩阵的基本概念。分块矩阵是指将一个大矩阵按照某种规则分割成若干个小矩阵,这些小矩阵称为分块矩阵的子块。分块矩阵的引入可以简化矩阵的运算,提高计算效率,同时有助于理解和分析矩阵的结构和性质。
二、分块矩阵在机器人运动学中的应用
在机器人运动学中,机器人的位姿(位置和姿态)是通过一系列的变换矩阵来表示的。这些变换矩阵通常具有特定的结构,如旋转矩阵和平移矩阵。通过将这些变换矩阵进行分块处理,我们可以更加清晰地理解机器人的运动过程,并简化相关的计算。
例如,在机器人正运动学中,我们需要通过机器人的关节角度计算出末端执行器的位姿。这个过程可以通过一系列的变换矩阵来实现。通过将这些变换矩阵进行分块处理,我们可以将机器人的运动过程分解为若干个独立的运动单元,从而更加清晰地理解机器人的运动过程。
三、分块矩阵在机器人动力学中的应用
在机器人动力学中,机器人的运动过程需要满足一定的动力学方程。这些动力学方程通常具有复杂的矩阵形式,涉及到大量的矩阵运算。通过将这些矩
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2444
2444











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











