






目录


NPN形与PNP形继电器三极管驱动电路
二极管作用是在关断后与继电器线圈形成回路保护电路。
1、三极管接法,以NPN为例。
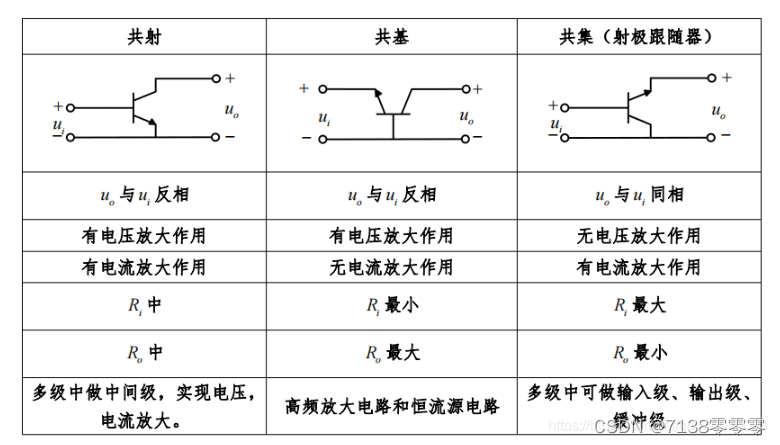
2、基本共射级电路
(1)直流模型
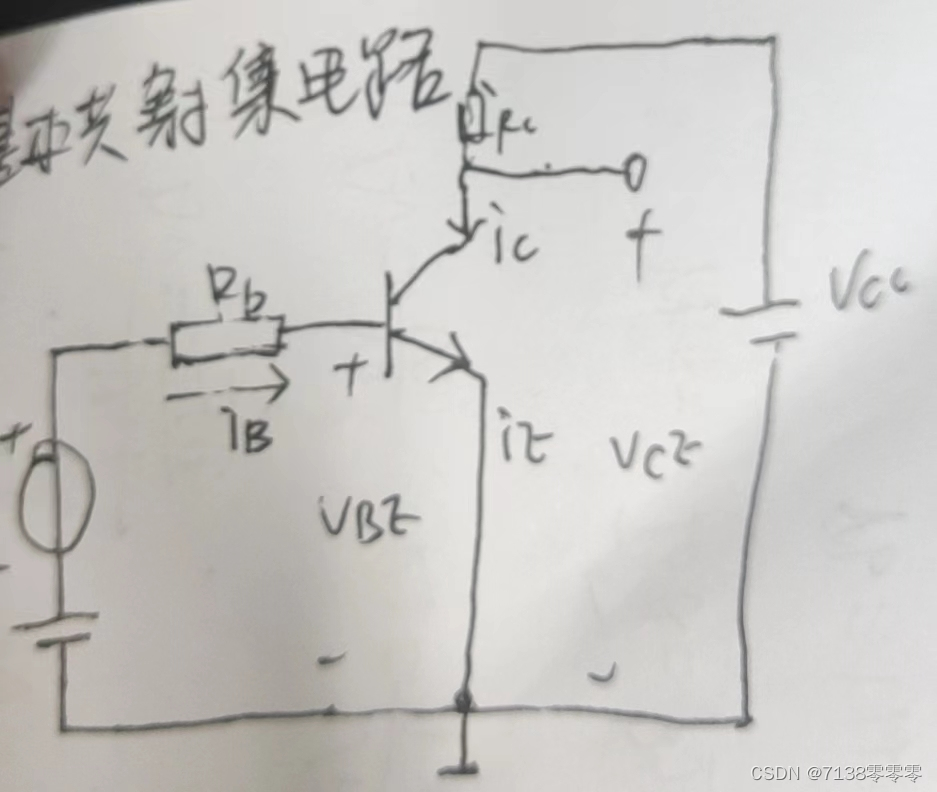
直流通路中:
,其中,VBEQ通常为固定值,硅管为0.6-0.7V,锗管为0.2-0.3V
(2)小信号模型及其等效电路
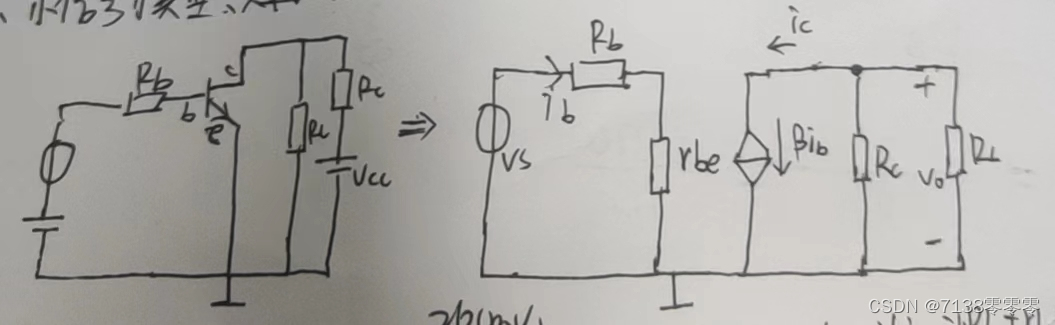
电压增益:
则:
