






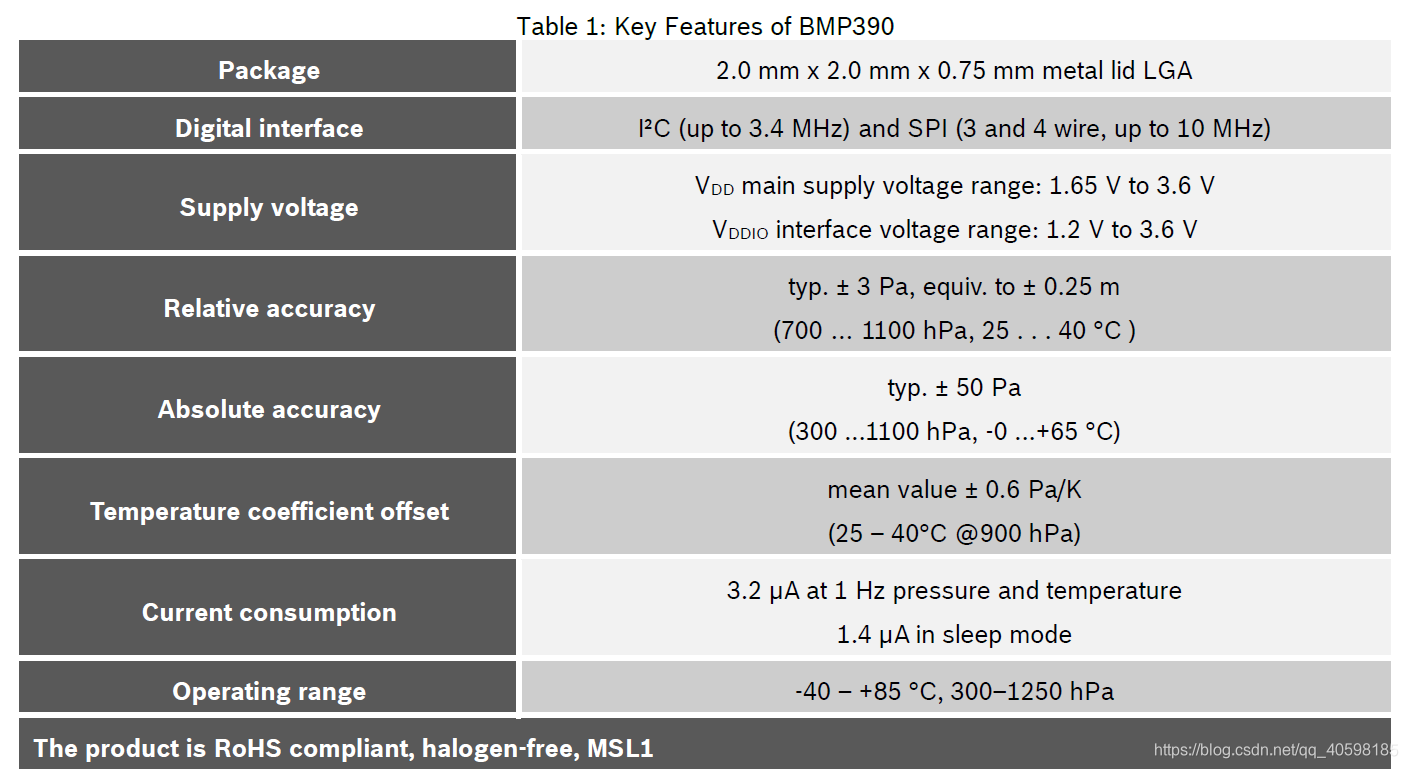
BMP390是BOSCH公司的一款高精度压力传感器(参考网址:https://www.bosch-sensortec.com/products/environmental-sensors/pressure-sensors/pressure-sensors-bmp390.html),其主要参数如下图所示,通信方式为I2C与SPI方式,最大供电电压为3.6V,相对精度为±3Pa(700hPa~1100hPa),绝对精度为±50Pa(300hPa~1100hPa)
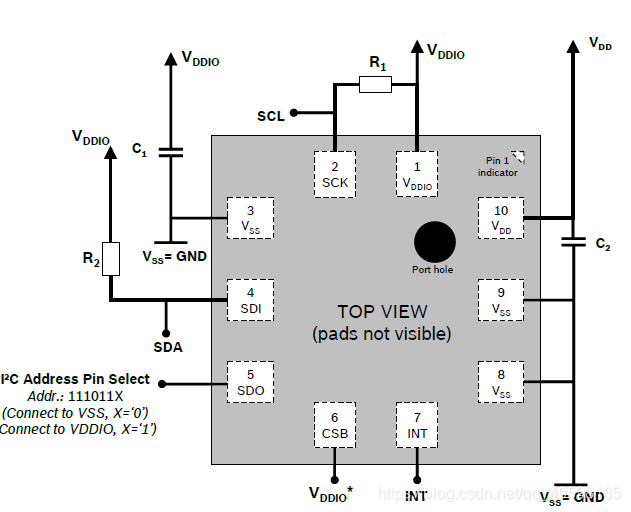
我们主要通过I2C进行通信,其硬件参考电路如下图所示,其中R1,R2为上拉电阻,阻值为4.7kΩ,C1,C2为旁路电容,容值为100 nF,CSB引脚拉高,SDO引脚为从机地址的选取引脚,接地时地址为0x76(01110110),当接高时地址为0x77(01110111)
I2C的通信方式,大家可以自行查阅,或者参考我以前的博客SPL06的底层代码,https://blog.csdn.net/qq_40598185/article/details/119347845。大同小异。为了大家方便复制,这里给出I2C的底层驱动代码,使用的是正点原子的底层驱动代码。(myiic.c)
#include "myiic.h"
#include "delay.h"
//初始化I2C
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_15); //SET the Pins to high level
}
//产生I2C起始信号(即START信号)
void IIC_Start(void)
{
SDA_OUT();
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;
}
//产生I2C停止信号(即STOP信号)
void IIC_Stop(void)
{
SDA_OUT();
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;
delay_us(4);
}
//等待应答信号
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN();
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;
return 0;
}
//产生ACK应答信号
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//不产生ACK应答信号
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//I2C发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0时,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();
else
IIC_Ack();
return receive;
}
