






阅读前请看一下:我是一个热衷于记录的人,每次写博客会反复研读,尽量不断提升博客质量。文章设置为仅粉丝可见,是因为写博客确实花了不少精力。希望互相进步谢谢!!
文章目录
提示:以下是本篇文章正文内容
1、地磁预处理
目前,地磁室内定位的研究主要基于两种方式:
1、地磁模值
2、三轴磁场强度
现在地磁结合大模型的通用做法两种:
1、单点磁场数据 or 磁场序列作为输入
2、将地磁特征转化为图像
影响地磁定位的重要特征:
设备、用户、空间多样性、时间多样性、动态性、手机朝向(即姿态异构)、行人速度、路径轨迹、传感器融合。
处理速度异构时,目前看到的是:
1、直接将不同速度的地磁序列喂到大模型,即喂紧去的序列长度不一样,例如若盈姐的论文;
2、也是要喂不同速度的地磁序列,不过要先对地磁序列进行缩放,快速or慢速的需要搞到和正常速度下一样长度的地磁序列,再喂进大模型。例如《Accurate Indoor Localization Using Magnetic Sequence Fingerprints with DeepLearning》
关于硬磁、软磁干扰:
1、软磁干扰指的是地磁磁场与飞行器周围的磁化物质相互作用而产生的,这个干扰数值与航向有关,会导致磁力计所采集的数据形成的圆球变成椭球。
2、硬磁干扰指的是被磁化的物质所产生的,是一个固定值,不随着航向的变化而变化,会导致磁力计所采集的数据形成的圆球偏离球心。
具体可以查看《NXP传感器融合笔记09(地磁,干扰及校准,椭球拟合)》 + 《基于智能手机平台的地磁室内定位系统_谢宏伟》
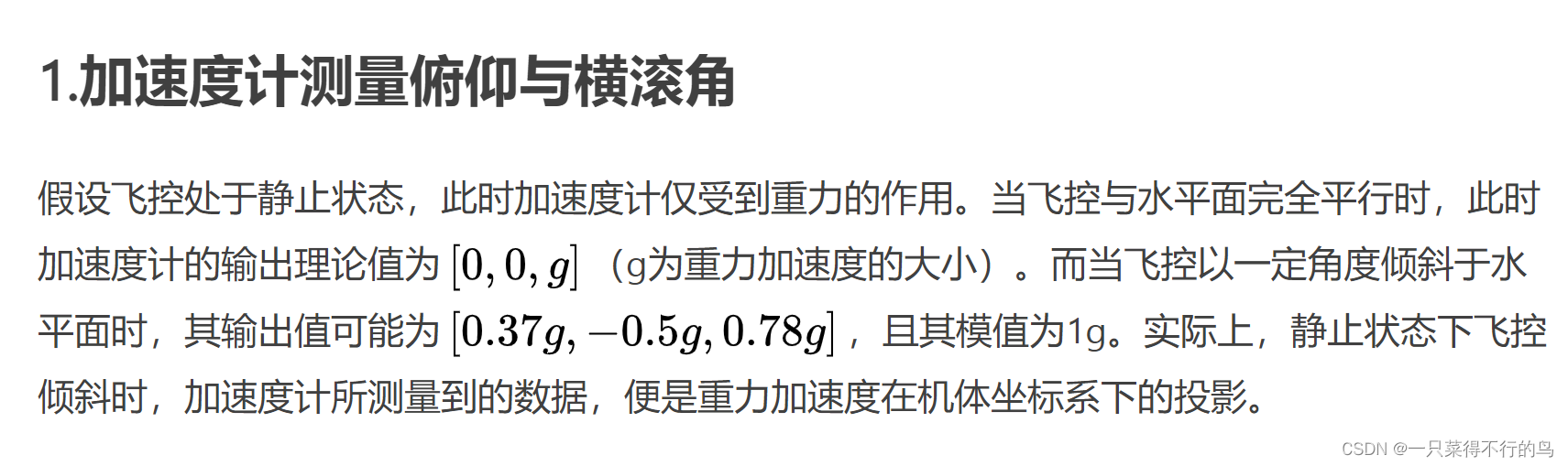
2、IMU、姿态角
