






NMS:原理
同一个目标会被多个建议框包围,这时需要非极大值抑制操作去除得分较低的候选框以减少重叠框。
- 对2000×20维矩阵中每列按从大到小排序;
- 从每列最大的得分建议框开始,分别与该列后面的得分建议框进行IoU计算,若IoU>阈值(0.3~0.5),则剔除得分较小的建议框,否则认为图像中存在多个同一类物体;
- 从每列次大的得分建议框开始,重复步骤2;
- 重复步骤3直到遍历完该列所有建议框;
- 遍历完2000×20维矩阵所有列,即所有物体种类都做一遍非极大值抑制;
NMS:栗子
假设从小到大属于车辆的概率 分别为A、B、C、D、E、F。
- 从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
- 假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
- 从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
- 就这样一直重复,找到所有被保留下来的矩形框。
NMS:代码
https://github.com/rbgirshick/py-faster-rcnn/blob/master/lib/nms/py_cpu_nms.py
单个类别MNS:
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# --------------------------------------------------------
import numpy as np
def py_cpu_nms(dets, thresh):
"""Pure Python NMS baseline."""
#x1,y1,x2,y2,scores的赋值
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
#每个检测框的大小
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
#置信度scores按照降序排列
order = scores.argsort()[::-1]
#保留最终结果框的集合
keep = []
while order.size > 0:
#得分最大框的索引
i = order[0]
#保留该类剩余box中得分最高的一个
keep.append(i)
#得到相交区域,左上(大)及右下(小)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
##计算相交的面积,不重叠时面积为0
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
#计算IoU,重叠面积 /(面积1+面积2-重叠面积)
ovr = inter / (areas[i] + areas[order[1:]] - inter)
#保留IoU小于阈值的box
inds = np.where(ovr <= thresh)[0]
#因为ovr数组的长度比order数组少一个,所以这里要将所有下标后移一位
order = order[inds + 1]
return keep
© 2019 GitHub, Inc.
Soft-NMS:背景
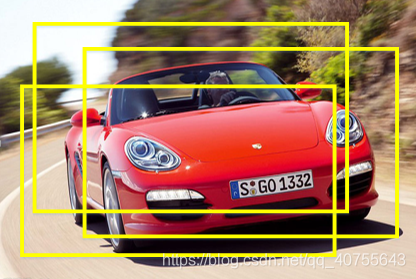
传统的NMS是将检测框按得分排序,然后保留得分最高的框,同时删除与该框重叠面积大于阈值的其它框。

但是这种贪心式方法存在问题: 上图红色框和绿色框是当前的检测结果,二者的得分分别是0.95和0.80。如果按照传统的NMS进行处理,会保留红色框而删除绿色框,会导致只检测出一匹马,显然目标的recall就比较低了。
Soft-NMS:原理
论文链接:Soft-NMS -- Improving Object Detection With One Line of Code
github链接:https://github.com/ZhangCats/soft-nms/blob/master/lib/nms/cpu_nms.pyx
思想:稍低一点的分数来代替原有的分数,而不是直接置零。

由伪代码:对于B中的bi是先计算其和M(就是当前得分最大的框)的IOU,然后该IOU值作为函数f()的输入,最后和bi的得分si相乘作为最后该bi的得分。
如何确定函数f()?
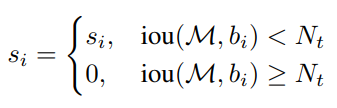
传统的NMS:
将IOU大于阈值的窗口的得分全部置为0
Soft改进:
线性加权,遵循iou越大,得分越低的原则