其头文件如下(myiic.h):
#ifndef __MYIIC_H
#define __MYIIC_H
#include "sys.h"
//IO方向设置
#define SDA_IN() {GPIOB->CRH&=0X0FFFFFFF;GPIOB->CRH|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRH&=0X0FFFFFFF;GPIOB->CRH|=(u32)3<<28;}
//IO口操作函数
#define IIC_SCL PBout(13) //SCL
#define IIC_SDA PBout(15) //输出SDA
#define READ_SDA PBin(15) //输入SDA
//I2C所有操作函数
void IIC_Init(void); //初始化I2C的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //I2C发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//I2C读取一个字节
u8 IIC_Wait_Ack(void); //I2C等待ACK信号
void IIC_Ack(void); //I2C发送ACK信号
void IIC_NAck(void); //I2C不发送ACK信号
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif寄存器地址分布如下图所示,由于我们没有用到FIFO,所以关于FIFO的寄存器配置都不需要关注(只列出我们需要关注的寄存器)。
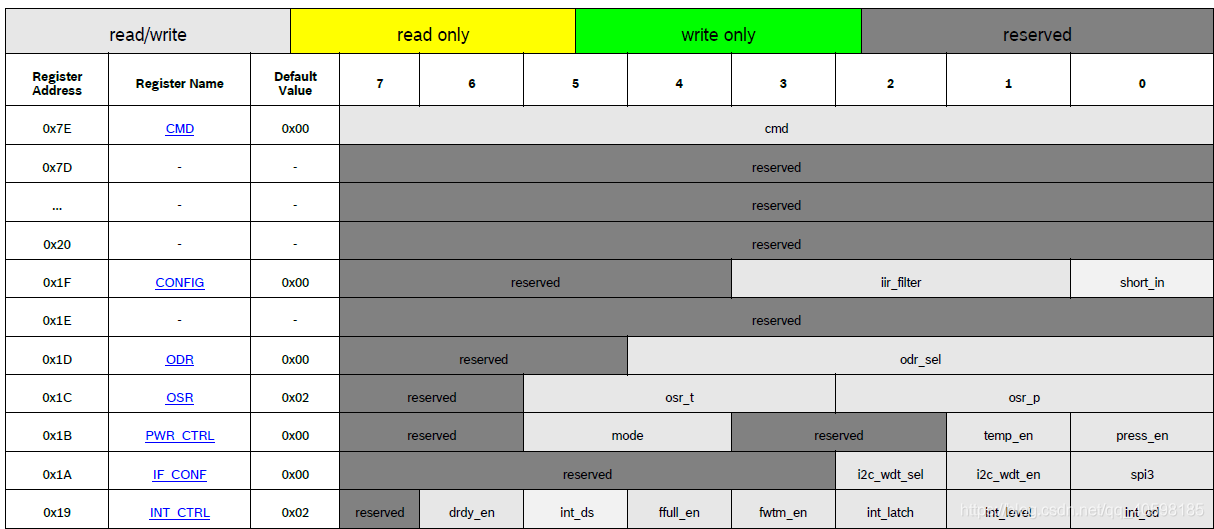
寄存器的配置如下所示,相关寄存器的详细说明请查看手册,这里压强测量使用的是最高精度测量,没有使用IIR滤波器。
u8 BMP390_Init(void)
{
u8 BMP390_ID;
BMP390_Write_Byte(CMD_Addr,0xB6);//RESET
delay_ms(100);
BMP390_ID = BMP390_Read_Byte(CHIP_ID_Addr);//Read the CHIP_ID-0x60
BMP390_Write_Byte(PWR_CTRL_Addr,0x33);//Set Working mode and state of sensor
BMP390_Write_Byte(IF_CONF_Addr,0x00);//Serial interface settings
BMP390_Write_Byte(INT_CTRL_Addr,0x02);//Set interrupt config
BMP390_Write_Byte(OSR_Addr,0x15);//Set the PM-RATE and PM-PRC,Set the TMPI-RATE and TMP-PRC
BMP390_Write_Byte(ODR_Addr,0x04);//Set the configuration of the output data rates by means of setting the subdivision/subsampling.
