









 本文详细介绍了如何在Ubuntu系统中安装StaMPS,包括先安装MATLAB和必要的依赖工具包,然后下载StaMPS安装包,通过编译和配置环境变量来完成安装。最后,文章提到了在MATLAB中设置路径的步骤,以及验证安装成功的办法。
本文详细介绍了如何在Ubuntu系统中安装StaMPS,包括先安装MATLAB和必要的依赖工具包,然后下载StaMPS安装包,通过编译和配置环境变量来完成安装。最后,文章提到了在MATLAB中设置路径的步骤,以及验证安装成功的办法。
Ubuntu中安装StaMPS
0 StaMPS简介
官网:https://homepages.see.leeds.ac.uk/~earahoo/stamps/
A software package to extract ground displacements from time series of synthetic aperture radar (SAR) acquisitions.
The original version was developed at Stanford University but subsequent development has taken place at the University of Iceland, Delft University of Technology and the University of Leeds.
The package incorporates persistent scatterer and small baseline methods plus an option to combine both approaches.
- Andy Hooperhttp://www.see.leeds.ac.uk/people/a.hooper
School of Earth and Environment
University of Leeds
Leeds LS2 9JT
1 首先安装好MATLAB,安装一些依赖工具包
安装MATLAB请参阅Ubuntu中安装matlab2020a
https://blog.csdn.net/qq_41159191/article/details/129294717?spm=1001.2014.3001.5501
- 安装一些matlab插件和StaMPS会用到的工具
>>> sudo apt-get update # 先更新一波
gawk >>>>>>>>>>>>> sudo apt-get install gawk
tcsh >>>>>>>>>>>>>sudo apt-get install tcsh
matlab-support>>> sudo apt-get install
Make>>> sudo apt-get make
build essential >> sudo apt-get install build-essential
tringle>> sudo apt-get install triangle-bin
snaphu>> I personally recommend the latest version 2.0.5
2 安装StaMPS
2.1 下载StaMPS安装包
2.2 安装
解压,打开到src文件夹
- 打开terminal
sudo make
sudo make install
2.3 配置环境
返回到StaMPS主文件夹并编辑StaMPS_CONFIG.bash文件
sudo gedit StaMPS_CONFIG.bash