但是这个公式是不连续的,这样会导致box集合中的score出现断层
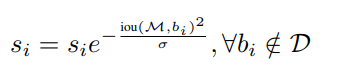
Soft再改进:
高斯加权,M为当前得分最高框,bi为待处理框,bi和M的IOU越大,bi的得分si就越低。
Soft-NMS:代码
def cpu_soft_nms(np.ndarray[float, ndim=2] boxes, float sigma=0.5, float Nt=0.3, float threshold=0.001, unsigned int method=0):
cdef unsigned int N = boxes.shape[0]
cdef float iw, ih, box_area
cdef float ua
cdef int pos = 0
cdef float maxscore = 0
cdef int maxpos = 0
cdef float x1,x2,y1,y2,tx1,tx2,ty1,ty2,ts,area,weight,ov
for i in range(N):
maxscore = boxes[i, 4]
maxpos = i
tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4]
pos = i + 1
# get max box 获得最大得分框
while pos < N:
if maxscore < boxes[pos, 4]:
maxscore = boxes[pos, 4]
maxpos = pos
pos = pos + 1
# add max box as a detection 添加Max Box作为检测
boxes[i,0] = boxes[maxpos,0]
boxes[i,1] = boxes[maxpos,1]
boxes[i,2] = boxes[maxpos,2]
boxes[i,3] = boxes[maxpos,3]
boxes[i,4] = boxes[maxpos,4]
# swap ith box with position of max box 将第i个框与最大框的位置互换
boxes[maxpos,0] = tx1
boxes[maxpos,1] = ty1
boxes[maxpos,2] = tx2
boxes[maxpos,3] = ty2
boxes[maxpos,4] = ts
tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4]
pos = i + 1
# NMS iterations, note that N changes if detection boxes fall below threshold
# NMS迭代,请注意,如果检测框低于阈值,n会发生变化
while pos < N:
x1 = boxes[pos, 0]
y1 = boxes[pos, 1]
x2 = boxes[pos, 2]
y2 = boxes[pos, 3]
s = boxes[pos, 4]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
iw = (min(tx2, x2) - max(tx1, x1) + 1)
if iw > 0:
ih = (min(ty2, y2) - max(ty1, y1) + 1)
if ih > 0:
ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)
ov = iw * ih / ua #iou between max box and detection box
if method == 1: # linear
if ov > Nt:
weight = 1 - ov
else:
weight = 1
elif method == 2: # gaussian
weight = np.exp(-(ov * ov)/sigma)
else: # original NMS
if ov > Nt:
weight = 0
else:
weight = 1
boxes[pos, 4] = weight*boxes[pos, 4]
# if box score falls below threshold, discard the box by swapping with last box
#如果方框得分低于阈值,则通过交换最后一个方框来丢弃方框。
# update N 更新N
if boxes[pos, 4] < threshold:
boxes[pos,0] = boxes[N-1, 0]
boxes[pos,1] = boxes[N-1, 1]
boxes[pos,2] = boxes[N-1, 2]
boxes[pos,3] = boxes[N-1, 3]
boxes[pos,4] = boxes[N-1, 4]
N = N - 1
pos = pos - 1
pos = pos + 1
keep = [i for i in range(N)]
return keep
def cpu_nms(np.ndarray[np.float32_t, ndim=2] dets, np.float thresh):
cdef np.ndarray[np.float32_t, ndim=1] x1 = dets[:, 0]
cdef np.ndarray[np.float32_t, ndim=1] y1 = dets[:, 1]
cdef np.ndarray[np.float32_t, ndim=1] x2 = dets[:, 2]
cdef np.ndarray[np.float32_t, ndim=1] y2 = dets[:, 3]
cdef np.ndarray[np.float32_t, ndim=1] scores = dets[:, 4]
cdef np.ndarray[np.float32_t, ndim=1] areas = (x2 - x1 + 1) * (y2 - y1 + 1)
cdef np.ndarray[np.int_t, ndim=1] order = scores.argsort()[::-1]
cdef int ndets = dets.shape[0]
cdef np.ndarray[np.int_t, ndim=1] suppressed = \
np.zeros((ndets), dtype=np.int)
# nominal indices
cdef int _i, _j
# sorted indices
cdef int i, j
# temp variables for box i's (the box currently under consideration)
cdef np.float32_t ix1, iy1, ix2, iy2, iarea
# variables for computing overlap with box j (lower scoring box)
cdef np.float32_t xx1, yy1, xx2, yy2
cdef np.float32_t w, h
cdef np.float32_t inter, ovr
keep = []
for _i in range(ndets):
i = order[_i]
if suppressed[i] == 1:
continue
keep.append(i)
ix1 = x1[i]
iy1 = y1[i]
ix2 = x2[i]
iy2 = y2[i]
iarea = areas[i]
for _j in range(_i + 1, ndets):
j = order[_j]
if suppressed[j] == 1:
continue
xx1 = max(ix1, x1[j])
yy1 = max(iy1, y1[j])
xx2 = min(ix2, x2[j])
yy2 = min(iy2, y2[j])
w = max(0.0, xx2 - xx1 + 1)
h = max(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (iarea + areas[j] - inter)
if ovr >= thresh:
suppressed[j] = 1
return keep














 2074
2074











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