BMP390_Write_Byte(CONFIG_Addr,0x00);//IIR filter coeffcients
return BMP390_ID;
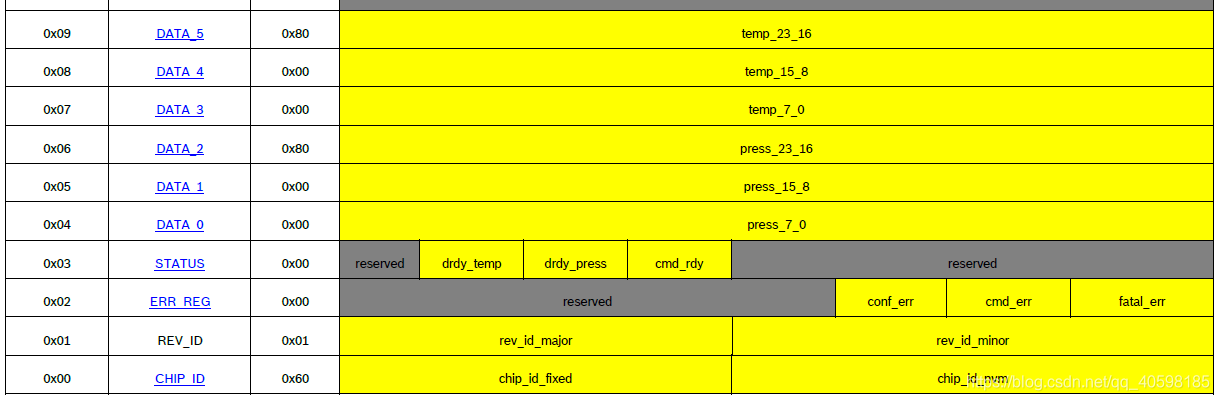
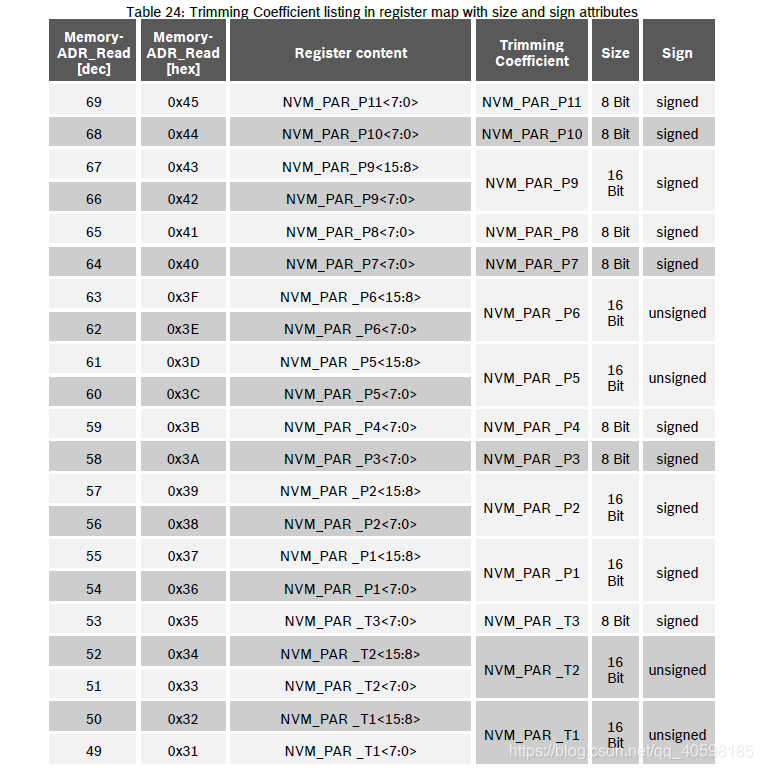
}同样的,BMP390有校正参数需要读取与相应的计算,BMP390的校准参数表如下所示,最后标注出了是否有符号以及校准参数相应的位数。一共有11个压强校准参数与3个温度校准参数。
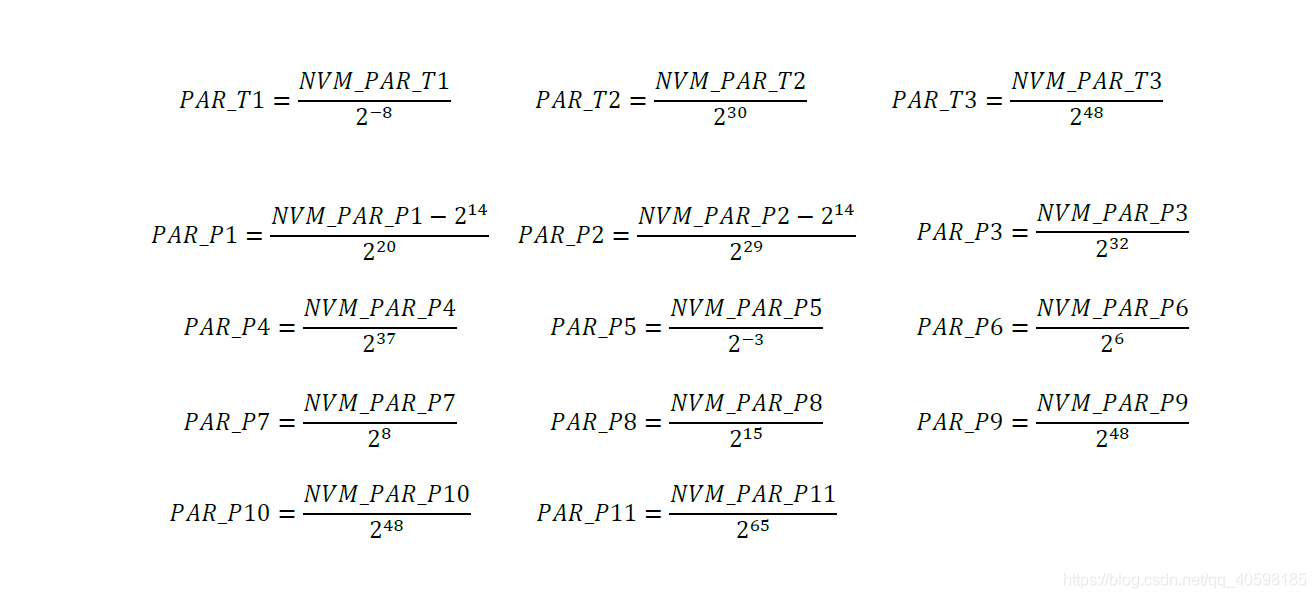
在参数读取之后,需要对其进行一定的处理,处理方法如下图所示:
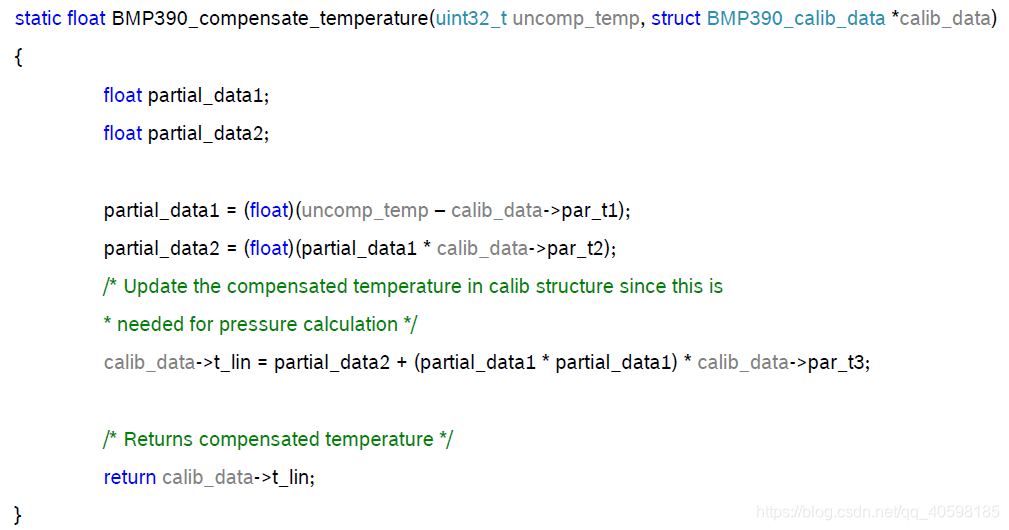
 其最后的参数计算如下图所示(温度计算流程):
其最后的参数计算如下图所示(温度计算流程):
其最后的参数计算如下图所示(压强计算流程):

最后BMP390的相关程序如下所示(BMP390.c):
#include "BMP390.h"
void BMP390_Write_Byte(u8 addr,u8 data)
{
IIC_Start();
IIC_Send_Byte(BMP390_Write);
IIC_Wait_Ack();
IIC_Send_Byte(addr);
IIC_Wait_Ack();
IIC_Send_Byte(data);
IIC_Wait_Ack();
IIC_Stop();
}
u8 BMP390_Read_Byte(u8 addr)
{
u8 BMP390_Data;
IIC_Start();
IIC_Send_Byte(BMP390_Write);
IIC_Wait_Ack();
IIC_Send_Byte(addr);
IIC_Wait_Ack();
IIC_Start();// start again
IIC_Send_Byte(BMP390_Read);
IIC_Wait_Ack();
BMP390_Data = IIC_Read_Byte(0);
IIC_Stop();
return BMP390_Data;
}
u8 BMP390_Init(void)
{
u8 BMP390_ID;
BMP390_Write_Byte(CMD_Addr,0xB6);//RESET
delay_ms(100);
BMP390_ID = BMP390_Read_Byte(CHIP_ID_Addr);//Read the CHIP_ID-0x60
BMP390_Write_Byte(PWR_CTRL_Addr,0x33);//Set Working mode and state of sensor
BMP390_Write_Byte(IF_CONF_Addr,0x00);//Serial interface settings
BMP390_Write_Byte(INT_CTRL_Addr,0x02);//Set interrupt config
BMP390_Write_Byte(OSR_Addr,0x15);//Set the PM-RATE and PM-PRC,Set the TMPI-RATE and TMP-PRC
BMP390_Write_Byte(ODR_Addr,0x04);//Set the configuration of the output data rates by means of setting the subdivision/subsampling.
