





 本文详细描述了如何在Simulink中逐步搭建模型,包括使用Mux和Fcn模块(早期版本可用),通过积分项连接公式,并关注期望输入对控制效果的影响。作者参考了德狗的教程进行独立搭建。
本文详细描述了如何在Simulink中逐步搭建模型,包括使用Mux和Fcn模块(早期版本可用),通过积分项连接公式,并关注期望输入对控制效果的影响。作者参考了德狗的教程进行独立搭建。
1.待搭建的模型
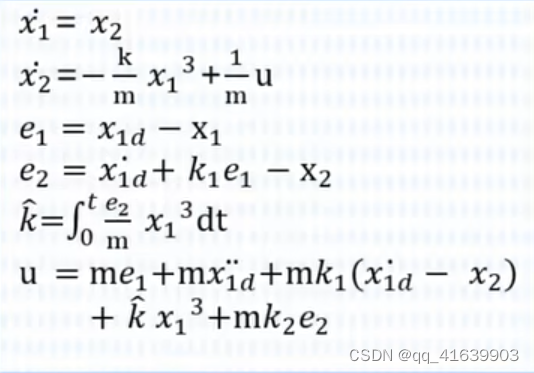
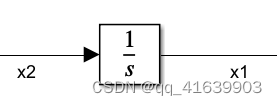
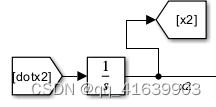
1.1首先搭建第一个公式
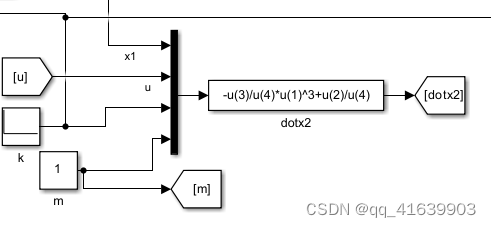
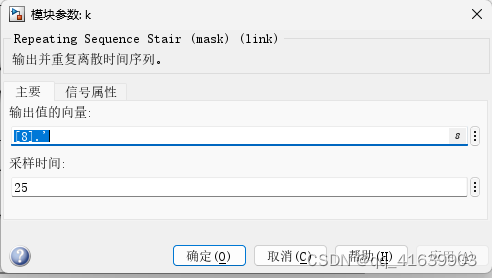
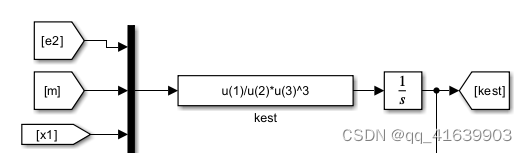
1.2第二个公式等式左边为输入,右边为输入,输入有k、m、x1、u四个参数
工具:Mux模块和Fcn模块(2021版本之后是没有的,可以在以前的版本中搭建的Simulink模型复制过来
1.3 将1.1和1.2通过积分项连接到一起
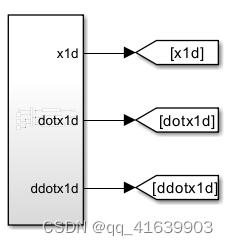
1.4下面的四个公式都涉及到期望输入

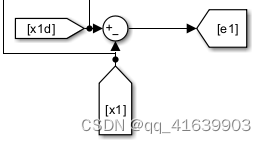
1.5公式3
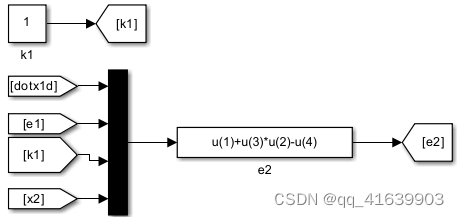
1.6公式4
同样有4个输入dotx1d \k1 \e1\x2四个输入信号
1.7公式5
1.8公式6

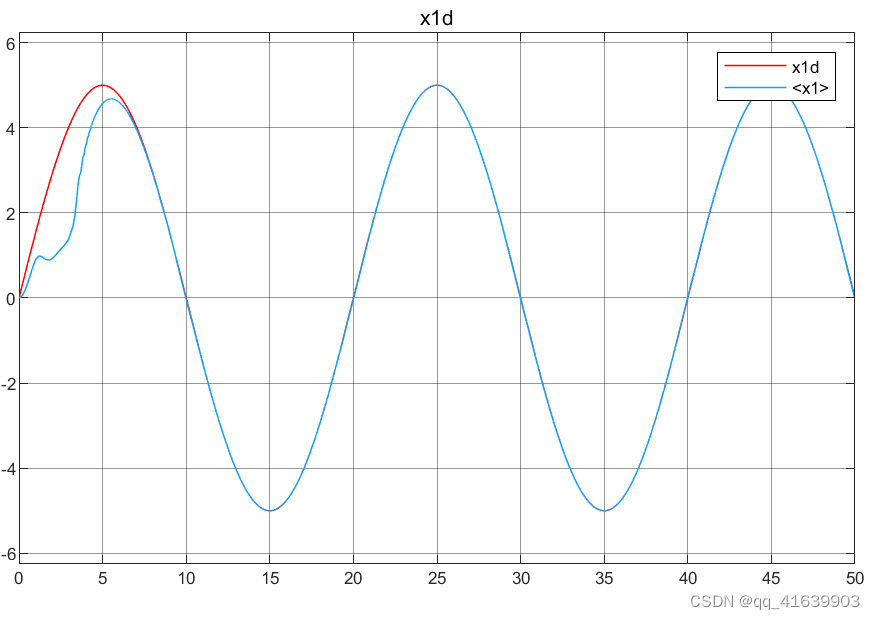
1.9控制效果
说明:本仿真是跟着up主:德狗追求独立搭建

1.待搭建的模型
1.1首先搭建第一个公式
1.2第二个公式等式左边为输入,右边为输入,输入有k、m、x1、u四个参数
工具:Mux模块和Fcn模块(2021版本之后是没有的,可以在以前的版本中搭建的Simulink模型复制过来
1.3 将1.1和1.2通过积分项连接到一起
1.4下面的四个公式都涉及到期望输入
1.5公式3
1.6公式4
同样有4个输入dotx1d \k1 \e1\x2四个输入信号
1.7公式5
1.8公式6
1.9控制效果
说明:本仿真是跟着up主:德狗追求独立搭建
 3696
3385
3696
3385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























