







背景知识:
导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角);
- 航向角北偏西为正,范围【-pi pi】;
- 俯仰角, 运载体抬头时角度定义为正,角度范围-90° ~90° ;
- 横滚角,运载体向右倾斜时角度定义为正,角度范围-180° ~180°
重力矢量和地球自转角速度在地理坐标系下:

一、地磁场
1、地球磁场分布图:
地球磁场:地球的磁场象一个条形磁体一样由磁南极指向磁北极。在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。随着地理位置的不同,通常地磁场的强度是0.4-0.6Gauss。需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11.5度左右的夹角。
单位:
1Tesla=10000Gauss
1高斯 =100000 nT
1高斯 =1000 mGauss
1mGauss=100nT

2、 地磁要素图:
设观测点在O处,并以O点为原点建立地理坐标系OXYZ,X轴指向北,Y轴指向东,Z轴垂直指向地。

地磁场强度T在X轴上的投影Bn称为地磁场的北向分量;T在Y轴上的投影Be称为东向分量;T在Z轴上的投影Bz称为地磁场的垂向分量。T在水平面O-XY的投影Bh称为地磁场的水平分量。地磁水平分量Bh和垂向分量Bz所在平面称为磁子午面,磁子午面和地理子午面O-XZ平面的夹角称为磁偏角,用D表示,并规定其东偏为正,西偏为负。地磁场强度T与水平面O-XY的夹角称为磁倾角,用I表示。上述,T、Bh、Bn、Be、Bz、D、I统称为地磁场七要素,可作为定位定向的参考量。七要素只要知道三个独立的要素,就可以求其余的要素,常用的是磁倾角、磁偏角和水平分量。七要素间有如下关系:

3、中国地磁要素变化:
中国的地磁要素大致分布情况:国境内地磁强度总量范围0.41~0.60Gauss(1 Gauss = 10^-4T);水平分量Bh由南至北从0.4降至0.21;垂直分量Bz由南至北从-0.1增至0.56;磁倾角I由南至北从-10°增至70°;磁偏角D由东向西从-11°增至5°,零偏线在中国中部偏西处,由北向南经过甘肃的安西以及西藏的得宋。
4、地磁场的一级近似:
对地磁场的一种近似,如下图所示:

不考虑地磁轴与地球自转轴的偏离问题,地磁强度分量可用以下解析式来描述:

其中,东向地磁分量为0;在实际运算中,将磁力计在水平面X、Y轴的测量值,全部投影到北向,并将东向置零。
二、磁力计校准
根据磁力计轴数的不同,分为不同的校准方法;由于目前市场上主流磁力计均是三轴磁力计,因此本文重点介绍基于椭球拟合的磁力计校准方法。在实际生活中,我们接触最多的是电子罗盘,比如手机中,其内部采用了三轴加速度计和三轴磁力计构成电子罗盘。三轴加速度计用于测量载体的姿态角,用以补偿磁力计的测量值,因此,也就限定了电子罗盘更适合在静止或类静止的条件下进行测量。
市场上主流磁力计是采用惠斯通桥方式的磁阻元件构成;但是由于制造工艺、PCB贴片及使用环境存在磁场等原因,导致磁力计的输出并不是地磁场的反应值,或多或少的存在一些偏差。通常将影响分为:硬磁和软磁;
- 硬铁的影响可等价于三轴零位的改变;
- 软铁的影响等价于三轴标度因数和安装误差的改变;
请注意,磁传感器校准只能补偿手持设备本身产生的硬铁和软铁干扰磁场。 这意味着在校准的整个旋转过程中,硬铁和软铁磁场也会随设备一起旋转!
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 北 | 南 | 南 | 北 | 天 | 天 | 地 | 地 | 北 | 南 | 北 | 南 |
| 天 | 天 | 地 | 地 | 南 | 北 | 北 | 南 | 西 | 东 | 东 | 西 |
| 东 | 西 | 东 | 西 | 东 | 西 | 东 | 西 | 天 | 天 | 地 | 地 |
| 北 | 4 | 2 | 0 | 6 |
| 南 | 4 | 2 | 0 | 6 |
| 地 | 2 | 2 | 2 | 6 |
| 天 | 2 | 2 | 2 | 6 |
| 西 | 0 | 2 | 4 | 6 |
| 东 | 0 | 2 | 4 | 6 |

1、十二位置法:
采用十二位置不对北方法,标定得到在软硬铁影响下的三轴零位、标度因数和安装误差;本质是利用天向磁场。
在加速度计/磁力计标定中,一般采用十二位置标定法,其中十二位置法,包含了了36个轴向,以前上右为载体坐标系;北天东为导航坐标系
以上12位置实验,可以看出:X、Y、Z三轴在每一个方向都存在6次。
2、基于椭球拟合法:
椭球拟合方法的本质是:逆向处理,将磁力计在无干扰的环境中,在空间中随便旋转,其三轴磁力计所测磁场强度矢量和是定值,也即空间中的表征应该是一个圆心为原点,半径为r的圆球;由于存在硬磁和软磁干扰,导致实际数据的表征为一个椭球面,且存在畸点;将磁力计测量数据经过最小二乘/高斯优化等方法拟合之后,得到椭球拟合参数,将参数进行一定的处理,就可以对硬、软磁影响进行补偿。

