









根据“无人机航测”这几个字可知,它包含的关键词为:
- 无人机
- 航测
下面我分别介绍这几个关键词
1 无人机的定义
无人机:这里说的“机”是飞机,无人机就是不需要人在飞机上操控,无人机的种类有很多,光是从体积来区别就有大中小型;从飞行方式来说有固定翼、旋翼、混合翼等;从动力来源方面常见的有电力、燃油、太阳能等。
在航测领域,固定翼、旋翼、混合翼都很常用,各有特点,尤其是可以根据飞行高度、任务面积、测区地形来选择适合的无人机。
一般来说,无人机本身的特征有:体积、航高、航速、载荷种类、载荷重量、便携性、滞空时长、定位精度、数据传输模式、控制方式等。
体积
通常来说,无人机翼展越大、体积越大、重量也越大、滞空时间也越长。
定位精度
一般定位模块安装在机身顶部或机身内部,也有的定位模块是独立于机身的,亦有定位模块集成在载荷内的。集成在载荷内的定位模块所获取的POS数据可能会更加准确,因为集成在载荷内的定位模块在读取时间戳时更灵敏、定位天线相位中心和相机中心的偏移距离更加稳定。
数据传输模式
大部分无人机在工作时获取的数据会存储在机身的硬盘中,降落后再取出储存卡拷贝到电脑中;
也有的会实时传输到遥控器等地面站;
现在亦有厂家在测试将数据实时传输到云端并实时处理。
控制方式
常见的固定翼和混合翼无人机的控制方式是地面站控制,一般的地面站是电脑,电脑插上天线就可以连通无人机,可以发送飞行任务至无人机,包括航线、上升和降落时盘旋路径(固定翼)、航高、航速、拍照速度(相机等载荷)、扫描速度(LiDAR等载荷)。固定翼和混合翼的地面站可以检测到无人机的位置、高度、俯仰角等参数,但是受限于无人机和地面站之间的距离(可能有数十公里),一般无法实时获取飞机的第一视角(FPV First Person View)。
常见的旋翼无人机的控制方式是用遥控器控制,常用的是带屏遥控器或者结合手机、平板设备来查看无人机的实时画面。遥控器的机械杆主要用于操控无人机飞行,但是一般在执行任务时不需要机械杆操控,都是自动飞行。遥控器的屏幕主要用于航线规划、监视无人机画面、查看无人机的位置参数、设置载荷的工作参数等。
载荷
载荷是无人机航测系统中的核心模块。
航测中常用的载荷有:
- 普通光学相机
普通的光学相机就是像我们的手机摄像头一样可以拍摄照片、视频 - 多光谱相机
- 高光谱相机
- 激光雷达LiDAR
载荷种类取决于机身的载荷接口,载荷重量取决于机身的飞行能力。
1.1 固定翼、混合翼:
使用场景
大区域航测比如面积大于10km²,这种情况用固定翼或者混合翼较为合适,不管是带状测区还是面状测区,固定翼都能满足航测要求。原因如下,首先是固定翼的飞行高度较高,因此单张航片涵盖的地面面积更大,当然,这个要满足任务的地面分辨率。
常见品牌和型号
航测中常见的固定翼无人机:国内有飞马、纵横等;国外有ebee、镁科众思(Microdrones)等厂家。

