







OpenCV Canny边缘检测
1、什么是边缘检测
在计算机视觉领域,我们经常会用到边缘检测算法,从而提取我们想要的边界数据,例如人脸检测,行人检测等等。所以我们这里主要讲一下Canny这个边缘检测算法。
2、Canny边缘检测
具体流程:
- 高斯滤波:平滑图像,消除噪声
- 梯度和方向计算:利用Sobel算子计算每个像素点的梯度和方向
- 非极大值抑制:消除边缘检测带来的杂散相应
- 双阈值:检测真正和潜在的边缘
- 抑制弱边缘:通过抑制弱边缘来完成边缘检测
2.1、高斯滤波
高斯滤波最重要的还是卷积核核,通常使用高斯平滑滤波器卷积降噪,这里以size=3的高斯内核为例:这里做了归一化处理(元素和为 1)
H = [ 0.0924 0.1192 0.0924 0.1192 0.1538 0.1192 0.0924 0.1192 0.0924 ] H = \begin{bmatrix} 0.0924 & 0.1192 & 0.0924 \\ 0.1192 & 0.1538 & 0.1192 \\ 0.0924 & 0.1192 & 0.0924 \end{bmatrix} H=⎣⎡0.09240.11920.09240.11920.15380.11920.09240.11920.0924⎦⎤
e = H ∗ A = [ h 11 h 12 h 12 h 21 h 22 h 22 h 31 h 32 h 32 ] ∗ [ a b c d e f g h i ] = s u m ( [ a × h 11 b × h 11 c × h 11 d × h 21 e × h 21 f × h 21 g × h 31 h × h 31 i × h 31 ] ) e = H * A = \begin{bmatrix} h_{11} & h_{12} & h_{12} \\ h_{21} & h_{22} & h_{22} \\ h_{31} & h_{32} & h_{32} \end{bmatrix} * \begin{bmatrix} a & b & c \\ d & e & f \\ g & h & i \end{bmatrix} = sum( \begin{bmatrix} a \times h_{11} & b \times h_{11} & c \times h_{11} \\ d \times h_{21} & e \times h_{21} & f \times h_{21} \\ g \times h_{31} & h \times h_{31} & i \times h_{31} \end{bmatrix} ) e=H∗A=⎣⎡h11h21h31h12h22h32h12h22h32⎦⎤∗⎣⎡adgbehcfi⎦⎤=sum(⎣⎡a×h11d×h21g×h31b×h11e×h21h×h31c×h11f×h21i×h31⎦⎤)
2.2、Sobel算子计算梯度和方向
计算方法:
G x = [ − 1 0 1 − 2 0 2 − 1 0 1 ] G y = [ − 1 − 2 − 1 0 0 0 1 2 1 ] G_x = \begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \\ \end{bmatrix} \qquad G_y = \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \\ \end{bmatrix} Gx=⎣⎡−1−2−1000121⎦⎤Gy=⎣⎡−101−202−101⎦⎤
这里 G x G_x Gx是指水平方向的掩码模板, G y G_y Gy是指垂直方向的掩码模板。根据上面的模板可以计算出图像梯度幅值和方向。
G = G x 2 + G Y 2 θ = a r c t a n ( G y / G x ) G = \sqrt{G_x^2 + G_Y^2}\qquad \theta = arctan(G_y/G_x) G=Gx2+GY2θ=arctan(Gy/Gx)
2.3、非极大值抑制
非极大值抑制是进行边缘检测的重要步骤,通俗的来说,就是获取局部的最大值,将非极大值所对应的灰度值设置为背景像素点。像素邻近区域满足梯度值的局部最优值判断为该像素的边缘,对非极大值相关信息进行抑制。利用这个准则可以剔除大部分的非边缘点。
简单的说呢?就是保留梯度大的像素点点,对于那些在边缘旁边的杂散点,梯度相对较小,利用非极大值抑制就可以很好的去除杂散点。
2.4、双阈值检测
这里的双阈值并不是说介于阈值之间的像素保留,外面的的去除。这里的阈值检测有所不同。
分析:
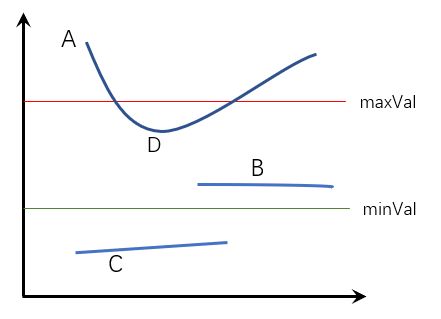
- 梯度大于maxVal的像素点保留,视为边缘
- 梯度小于minVal的像素点弃用,不视为边缘
- 梯度介于两者之间的,分情况判断:
- 四周有包含大于maxVal的像素点,视为边缘
- 四周没有大于maxVal的像素点,不视为边缘
根据上面的分析,我们可以得出来:A, D点位边界; B, C点不是边界。
注意:
具体这两个值怎么设置,我们就要分析两个值变化对图像的影响。
-
maxVal: 带来最明显的差异,增大maxVal无疑会导致原来的边界点可能会直接消失。但这种消失时是成片消失。
-
minVal: 增大minVal,会导致有些待定像素点被弃用,也就是靠近边界像素点的介于双阈值之间的被弃用。导致的现象就是边界出现破损,这种非成片消失。只是边界信息不完整。
下面以 video = cv2.Canny(img, 80, 250) 为例:分别增大minVal和maxVal。
增大minVal: (边界出现缺损)

增大maxVal: (边界出现成片消失,边界信息完整)

总结:
在实际应用中,观察梯度图像,如果边界信息缺损,那么适当的减小minVal;如果有不想要的区域出现,那么适当的增加MaxVal。
最后
更多精彩内容,大家可以转到我的主页:曲怪曲怪的主页
或者关注我的微信公众号:TeaUrn
或者扫描下方二维码进行关注。里面有惊喜等你哦。















 6529
6529











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









