







本博客用来记录学习ATKflight固件的学习过程,本人萌新,大佬们可以参考参考。
本文默认已经了解FreeRTOS操作系统并且会简单的使用方法,如果读者没了解过,建议先看正点原子的FreeRTOS教程视频学习一下,毕竟ATKflight固件使用了操作系统,个人感觉使用带操作系统的工程更加接近于实际生活,建议大家多多尝试。
第一部分
LED驱动代码
咱先从简单的开始,先看懂LED灯的驱动代码。
代码位置:…\悟空四轴飞行器光盘\悟空四轴飞行器光盘资料包\3. 程序源\ATKflight\Firmware_F405 V1.2\src\drivers
在keil5中的位置:
我们先看led.h这个头文件,看看有什么函数
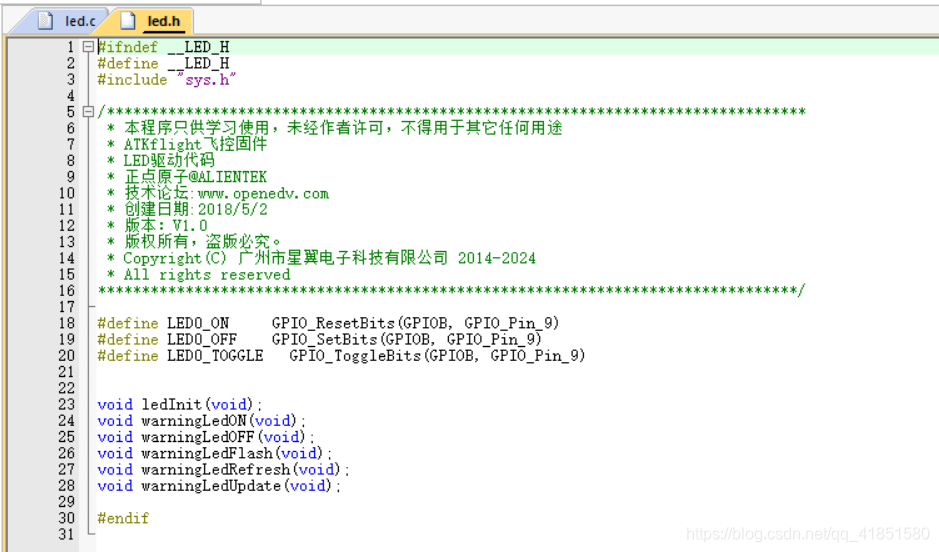
可以看到有6个函数,我们逐一解析一下。
void ledInit(void);
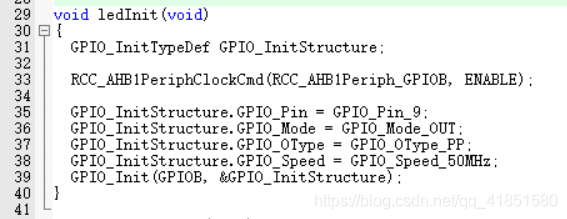
这个函数很简单,只是初始化了控制LED灯的IO引脚。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1583
1583

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