BMP390_Write_Byte(CONFIG_Addr,0x00);//IIR filter coeffcients
return BMP390_ID;
}
u32 Temperature_Read(void)
{
u8 Temp_MSB,Temp_CSB,Temp_LSB;
u32 Temperature;
Temp_MSB = BMP390_Read_Byte(TMP_B2_Addr);
Temp_CSB = BMP390_Read_Byte(TMP_B1_Addr);
Temp_LSB = BMP390_Read_Byte(TMP_B0_Addr);
Temperature = (Temp_MSB<<16)+(Temp_CSB<<8)+Temp_LSB;
return Temperature;
}
u32 Pressure_Read(void)
{
u8 Pressure_MSB,Pressure_CSB,Pressure_LSB;
u32 Pressure;
Pressure_MSB = BMP390_Read_Byte(PSR_B2_Addr);
Pressure_CSB = BMP390_Read_Byte(PSR_B1_Addr);
Pressure_LSB = BMP390_Read_Byte(PSR_B0_Addr);
Pressure = (Pressure_MSB<<16)+(Pressure_CSB<<8)+Pressure_LSB;
return Pressure;
}
void Parameter_Reading(int *Pressure_Para,int *Temperature_Para)
{
u8 Temp_Config0,Temp_Config1,Temp_Config2,Temp_Config3,Temp_Config4;
u8 Press_Config0,Press_Config1,Press_Config2,Press_Config3,Press_Config4;
u8 Press_Config5,Press_Config6,Press_Config7,Press_Config8,Press_Config9;
u8 Press_Config10,Press_Config11,Press_Config12,Press_Config13,Press_Config14;
u8 Press_Config15;
//Temperature coefficients
Temp_Config0 = BMP390_Read_Byte(NVM_PAR_T1_L_Addr);
Temp_Config1 = BMP390_Read_Byte(NVM_PAR_T1_H_Addr);
Temp_Config2 = BMP390_Read_Byte(NVM_PAR_T2_L_Addr);
Temp_Config3 = BMP390_Read_Byte(NVM_PAR_T2_H_Addr);
Temp_Config4 = BMP390_Read_Byte(NVM_PAR_T3_Addr);
Temperature_Para[0] = (Temp_Config1<<8)+Temp_Config0;//T1
Temperature_Para[1] = (Temp_Config3<<8)+Temp_Config2;//T2
Temperature_Para[2] = Temp_Config4;//T3
if(Temperature_Para[2]&0x80) Temperature_Para[2] = Temperature_Para[2]-Total_Number_8;
//Pressure coefficients
Press_Config0 = BMP390_Read_Byte(NVM_PAR_P1_L_Addr);
Press_Config1 = BMP390_Read_Byte(NVM_PAR_P1_H_Addr);
Press_Config2 = BMP390_Read_Byte(NVM_PAR_P2_L_Addr);
Press_Config3 = BMP390_Read_Byte(NVM_PAR_P2_H_Addr);
Press_Config4 = BMP390_Read_Byte(NVM_PAR_P3_Addr);
Press_Config5 = BMP390_Read_Byte(NVM_PAR_P4_Addr);
Press_Config6 = BMP390_Read_Byte(NVM_PAR_P5_L_Addr);
Press_Config7 = BMP390_Read_Byte(NVM_PAR_P5_H_Addr);
Press_Config8 = BMP390_Read_Byte(NVM_PAR_P6_L_Addr);
Press_Config9 = BMP390_Read_Byte(NVM_PAR_P6_H_Addr);
Press_Config10 = BMP390_Read_Byte(NVM_PAR_P7_Addr);
Press_Config11 = BMP390_Read_Byte(NVM_PAR_P8_Addr);
Press_Config12 = BMP390_Read_Byte(NVM_PAR_P9_L_Addr);
Press_Config13 = BMP390_Read_Byte(NVM_PAR_P9_H_Addr);
Press_Config14 = BMP390_Read_Byte(NVM_PAR_P10_Addr);
Press_Config15 = BMP390_Read_Byte(NVM_PAR_P11_Addr);
//Coefficient P1
Pressure_Para[0] = (Press_Config1<<8)+Press_Config0;//P1
if(Pressure_Para[0]&0x8000) Pressure_Para[0] = Pressure_Para[0] - Total_Number_16;//P1
//Coefficient P2
Pressure_Para[1] = (Press_Config3<<8)+Press_Config2;//P2
if(Pressure_Para[1]&0x8000) Pressure_Para[1] = Pressure_Para[1] - Total_Number_16;//P2
//Coefficient P3
Pressure_Para[2] = Press_Config4;//P3
if(Pressure_Para[2]&0x80) Pressure_Para[2] = Pressure_Para[2] - Total_Number_8;//P3
//Coefficient P4
Pressure_Para[3] = Press_Config5;//P4
if(Pressure_Para[3]&0x80) Pressure_Para[3] = Pressure_Para[3] - Total_Number_8;//P4
//Coefficient P5
Pressure_Para[4] = (Press_Config7<<8)+Press_Config6;//P5
