






利用c++ boost库求解一阶微分方程计算船舶运动_河北一帆的博客-CSDN博客_c++求解微分方程
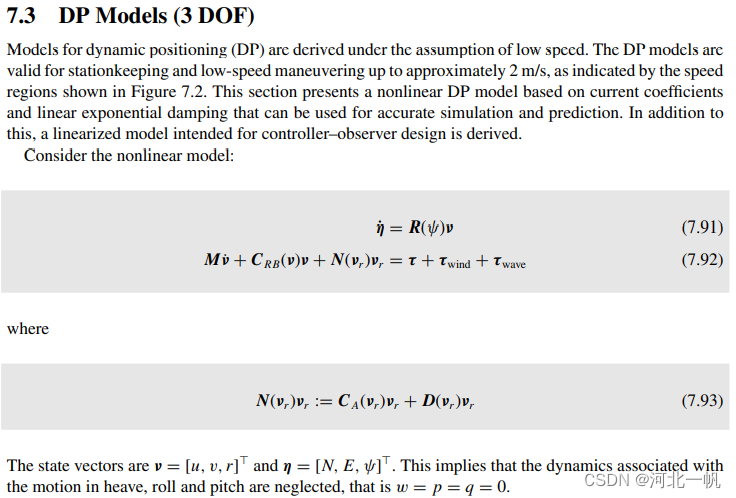
这篇博文中利用boost库求解线性三自由度船舶运动模型。但是boost库非常庞大,达到好几个G,不如自己写一个龙格库塔求解。网上搜索到的例子大多数是一维微分方程的,推广到三维其实很容易。三自由度船舶运动模型如下所示。
一维微分方程
四阶龙格库塔计算公式为
是求解步长。 对于推广到三维,直接将三维向量
替换
double h = 0.1;
double dt = 1;
Eigen::Vector3d nu_;
nu_ << this->nu[0], this->nu[1], this->nu[2];
for (int i = 0; i < 10; i++) {
Eigen::Vector3d K1 = this->f(nu_, tau);
Eigen::Vector3d K2 = this->f(nu_ + 0.5 * h * K1, tau);
Eigen::Vector3d K3 = this->f(nu_ + 0.5*h*K2, tau);
Eigen::Vector3d K4 = this->f(nu_ + h * K3, tau);
nu_ = nu_ + h / 6 * (K1 + 2 * K2 + 2 * K3 + K4);
}
Eigen::Vector3d mss::Vessel::f(Eigen::Vector3d y, Eigen::Vector3d F) {
return this->M.inverse() * (-this->D * y + F);
}














 1430
1430











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









