







学习CAN通讯。
CAN认识
CAN通讯是车辆底盘域的主要通信方式,1986年由博世开发,CAN控制器根据双绞线上的电位差来判断总线电平(显性/隐性),通过电平的变化,实现消息(报文)的发送。
CAN通信具有以下特点:
- 多主控制:即底盘网络内的所有ECU单元均可发送消息。
- 通信速度较快,通信距离远:最高1Mbps(距离小于40m),最远可达10KM(速率低于5Kbps)。
- 可连接节点多。
一般而言,125Kbps以下速率的称为低速CAN通信,125Kbps-1Mbps的称为高速CAN通信。
为了保持通信稳定,在CAN网络的两端需要并联2个120欧电阻,使得总线电阻保持在60欧左右。
显性电平对应逻辑0,CANH和CANL之差为2.5V左右;隐形电平对应逻辑1,CANH和CANL之差为0V。
CAN协议有5种类型的帧:
- 数据帧:用于发送单元向接收单元传送数据的帧(标准-11位和扩展-29位)
- 遥控帧:用于接收单元向具有相同 ID 的发送单元请求数据的帧
- 错误帧:用于当检测出错误时向其它单元通知错误的帧
- 过载帧:用于接收单元通知其尚未做好接收准备的帧
- 间隔帧:用于将数据帧及遥控帧与前面的帧分离开来的帧
数据帧一般由7个段组成:
- 帧起始:表示数据帧开始的段。
- 仲裁段:表示该帧优先级的段。
- 控制段:表示数据的字节数及保留位的段。
- 数据段:数据的内容,一帧可发送 0~8 个字节的数据。从最高位(MSB)开始输出。
- CRC段:检查帧的传输错误的段。
- ACK段:表示确认正常接收的段。
- 帧结束:表示数据帧结束的段。
数据段有Intel和Motorola两种格式。
STM32的位时序图:
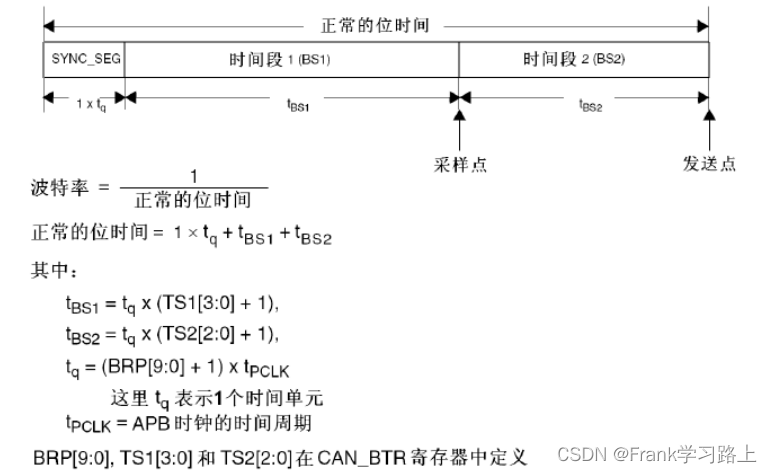
我们只需要知道 BS1 和 BS2 的设置,以及 APB1的时钟频率(一般为 36Mhz),就可以方便的计算出波特率。比如设置 TS1=6、TS2=7 和 BRP=4,在 APB1 频率为 36Mhz 的条件下,即可得到 CAN 通信的波特率=36000000/[(7+8+1)*5]=450Kbps。
STM32 提供了两种测试模式,环回模式和静默模式。
硬件电路
通过 WK_UP 按键选择 CAN 的工作模式(正常模式/环回模式),然后通过 KEY0控制数据发送,并通过查询的办法,将接收到的数据显示在 LCD 模块上。如果是环回模式,我们不需要 2 个开发板。如果是正常模式,我们就需要 2 个精英开发板,并且将他们的 CAN 接口对接起来(高对高,低对低),然后一个开发板发送数据,另外一个开发板将接收到的数据显示在 LCD 模块上。
另外,也可以用USB-CAN分析仪来测试。
硬件资源:
1) 指示灯 DS0
2) KEY0 和 KEY_UP 按键
3) TFTLCD 模块
4) CAN
5) CAN 收发芯片 JTA1050
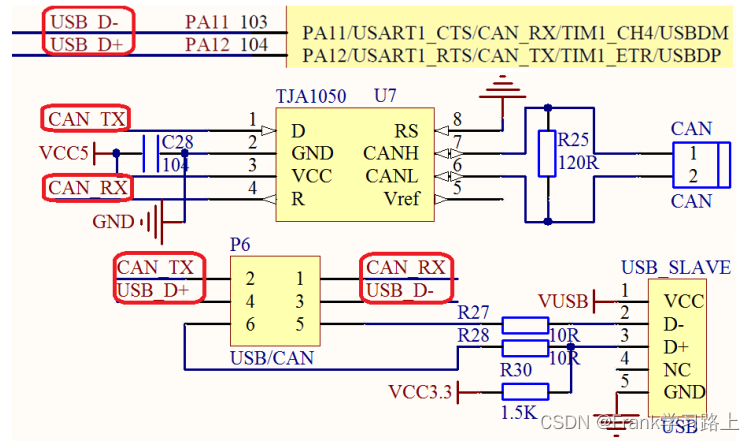
另外,我们要改变开发板上 P6 排针的连接,通过跳线帽将 PA11 和 PA12 分别连接到 CRX 和 CTX 上面。
软件程序
- CAN_Mode_Init 函数用于CAN初始化,该函数带有 5 个参数,可以设置 CAN 通信的波特率和工作模式等;
- Can_Send_Msg 函数。该函数用于 CAN 报文的发送,主要是设置标识符 ID等信息,写入数据长度和数据,并请求发送,实现一次报文的发送。
- Can_Receive_Msg 函数。用来接受数据并且将接受到的数据存放到 buf 中。
main函数:
int main(void)
{
u8 key;
u8 i=0,t=0;
u8 cnt=0;
u8 canbuf[8];
u8 res;
u8 mode=CAN_Mode_Normal;//CAN工作模式;CAN_Mode_Normal(0):普通模式,CAN_Mode_LoopBack(1):环回模式
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //初始化与LED连接的硬件接口
LCD_Init(); //初始化LCD
KEY_Init(); //按键初始化