飞马V10混合翼无人机

纵横cw-007混合翼无人机
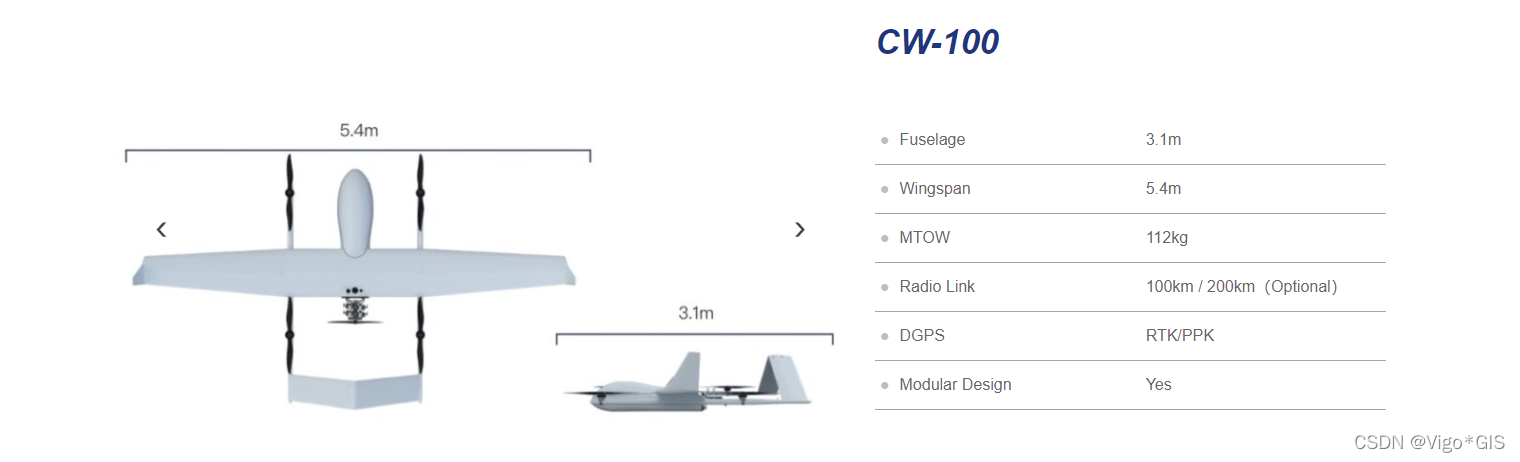
纵横cw-100混合翼无人机

ebee的固定翼航测无人机

镁科众思md4-3000
1.2 旋翼无人机
使用场景
旋翼无人机比固定翼或混合翼更适合小区域航测,比如5km²以内的区域。
旋翼无人机的体积一般都是中小型,按照旋翼数量可以分为8旋翼、6旋翼、4旋翼,一般旋翼数据越大、无人机体积越大,不过也不绝对。
常见的中型旋翼航测无人机,如大疆M300系列,是可折叠的四旋翼
旋翼无人机易收纳,对于起降场的地形要求更低,有些小机型甚至可以在人手中起降,比如大疆精灵4系列无人机。
其他厂家也有中小型旋翼航测无人机,如飞马、哈瓦(涉及军工)等。
常见品牌和型号