//Coefficient P6
Pressure_Para[5] = (Press_Config9<<8)+Press_Config8;//P6
//Coefficient P7
Pressure_Para[6] = Press_Config10;//P7
if(Pressure_Para[6]&0x80) Pressure_Para[6] = Pressure_Para[6] - Total_Number_8;//P7
//Coefficient P8
Pressure_Para[7] = Press_Config11;//P8
if(Pressure_Para[7]&0x80) Pressure_Para[7] = Pressure_Para[7] - Total_Number_8;//P8
//Coefficient P9
Pressure_Para[8] = (Press_Config13<<8)+Press_Config12;//P9
if(Pressure_Para[8]&0x8000) Pressure_Para[8] = Pressure_Para[8] - Total_Number_16;//P9
//Coefficient P10
Pressure_Para[9] = Press_Config14;//P10
if(Pressure_Para[9]&0x80) Pressure_Para[9] = Pressure_Para[9] - Total_Number_8;//P10
//Coefficient P11
Pressure_Para[10] = Press_Config15;//P11
if(Pressure_Para[10]&0x80) Pressure_Para[10] = Pressure_Para[10] - Total_Number_8;//P11
}
double Correcting_Pressure(u32 Pressure,int *Pressure_Para,double Corr_Temperature)
{
double PAR_P1,PAR_P2,PAR_P3,PAR_P4,PAR_P5;
double PAR_P6,PAR_P7,PAR_P8,PAR_P9,PAR_P10,PAR_P11;
double Corr_Pressure,partial_data1,partial_data2,partial_data3,partial_data4;
double partial_out1,partial_out2;
PAR_P1 = (Pressure_Para[0]-Total_Number_14)/Total_Number_20;
PAR_P2 = (Pressure_Para[1]-Total_Number_14)/Total_Number_29;
PAR_P3 = Pressure_Para[2]/Total_Number_32;
PAR_P4 = Pressure_Para[3]/Total_Number_32/Total_Number_5;
PAR_P5 = Pressure_Para[4]/Total_Number_Neg_3;
PAR_P6 = Pressure_Para[5]/Total_Number_6;
PAR_P7 = Pressure_Para[6]/Total_Number_8;
PAR_P8 = Pressure_Para[7]/Total_Number_15;
PAR_P9 = Pressure_Para[8]/Total_Number_32/Total_Number_16;
PAR_P10 = Pressure_Para[9]/Total_Number_32/Total_Number_16;
PAR_P11 = Pressure_Para[10]/Total_Number_32/Total_Number_32/Total_Number_1;
//Calculation
partial_data1 = PAR_P6*Corr_Temperature;
partial_data2 = PAR_P7*Corr_Temperature*Corr_Temperature;
partial_data3 = PAR_P8*Corr_Temperature*Corr_Temperature*Corr_Temperature;
partial_out1 = PAR_P5+partial_data1+partial_data2+partial_data3;
partial_data1 = PAR_P2*Corr_Temperature;
partial_data2 = PAR_P3*Corr_Temperature*Corr_Temperature;
partial_data3 = PAR_P4*Corr_Temperature*Corr_Temperature*Corr_Temperature;
partial_out2 = (double)(Pressure)*(PAR_P1+partial_data1+partial_data2+partial_data3);
partial_data1 = (double)(Pressure)*(double)(Pressure);
partial_data2 = PAR_P9+PAR_P10*Corr_Temperature;
partial_data3 = partial_data1*partial_data2;
partial_data4 = partial_data3+(double)(Pressure)*(double)(Pressure)*(double)(Pressure)*PAR_P11;
Corr_Pressure = partial_out1+partial_out2+partial_data4;
return Corr_Pressure;
}
double Correcting_Temperature(u32 Temperature,int *Temperature_Para)
{
double Corr_Temperature,PAR_T1,PAR_T2,PAR_T3;
double partial_data1,parital_data2;
PAR_T1 = Temperature_Para[0]/Total_Number_Neg_8;
PAR_T2 = Temperature_Para[1]/Total_Number_30;
PAR_T3 = Temperature_Para[2]/Total_Number_32/Total_Number_16;
//Calculation
partial_data1 = (double)(Temperature)-PAR_T1;
parital_data2 = partial_data1*PAR_T2;
Corr_Temperature = parital_data2+partial_data1*partial_data1*PAR_T3;
return Corr_Temperature;
}其头文件如下所示(BM390.h):
#ifndef __BMP390_H
#define __BMP390_H