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,CAN_Mode_LoopBack);//CAN初始化环回模式,波特率500Kbps
POINT_COLOR=RED;//设置字体为红色
LCD_ShowString(60,50,200,16,16,"WarShip STM32");
LCD_ShowString(60,70,200,16,16,"CAN TEST");
LCD_ShowString(60,90,200,16,16,"ATOM@ALIENTEK");
LCD_ShowString(60,110,200,16,16,"2015/1/11");
LCD_ShowString(60,130,200,16,16,"LoopBack Mode");
LCD_ShowString(60,150,200,16,16,"KEY0:Send WK_UP:Mode");//显示提示信息
POINT_COLOR=BLUE;//设置字体为蓝色
LCD_ShowString(60,170,200,16,16,"Count:"); //显示当前计数值
LCD_ShowString(60,190,200,16,16,"Send Data:"); //提示发送的数据
LCD_ShowString(60,250,200,16,16,"Receive Data:"); //提示接收到的数据
while(1)
{
key=KEY_Scan(0);
if(key==KEY0_PRES)//KEY0按下,发送一次数据
{
for(i=0;i<8;i++)
{
canbuf[i]=cnt+i;//填充发送缓冲区
if(i<4)LCD_ShowxNum(60+i*32,210,canbuf[i],3,16,0X80); //显示数据
else LCD_ShowxNum(60+(i-4)*32,230,canbuf[i],3,16,0X80); //显示数据
}
res=Can_Send_Msg(canbuf,8);//发送8个字节
if(res)LCD_ShowString(60+80,190,200,16,16,"Failed"); //提示发送失败
else LCD_ShowString(60+80,190,200,16,16,"OK "); //提示发送成功
}else if(key==WKUP_PRES)//WK_UP按下,改变CAN的工作模式
{
mode=!mode;
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,mode);//CAN普通模式初始化, 波特率500Kbps
POINT_COLOR=RED;//设置字体为红色
if(mode==0)//普通模式,需要2个开发板
{
LCD_ShowString(60,130,200,16,16,"Nnormal Mode ");
}else //回环模式,一个开发板就可以测试了.
{
LCD_ShowString(60,130,200,16,16,"LoopBack Mode");
}
POINT_COLOR=BLUE;//设置字体为蓝色
}
key=Can_Receive_Msg(canbuf);
if(key)//接收到有数据
{
LCD_Fill(60,270,130,310,WHITE);//清除之前的显示
for(i=0;i<key;i++)
{
if(i<4)LCD_ShowxNum(60+i*32,270,canbuf[i],3,16,0X80); //显示数据
else LCD_ShowxNum(60+(i-4)*32,290,canbuf[i],3,16,0X80); //显示数据
}
}
t++;
delay_ms(10);
if(t==20)
{
LED0=!LED0;//提示系统正在运行
t=0;
cnt++;
LCD_ShowxNum(60+48,170,cnt,3,16,0X80); //显示数据
}
}
}
以上。















 1196
1196











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