- 编辑这个文件,修改里面插件的路径
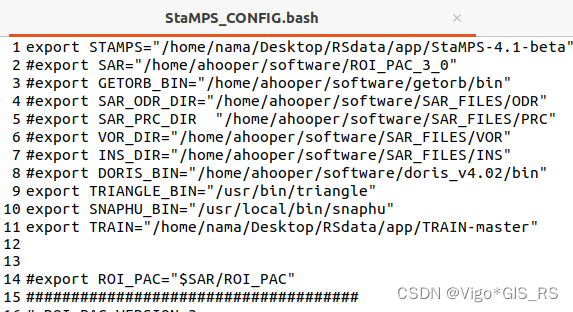
** 有哪些插件就写哪些插件**
export STAMPS="/home/nama/Desktop/RSdata/app/StaMPS-4.1-beta"
#export SAR="/home/ahooper/software/ROI_PAC_3_0"
#export GETORB_BIN="/home/ahooper/software/getorb/bin"
#export SAR_ODR_DIR="/home/ahooper/software/SAR_FILES/ODR"
#export SAR_PRC_DIR "/home/ahooper/software/SAR_FILES/PRC"
#export VOR_DIR="/home/ahooper/software/SAR_FILES/VOR"
#export INS_DIR="/home/ahooper/software/SAR_FILES/INS"
#export DORIS_BIN="/home/ahooper/software/doris_v4.02/bin"
export TRIANGLE_BIN="/usr/bin/triangle"
export SNAPHU_BIN="/usr/local/bin/snaphu"
export TRAIN="/home/nama/Desktop/RSdata/app/TRAIN-master"
#export ROI_PAC="$SAR/ROI_PAC"
#####################################
# ROI_PAC VERSION 3
#####################################
#export INT_BIN="$ROI_PAC/INT_BIN"
#export INT_SCR="$ROI_PAC/INT_SCR"
#####################################
#####################################
# ROI_PAC VERSION 2.3 and before
#####################################
#set MACH=`uname -s`
#if ($MACH == "HP-UX") then
# export ARCHC=HP
#else if ($MACH == "IRIX") then
# export ARCHC=SGI
#else if ($MACH == "SunOS") then
# export ARCHC=SUN
#else if ($MACH == "Linux") then
# export ARCHC=LIN
#else if ($MACH == "Darwin") then
# export ARCHC=MAC
#fi
#export INT_LIB="$ROI_PAC/LIB/$ARCHC"
#export INT_BIN="$ROI_PAC/BIN/$ARCHC"
#export FFTW_LIB="$SAR/FFTW/$ARCHC""_fftw_lib"
#####################################
#####################################
# shouldn't need to change below here
#####################################
#export MY_BIN="$INT_BIN"
export MATLABPATH=$STAMPS/matlab:`echo $MATLABPATH`
#export DORIS_SCR="$STAMPS/DORIS_SCR"
# Needed for ROI_PAC (a bit different to standard)
### use points not commas for decimals, and give dates in US english
export LC_NUMERIC="en_US.UTF-8"
export LC_TIME="en_US.UTF-8"
#export MY_SAR="$SAR"
#export OUR_SCR="$MY_SAR/OUR_SCR"
#export MY_SCR="$STAMPS/ROI_PAC_SCR"
export SAR_TAPE="/dev/rmt/0mn"
#export PATH=${PATH}:$STAMPS/bin:$MY_SCR:$INT_BIN:$INT_SCR:$OUR_SCR:$DORIS_SCR:$GETORB_BIN:$DORIS_BIN:$TRIANGLE_BIN:$SNAPHU_BIN
** 这个要和最前面的对应上**
export PATH=${PATH}:$STAMPS/bin:$TRIANGLE_BIN:$SNAPHU_BIN:$TRAIN
export PATH=${PATH}:$STAMPS/bin:$MATLABPATH
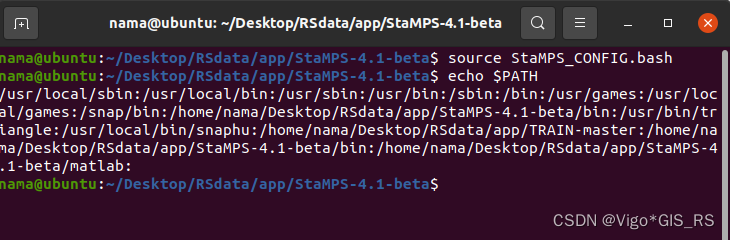
编辑好了之后,就source和echo
在StaMPS-4.1-beta文件夹中打开terminal
source StaMPS_CONFIG.bash
# 查看环境变量
echo $PATH
如下图则没问题,其中:为间隔符
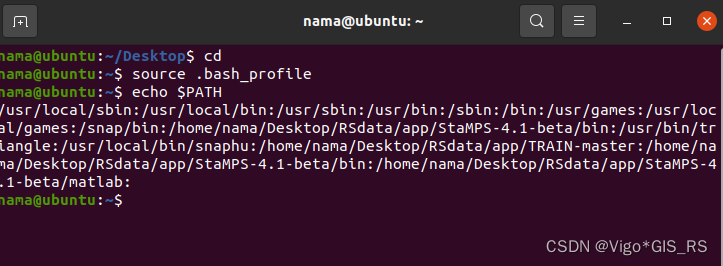
- StaMPS_CONFIG.bash 在StaMPS软件中,每一次启动的有效期保持到terminal关闭前,因此,最好是在系统文件夹的根目录设置一个环境变量。
- 在桌面打开terminal
touch .bash_profile
- 把StaMPS_CONFIG.bash中的内容复制过去,保存,然后
source .bash_profile
# 查看环境变量
echo $PATH
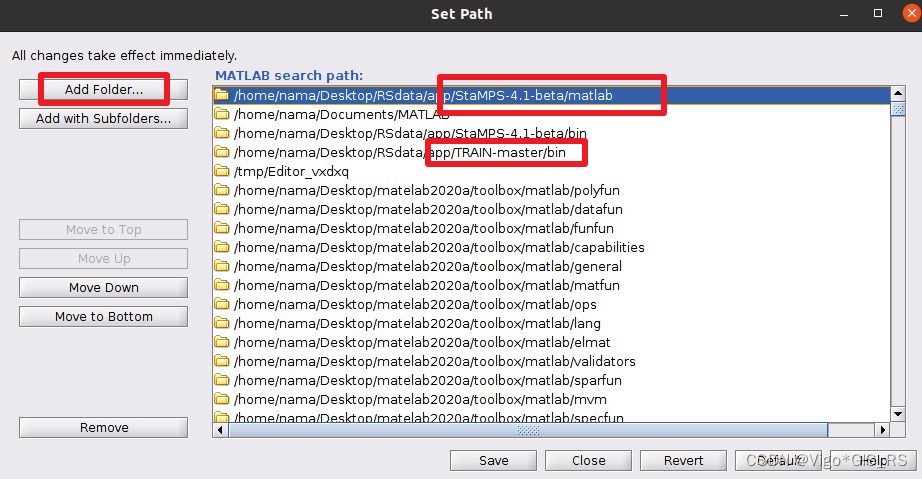
2.4 matlab中的路径设置
- 在matlab中加载红框所示路径
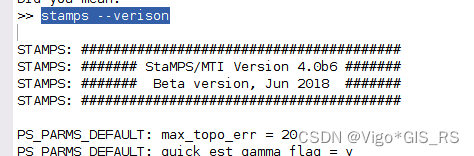
- 在command Windows中输入
stamps --verison,出现此图表示安装成功。
感谢阅读!


















 1044
1044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