#include "myiic.h"
#include "sys.h"
#include "LCD.h"
#include "delay.h"
#include "stdio.h"
#include "math.h"
#define BMP390_Write 0XEE
#define BMP390_Read 0xEF
#define CHIP_ID_Addr 0x00
#define REV_ID_Addr 0x01
#define ERR_REG_Addr 0x02
#define STATUS_Addr 0x03
#define PSR_B2_Addr 0x06
#define PSR_B1_Addr 0x05
#define PSR_B0_Addr 0x04
#define TMP_B2_Addr 0x09
#define TMP_B1_Addr 0x08
#define TMP_B0_Addr 0x07
#define SENSORTIME_0_Addr 0x0C
#define SENSORTIME_1_Addr 0x0D
#define SENSORTIME_2_Addr 0x0E
#define EVENT_Addr 0x10
#define INT_CTRL_Addr 0x19
#define IF_CONF_Addr 0x1A
#define PWR_CTRL_Addr 0x1B
#define OSR_Addr 0x1C
#define ODR_Addr 0x1D
#define CONFIG_Addr 0x1F
#define CMD_Addr 0x7E
#define NVM_PAR_P11_Addr 0x45
#define NVM_PAR_P10_Addr 0x44
#define NVM_PAR_P9_H_Addr 0x43
#define NVM_PAR_P9_L_Addr 0x42
#define NVM_PAR_P8_Addr 0x41
#define NVM_PAR_P7_Addr 0x40
#define NVM_PAR_P6_H_Addr 0x3F
#define NVM_PAR_P6_L_Addr 0x3E
#define NVM_PAR_P5_H_Addr 0x3D
#define NVM_PAR_P5_L_Addr 0x3C
#define NVM_PAR_P4_Addr 0x3B
#define NVM_PAR_P3_Addr 0x3A
#define NVM_PAR_P2_H_Addr 0x39
#define NVM_PAR_P2_L_Addr 0x38
#define NVM_PAR_P1_H_Addr 0x37
#define NVM_PAR_P1_L_Addr 0x36
#define NVM_PAR_T3_Addr 0x35
#define NVM_PAR_T2_H_Addr 0x34
#define NVM_PAR_T2_L_Addr 0x33
#define NVM_PAR_T1_H_Addr 0x32
#define NVM_PAR_T1_L_Addr 0x31
#define Total_Number_32 4294967296.0
#define Total_Number_30 1073741824.0
#define Total_Number_29 536870912.0
#define Total_Number_24 16777216.0
#define Total_Number_20 1048576.0
#define Total_Number_16 65536.0
#define Total_Number_15 32768.0
#define Total_Number_14 16384.0
#define Total_Number_12 4096.0
#define Total_Number_8 256.0
#define Total_Number_6 64.0
#define Total_Number_5 32.0
#define Total_Number_1 2.0
#define Total_Number_Neg_8 0.00390625
#define Total_Number_Neg_3 0.125
u8 BMP390_Init(void);
u8 BMP390_Read_Byte(u8 addr);
u32 Temperature_Read(void);
u32 Pressure_Read(void);
void BMP390_Write_Byte(u8 addr,u8 data);
void Parameter_Reading(int *Pressure_Para,int *Temperature_Para);
double Correcting_Temperature(u32 Temperature,int *Temperature_Para);
double Correcting_Pressure(u32 Pressure,int *Pressure_Para,double Corr_Temperature);
#endif
主函数如下,这里LCD的相关函数是正点原子的LCD函数,用于显示,需要的请自行去正点原子论坛下载。
#include "delay.h"
#include "sys.h"
#include "lcd.h"
#include "usart.h"
#include "myiic.h"
#include "BMP390.h"
#include "math.h"
#define Average_Times 6
#define Standard_atmospheric_pressure 101325.0
#define Offest_Pressure 0
int main(void)
{
u8 t=0;
u8 i;
u8 Config;
u8 lcd_id[12];
u8 BMP390_ID;
u32 Altitude_Temp,Alti_temp;
u32 Temperature,Temperature_Temp,Temp_temp;
u32 Pressure,Pressure_Temp,Pres_temp;
int Pressure_Para[11],Temperature_Para[3];
float Altitude;
double Correcting_Temp,Correcting_Press;
//Delay initialization
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// USART->115200
uart_init(115200);
//IIC initialization
IIC_Init();
//LCD initialization
LCD_Init();
LCD_Clear(WHITE);
sprintf((char*)lcd_id,"LCD ID:%04X",lcddev.id);//½«LCD ID´òÓ¡µ½lcd_idÊý×é¡\
//show initialization
POINT_COLOR=BLUE;
