







文章目录
本博客对应我博客中的 多变量微积分目录下的第三章,二重积分。
3. 多重积分——二重积分(Double Integrals)
上一章讲到多元函数的微分及其应用,这一章是关于多重积分里的二重积分,虽然只是限定在了平面范围内,但是非常非常重要。
3.1 直角坐标系下二重积分
二重积分的定义
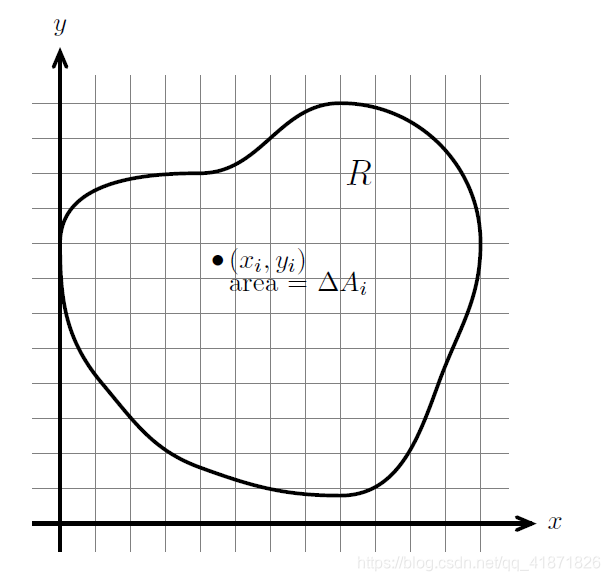
现有一积分区域
R
R
R和某函数
f
(
x
,
y
)
f(x,y)
f(x,y),将该区域切割成
n
n
n块小面积,其中第
i
i
i块的面积为
Δ
A
i
\Delta A_i
ΔAi,并且在该区域内选择一个点
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi),那么有限项和
∑
i
n
f
(
x
i
,
y
i
)
Δ
A
i
\sum_i^n f(x_i,y_i)\Delta A_i
∑inf(xi,yi)ΔAi在面积元接近无穷小时的极限被定义为二重积分(参考下图),即:
∬
R
f
(
x
,
y
)
d
A
=
lim
Δ
A
i
→
0
∑
i
n
f
(
x
i
,
y
i
)
Δ
A
i
\iint_Rf(x,y)dA=\lim_{\Delta A_i\to 0}\sum_i^n f(x_i,y_i)\Delta A_i
∬Rf(x,y)dA=ΔAi→0limi∑nf(xi,yi)ΔAi
可以发现,如果函数
f
(
x
,
y
)
f(x,y)
f(x,y)是某一物体的高度函数,二重积分可以用来求该物体的体积;当
f
(
x
,
y
)
=
1
f(x,y)=1
f(x,y)=1时,二重积分
∬
R
d
A
\iint_R dA
∬RdA 求的是积分区域的面积。(常见的二重积分应用会在3.4节中提到)
如何选择积分上下限
在多重积分当中,最重要的就是明确积分的上下限,通常情况下需要先画出所求区域的草图。
一般步骤
- 写出完整的二重积分表达式
∬ R f ( x , y ) d y d x o r ∬ R f ( x , y ) d x d y \iint_Rf(x,y)dydx\quad or\quad\iint_Rf(x,y)dxdy ∬Rf(x,y)dydxor∬Rf(x,y)dxdy - 根据内部积分的顺序,选择固定的轴, x x x或 y y y,作垂直于所选轴的垂线,如果固定的是 x x x轴,那么积分上下限一般表达式为 y 1 = g 1 ( x ) , y 2 = g 2 ( x ) y_1=g_1(x),\ y_2=g_2(x) y1=g1(x), y2=g2(x),选择 y y y轴的情况同理。
- 如果第二步中固定的是 x x x轴,将 x x x当成常数对变量 y y y积分(步骤与单变量几分钟的步骤完全一样)
- 对外层变量 x x x 积分
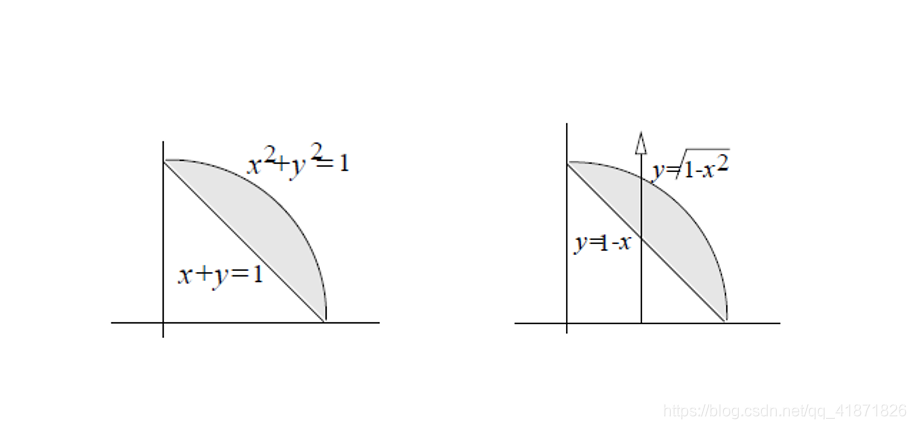
举例如下图:求曲线
x
+
y
=
1
x+y=1
x+y=1与
x
2
+
y
2
=
1
x^2+y^2=1
x2+y2=1在第一象限所围成的面积,可以看出,例子中选择的是先固定变量
x
x
x。
3.2 极坐标下的二重积分
在单变量微积分中我们已经学过了极坐标和直角坐标系的转换,即 x = r cos θ , y = r sin θ x=r\cos\theta,\ y=r\sin\theta x=rcosθ, y=rsinθ。当所求积分区域为圆或圆的衍生图形的时候常用极坐标。
微元及二重积分表达式
微元表达式
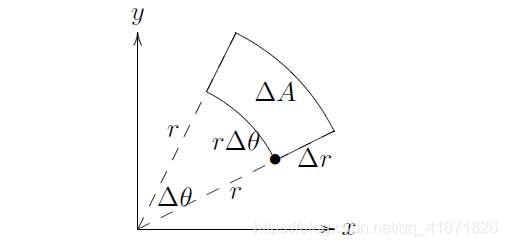