椭球校准结果:
三、磁航向计算
需要注意的是:计算的磁航向是北偏东为正,角度为【0 360】;同时定义俯仰角抬头为正,横滚角右偏为正;
利用三轴磁力计计算磁航向角主要包括三个步骤:
- 利用三轴加速度计计算姿态角;
- 利用姿态角将磁场强度补偿到水平东北方向;
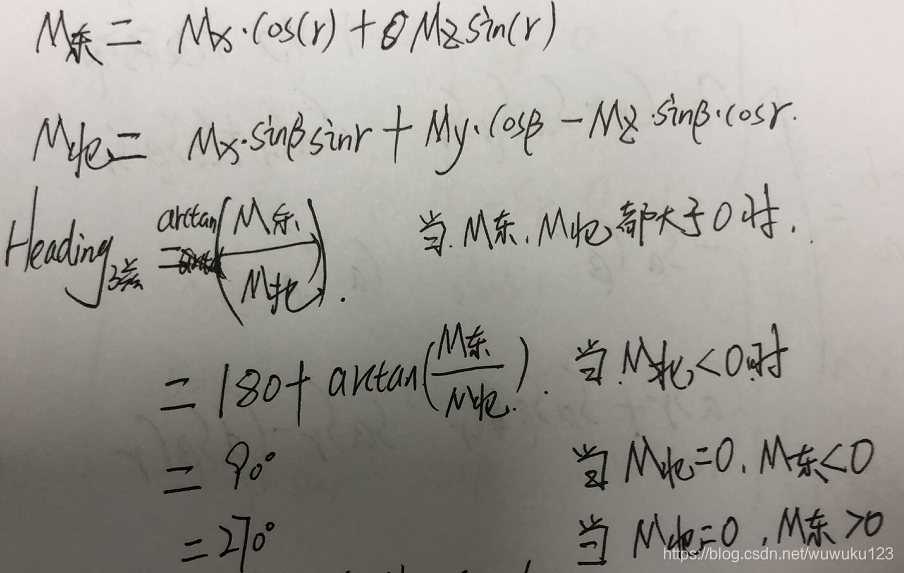
- 利用tan(y/x)计算航向角;
- 根据地理位置,查找当地的磁偏角;
1、本文中载体坐标系为右前上;导航坐标系为东北天;
大部分的论文和datasheet都是以前右下、北东地为载体系和导航系;一种最简单的办法就是将右前上坐标轴变为前右下:
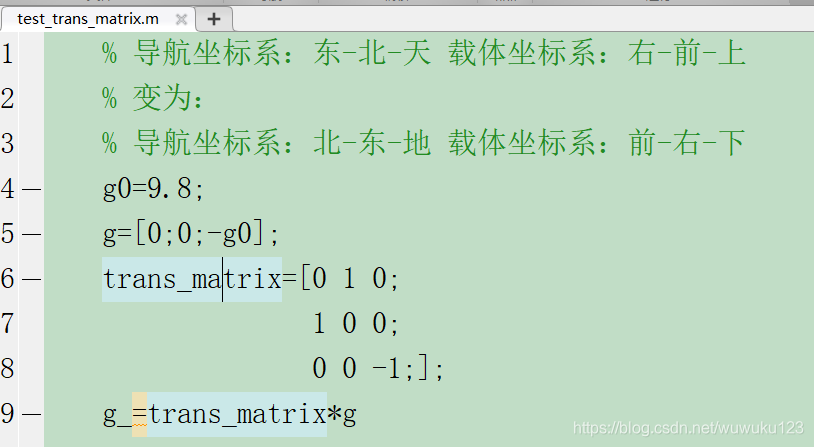
然后将磁力计测量值以及姿态角进行处理,得到水平“东”“北”方向磁场强度,进而计算磁航向角!
2、按照载体坐标系为右前上;导航坐标系为东北天,重新推导得到计算公式:
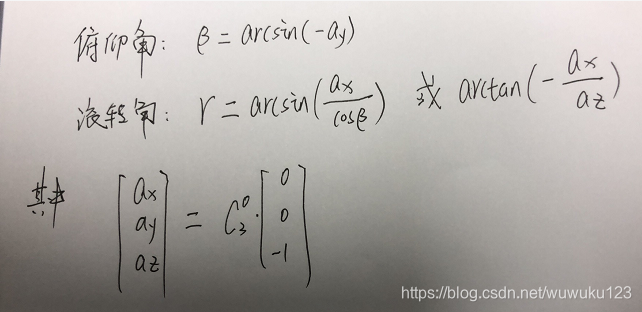
(1)计算水平姿态角:
当把三轴磁力计/加速度计置于水平面时,加速度计三轴敏感值为[0 ; 0; -g];此处及以下计算中,均采用正交化单位值;即在水平面,三轴加速度计(右-前-上放置)敏感值为【0;0 ;-1】;
电子罗盘封装了三轴磁力计和三轴加速度计;此处以电子罗盘代替三轴加速度计进行描述;当把电子罗盘进行三轴旋转时,根据姿态变换矩阵,可以得到旋转后的三轴加速度计输出:
姿态旋转矩阵参考:捷联惯导基础知识解析之一(姿态表示方法基础知识)