LCD_ShowString(30,20,240,24,16,"Pressure Measurement");
POINT_COLOR=RED;
LCD_ShowString(30,44,240,24,12,"Device ID:");
LCD_ShowString(30,56,240,24,12,"Mode:Temperature and Pressure");
LCD_ShowString(30,68,240,24,16,"Pressure:");
LCD_ShowString(30,84,240,24,12,"Temperature:");
LCD_ShowString(30,96,240,24,12,"Altitude:");
LCD_ShowString(30,108,240,24,12,"Sensor:");
LCD_ShowString(30,120,240,24,12,"Sensor Config Status:");
LCD_ShowString(30,132,240,24,12,"Number of Reads:");
//SPL06_Init
BMP390_ID = BMP390_Init();
Parameter_Reading(Pressure_Para,Temperature_Para);
LCD_ShowxNum(91,44,BMP390_ID,3,12,0);
//Judge the relevant state of the sensor
Config = BMP390_Read_Byte(ERR_REG_Addr);
if(Config&0x01) LCD_ShowString(73,108,240,24,12,"Fatal Error");
else LCD_ShowString(73,108,240,24,12,"No errors.");
if((Config>>1)&0x01) LCD_ShowString(157,120,240,24,12,"Failed.");
else LCD_ShowString(157,120,240,24,12,"Successful.");
while(1)
{
Pressure = 0;
Temperature = 0;
for (i=0;i<Average_Times;i++)
{
Config = BMP390_Read_Byte(STATUS_Addr);
while(1)
{
if(((Config>>5)&0x01) && ((Config>>6)&0x01) && i == 0)
{
Pressure = Pressure_Read();
Temperature = Temperature_Read();
LCD_ShowString(30,144,240,24,12," ");
LCD_ShowString(30,144,240,24,12,"Data is ready!");
break;
}
else if(((Config>>5)&0x01) && ((Config>>6)&0x01) && i > 0)
{
Pressure = Pressure + Pressure_Read();
Temperature = Temperature + Temperature_Read();
LCD_ShowString(30,144,240,24,12," ");
LCD_ShowString(30,144,240,24,12,"Data is ready!");
break;
}
else
{
LCD_ShowString(30,144,240,24,12," ");
LCD_ShowString(30,144,240,24,12,"Data is not ready!");
break;
}
}
delay_ms(100);
}
Pressure = Pressure/Average_Times;
Temperature = Temperature/Average_Times;
Correcting_Temp = Correcting_Temperature(Temperature,Temperature_Para);
Correcting_Press = Correcting_Pressure(Pressure,Pressure_Para,Correcting_Temp)+Offest_Pressure;
Altitude = 44330*(1-pow(Correcting_Press/Standard_atmospheric_pressure,1.0/5.255));
//show the Correcting Pressure
Pressure_Temp = Correcting_Press*10;
Pres_temp = Pressure_Temp/10;
LCD_ShowxNum(102,68,Pres_temp,7,16,0);
LCD_ShowString(159,68,240,24,16,".");
Pres_temp = Pressure_Temp%10;
LCD_ShowxNum(168,68,Pres_temp,1,16,0);
LCD_ShowString(177,68,240,24,16,"Pa");
//show the Correcting Temperature
Temperature_Temp = Correcting_Temp*10;
Temp_temp = Temperature_Temp/10;
LCD_ShowxNum(103,84,Temp_temp,4,12,0);
LCD_ShowString(128,84,240,24,12,".");
Temp_temp = Temperature_Temp%10;
LCD_ShowxNum(135,84,Temp_temp,1,12,0);
LCD_ShowString(143,84,240,24,12,"Centigrade");
//show the altitude
Altitude_Temp = Altitude*10;
Alti_temp = Altitude_Temp/10;
LCD_ShowxNum(85,96,Alti_temp,4,12,0);
LCD_ShowString(110,96,240,24,12,".");
Alti_temp = Altitude_Temp%10;
LCD_ShowxNum(117,96,Alti_temp,1,12,0);
LCD_ShowString(130,96,240,24,12,"m");
// count the reading times
t++;
LCD_ShowxNum(127,132,t,3,12,0);
}
}
测试结果如下表所示:
| 标准压强(Pa) | 测试压强(Pa) |
| 30000 | 30029 |
| 50000 | 50042 |
| 70000 | 70060 |
| 80000 | 80071 |
| 90000 | 90081 |
| 100000 | 100088 |

















 1924
1924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