如下图,将二维区域
R
R
R按极坐标的模式切割成不同小块,每一个小块的面积表达式为
Δ
A
=
r
Δ
θ
⋅
Δ
r
\Delta A=r_\Delta\theta\cdot \Delta r
ΔA=rΔθ⋅Δr,转化成微元形式就是
d
A
=
r
d
r
d
θ
dA=rdrd\theta
dA=rdrdθ,可以看出,极坐标下的面积元与矩形面积公式相似,因为在面积无穷小的时候弧长会近似成直线。
二重积分表达式
极坐标下的二重积分形式为:
∬
R
f
(
r
,
θ
)
r
d
r
d
θ
=
lim
Δ
A
i
→
0
∑
i
n
f
(
r
i
,
θ
i
)
Δ
A
i
\iint_Rf(r,\theta)rdrd\theta=\lim_{\Delta A_i\to 0}\sum_i^n f(r_i,\theta_i)\Delta A_i
∬Rf(r,θ)rdrdθ=ΔAi→0limi∑nf(ri,θi)ΔAi
如何选择积分上下限
与直角坐标系中选择积分上下限类似,一般在极坐标中先固定角度
θ
\theta
θ。
一般步骤:
- 写出完整的二重积分表达式:
∬ R f ( r , θ ) r d r d θ \iint_Rf(r,\theta)rdrd\theta ∬Rf(r,θ)rdrdθ - 固定角度 θ \theta θ,作过原点的一条直线,找到内部积分上下限的一般表达式, r 1 = g 1 ( θ ) , r 2 = g 2 ( θ ) r_1=g_1(\theta),\ r_2=g_2(\theta) r1=g1(θ), r2=g2(θ),之后求出内部积分表达式。
- 找到变量 θ \theta θ的上下限并对外层变量 θ \theta θ 积分
3.3 二重积分中的换元方法
直角坐标系与极坐标之间的转化
根据所选积分区域的形状选择不同的坐标系会有不同的效果,起到简化计算的作用。首先是最常见的直角坐标与极坐标的转化。
∬
R
f
(
x
,
y
)
d
y
d
x
=
∬
R
f
(
r
,
θ
)
r
d
r
d
θ
\iint_R f(x,y)dydx=\iint_Rf(r,\theta)rdrd\theta
∬Rf(x,y)dydx=∬Rf(r,θ)rdrdθ
其中各个变量的对应关系是
x
=
r
cos
θ
,
y
=
r
sin
θ
,
r
=
x
2
+
y
2
,
θ
=
t
a
n
−
1
y
x
x=r\cos\theta,\ y=r\sin\theta,\ r=\sqrt{x^2+y^2},\ \theta=tan^{-1}\frac{y}{x}
x=rcosθ, y=rsinθ, r=x2+y2, θ=tan−1xy
Jacobian行列式
Jacobian行列式是变量变换的一般形式,这一节只有表达形式,我觉得这个行列式非常美妙,所以具体的证明过程等我之后再补上!本节只考虑Jacobian的二维形式,其定义式为:
∂
(
x
,
y
)
∂
(
u
,
v
)
=
∣
x
u
x
v
y
u
y
v
∣
\frac{\partial(x,y)}{\partial (u,v)}=\begin{vmatrix}x_u&x_v\\y_u&y_v\end{vmatrix}
∂(u,v)∂(x,y)=∣∣∣∣xuyuxvyv∣∣∣∣
一般化的变量转化为:
d
A
=
∣
∂
(
x
,
y
)
∂
(
u
,
v
)
∣
d
u
d
v
dA=\big|\frac{\partial(x,y)}{\partial (u,v)}\big|dudv
dA=∣∣∂(u,v)∂(x,y)∣∣dudv
直角坐标到极坐标的转化也可以通过Jacobian计算出来。
3.4 标量函数中二重积分的应用