大疆M300 RTK

大疆精灵4RTK

飞马 D500

哈瓦旋翼五镜头航测无人机

哈瓦军用旋翼无人机
2 航测
2.1航测的定义
航测,顾名思义就是航空摄影测量。
在无人机上安置摄影测量仪器,比如可见光相机、多光谱相机、激光扫描仪(LiDAR)等。
航测的历史久远,最早的航测可以追溯到在鸽子胸前放一个定时拍照的微型相机。
接下来是有人飞机,二战的适合曾应用于搜集战场信息,类似于今日的间谍卫星。
后来才用于摄影测量,进行地形测绘。
随着无人机技术的发展,轻小型无人机的生产成本和使用难度降低,促进了无人机摄影测量的发展。
2.2航测的特点:
1.无人机航测具有高空间分辨率、大比例尺、高现势性的特点,适合小区域高精度项目,尤其是带状区域(如公路、铁路、河流、海岸线等)、地形落差较大的区域(旋翼无人机比固定翼无人机更合适);
2.外业工作简洁、无人机起降方便,对降落场要求较小;
3.无人机操作简单,硬件成本和人工低;
4.数据处理方便,市场有很多成熟的摄影测量软件,可用于生产DEM/DOM/DLG/DRG和倾斜模型等数据产品。
2.3 航测生产的4D产品
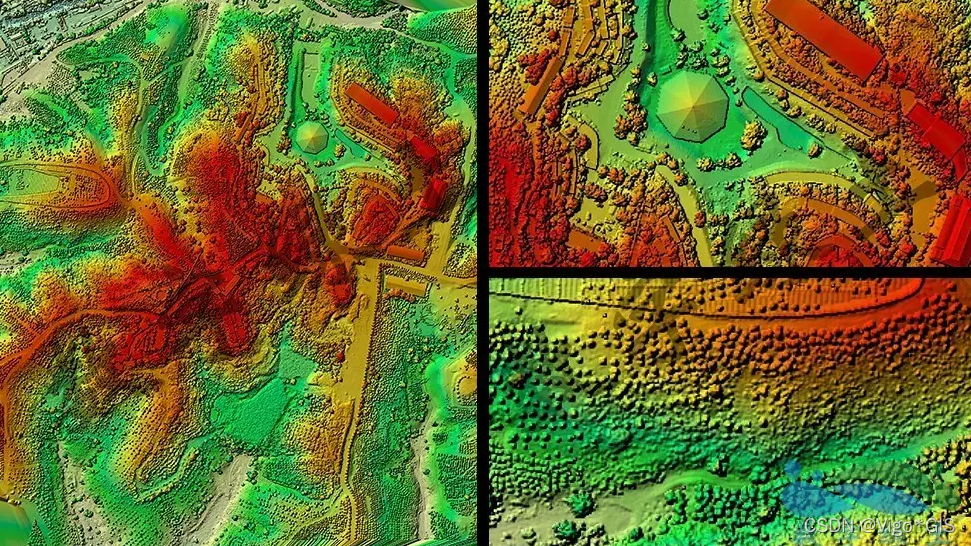
DSM 数字地貌模型(严格来说不属于4D产品)
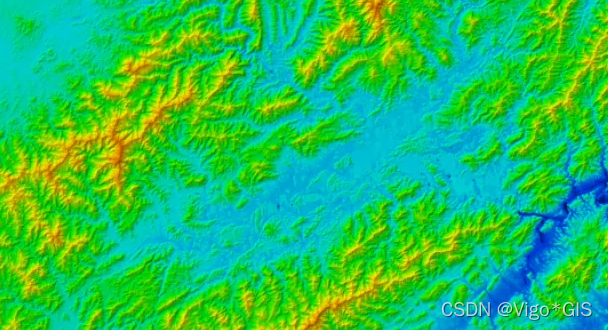
DEM 数字高程模型
DEM和DSM的区别是DSM上面有很多地物,比如树木、房屋等,DEM是真实地形

DOM 数字正射影像

DLG 数字线划图,现有地形图上基础地理要素分层存储的矢量数据集

DRG 数字栅格图,是纸制地形图的栅格形式的数字化产品
3无人机航测系统组成
表中内容依据事实机型为准
| 硬件部分 | 内容 |
|---|---|
| 动力系统 | 电池/内燃机、螺旋桨、机翼 |
| 机身核心处理平台 | 飞控 |
| 定位系统 | GNSS接收机 |
| 任务载荷 | 各种相机 |
| 地面控制系统 | 遥控器、地面站 |
| 弹射与回收系统 | 手抛、弹射架、降落伞 |
在无人机航测中这些都很重要,但是一般用不上,除非自己组装无人机。
但是现在的无人机航测大部分都是买成熟的机型,成熟的电池系统、成熟的载荷系统。
在航测无人机中需要关注的两个精度:定位精度和航片的空间分辨率精度。
定位模块一般集成在机身内部或上部,也有装在无人机机翼上的,一个无人机上面装多个GNSS模块也可以提高整体的定位精度。
空间分辨率取决于载荷的CMOS参数和航高。具体公式如下
H= f × GSD / α
式中:
H:相对航高
f:相机焦距
GSD(Ground Sampling Distance地面采样间隔–地面分辨率)
α:CMOS中的像元尺寸
假设地形平坦,像素大小为2.4um,焦距为8.8mm,GSD=5cm,则:
H=50*8.8/0.0024=18333mm=183m


















 1705
1705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