输入阻抗:
(3)射集偏置电路
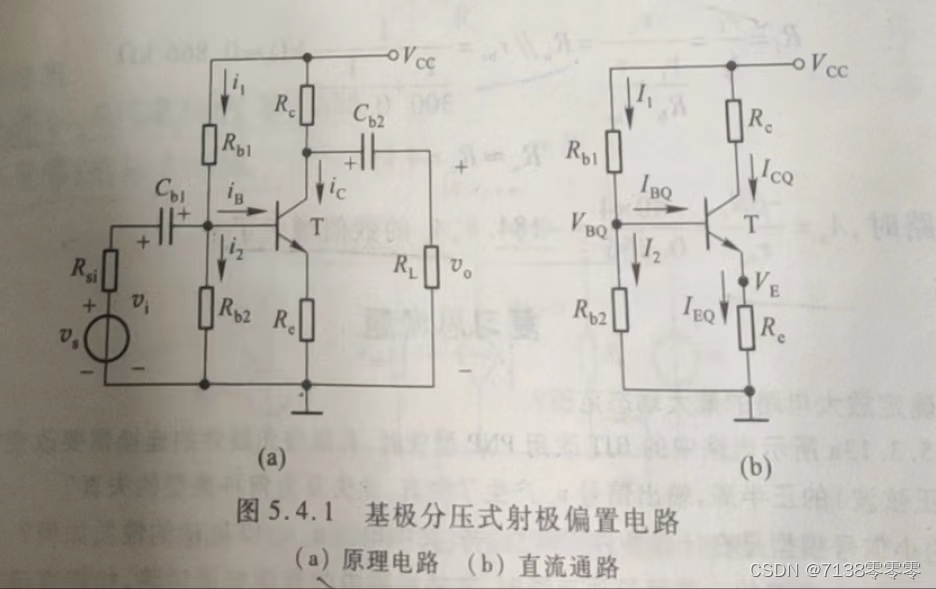
集级分压式偏置电路
在直流通路求Q点的值,I1远大于IBQ时有:
集电极电流:
基极电流:
集电极-射极电压:
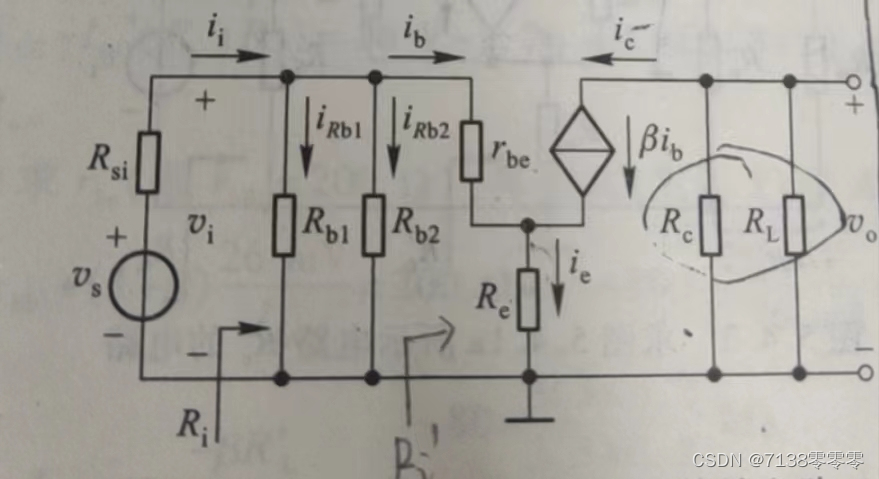
集级分压式偏置电路小信号模型
电压增益:,
,添加大电容发射极旁路电容,
输入电阻:
则:

















 1060
1060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