关于偏航角、俯仰角、横滚角最初是应用在飞航设备上的,不清楚的可以先看《IMU中加速度计、陀螺仪、磁力计的工作原理》 里面的动图。
Yaw(偏航角):取值范围是-180到180度。
Roll(翻滚角):表示手机左侧或右侧翘起的角度,该角度值将会发生变化,取值范围是-90到90度。
Pitch(俯仰角):表示手机顶部或尾部翘起的角度,该角度会发生变化,取值范围是-180到180度。
《例说姿态解算与导航10-2(IMU,AHRS 加速度计,陀螺仪,地磁计概念)》:对于北半球来说,地磁场方向斜向下,对于南半球,地磁场方向斜向上。
IMU的科普:《IMU传感器,你所需要知道的全部》
IMU的基础:《惯性测量单元IMU基础》
《姿态篇:一.初识姿态估计》:方向余弦矩阵(Direction Cosine Matrix,简称DCM
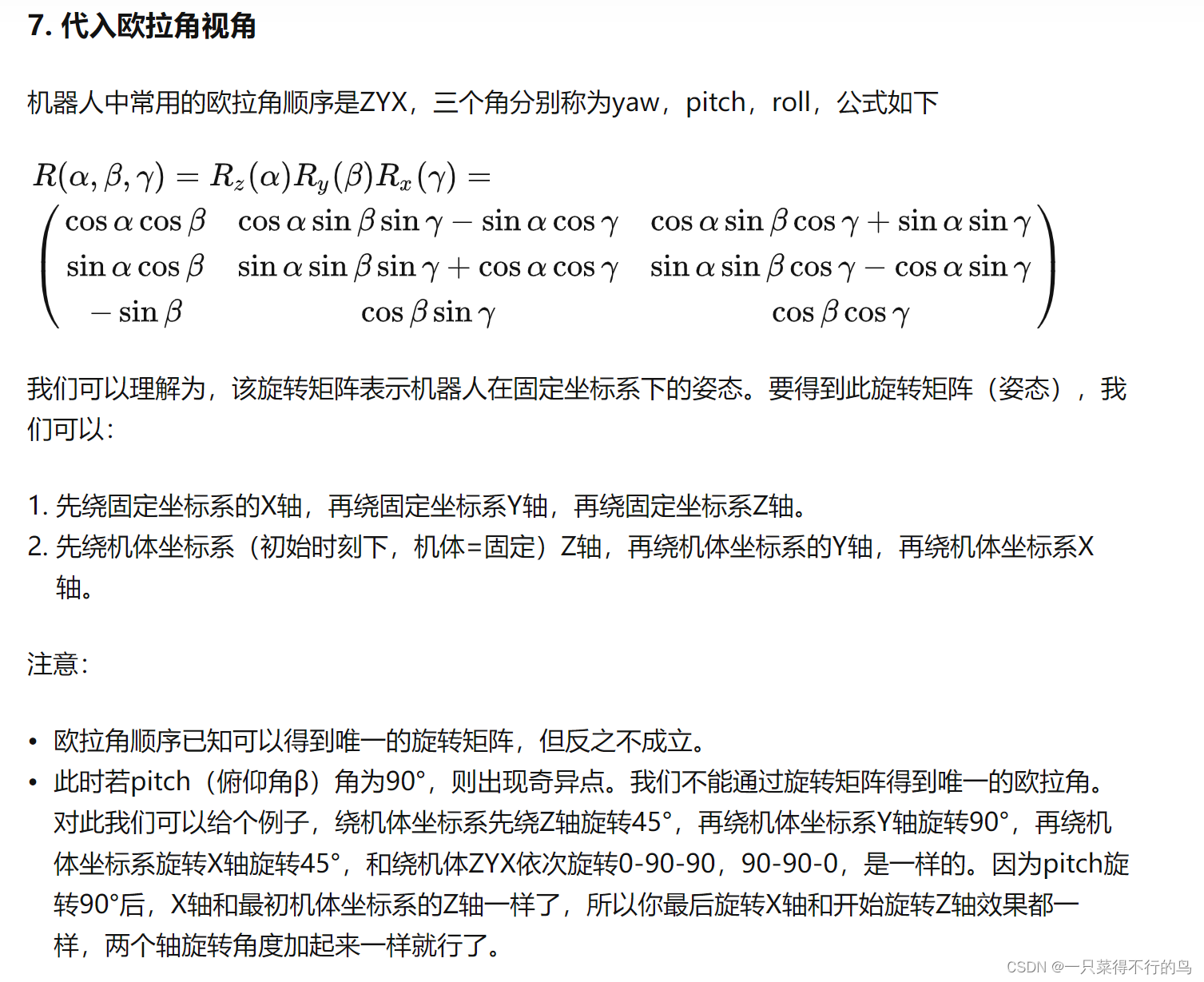
“旋转顺序问题” 可谓是"万恶之源" ,如果你之前网上看过欧拉角到旋转矩阵的公式,你肯定晕掉了,“怎么这里和那里写的对不上啊”!
对不上的问题,基本可以归纳为以下几点:1、大家的旋转顺序定义不一样,又没有提前说明。
2、没有清楚的告诉读者,旋转矩阵是b2n还是 n2b的。
3、没有告诉读者,是坐标变换矩阵还是坐标系变换矩阵。
视频:
《无人机DIY入门系列教程:(三)姿态解算上:姿态角、欧拉角与旋转矩阵》
《【深度教学】姿态解算理论及应用(持续更新)》
、总结
码字不易,谢谢点赞!!!
码字不易,谢谢点赞!!!
码字不易,谢谢点赞!!!
















 69
69











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