如果导航坐标系(以东北天为例)经过三次旋转,旋转顺序为3-1-2,得到载体坐标系;则其表达方式为:
即:0系为导航系、3系为载体坐标系(右前上);即导航系到载体系的方向余弦矩阵:
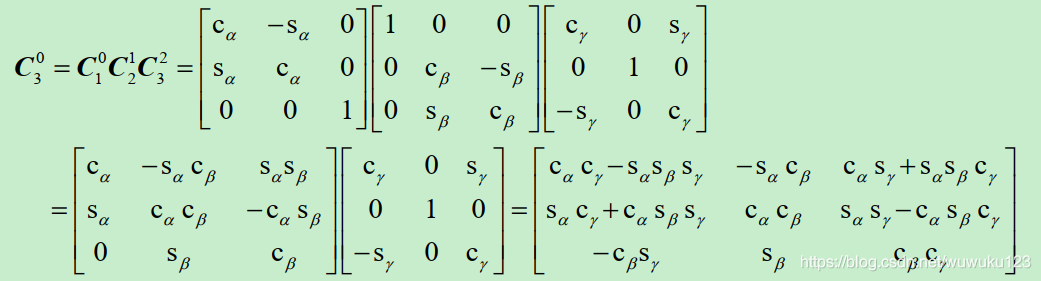
经过计算得到:
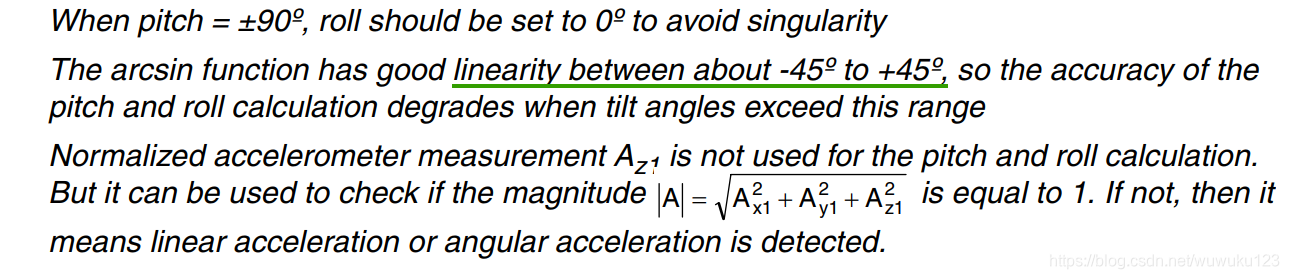
需要注意的点:
(2)计算磁航向角:
利用椭球拟合的参数,校准三轴磁力计的输出,然后将其归一化;然后根据上一步计算得到pitch和roll,计算水平面内的磁场强度;
即当前经过校正(归一化)三轴磁力计输出为[Mx; My; Mz;]; 此时,三轴磁力计可以是测量任意方向的输出,通过加速度计计算出水平姿态角,然后得到tilt Compensation 后的水平东北向输出:
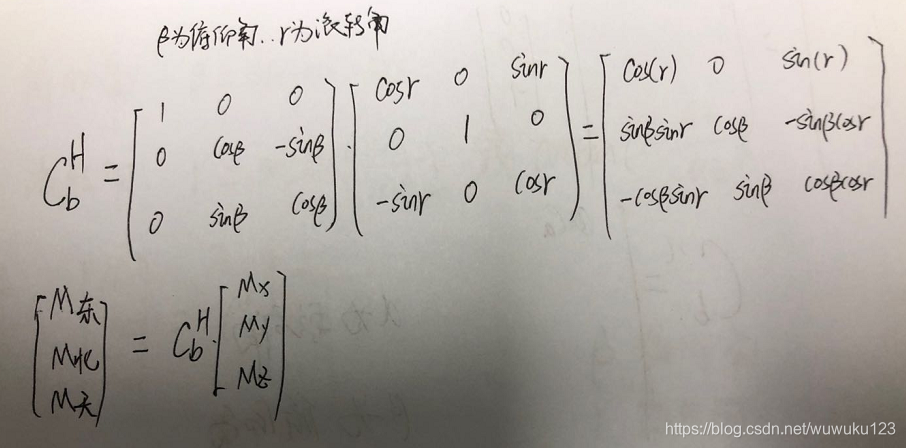
既:(纠正一下,下图中的M东、北这种表述是错的,应该为经过坐标变换之后,水平方向的两个磁场强度;即Mx水平、My水平)
参考:
《自主定位定向技术》
《Applications of Magnetoresistive Sensors in Navigation Systems》
《AN3192 Application note 》
《三轴磁阻式传感器标定方法研究》
《一种十二位置不对北的磁罗盘标定方法》
《基于WMM 2005的地磁计算》

















 3846
3846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