在标量函数中,二重积分有许多应用:在不考虑厚度的情况下,已知密度求物体的质量;;求物体质心的位置;求物体的转动惯量。
质量
已知物体的密度
δ
(
x
,
y
)
\delta(x,y)
δ(x,y)在某一区域
R
R
R 内是连续的,则质量为:
Mass
=
∬
R
δ
(
x
,
y
)
d
y
d
x
\text{Mass}=\iint_R\delta(x,y)dydx
Mass=∬Rδ(x,y)dydx
均值和质心
在单变量微积分中,积分的一个应用是求均值和加权平均值。同样地,二重积分也可以用来求均值,一般表达式为:
Average
=
1
area
R
∬
R
f
(
x
,
y
)
d
A
\text{Average}=\frac{1}{\text{area} \ R}\iint_Rf(x,y)dA
Average=area R1∬Rf(x,y)dA
当
f
(
x
,
y
)
=
x
f(x,y)=x
f(x,y)=x或
f
(
x
,
y
)
=
y
f(x,y)=y
f(x,y)=y时就是求一个物体的质心位置。假设密度依然为
δ
(
x
,
y
)
\delta(x,y)
δ(x,y),则质心(Center of Mass)表达式为:
x
c
m
=
∬
R
x
δ
(
x
,
y
)
d
A
x_{cm}=\iint_Rx\delta(x,y)dA
xcm=∬Rxδ(x,y)dA
y
c
m
=
∬
R
y
δ
(
x
,
y
)
d
A
y_{cm}=\iint_Ry\delta(x,y)dA
ycm=∬Ryδ(x,y)dA
二维平面内的转动惯量
转动惯量相当于旋转刚体的质量(写到这突然觉得今晚上得复习一下经典力学中的旋转刚体了,力矩等概念已经记不得了),对于对称的物体而言,
I
=
m
d
2
I=md^2
I=md2。
m
m
m是物体的质量(不规则的物体需要用积分的方法求解),
d
d
d是物体到转轴的距离。如果密度为
δ
(
x
,
y
)
\delta(x,y)
δ(x,y)的物体绕
y
y
y轴旋转,其转动惯量就可以写成:
I
=
∬
x
2
δ
(
x
,
y
)
d
A
I=\iint x^2\delta(x,y)dA
I=∬x2δ(x,y)dA
3.5 矢量场及矢量场中的积分
矢量场回顾
在笔记第二章最后中已经介绍了什么是矢量场和标量场,由于这一章关注的是二维平面,所以矢量场就特指平面向量场,其表达式为 F ( x , y ) = M ( x , y ) i + N ( x , y ) j \bold F(x,y)=M(x,y)\bold i+N(x,y) \bold j F(x,y)=M(x,y)i+N(x,y)j如果函数 M , N M,\ N M, N是可微的,则向量场可微。
梯度场和势场——矢量场和标量场的转化
如果某一个二维标量函数 w = f ( x , y ) w=f(x,y) w=f(x,y)是连续可导的, 则它的梯度场可以表示为 ∇ w = ∂ w ∂ x i + ∂ w ∂ y j \nabla w=\frac{\partial w}{\partial x}\bold i+\frac{\partial w}{\partial y}\bold j ∇w=∂x∂wi+∂y∂wj
(请牢记梯度的性质,梯度垂直于等值面的切线)
如果一个向量场是某个势函数的梯度,则这个向量场就被称为梯度场。梯度场是保守场,即做功与路径无关。(常见的梯度场有电场,重力场等)做工只与起始和终止点有关。下文也会详细阐述关于保守场的几个等价命题
常见的矢量场
矢量场广泛应用于物理学中,描述力场,比如静电力场,重力场;或者是描述流体,比如不可压缩的水流和可压缩的气体的流速(单位时间内经过的量等)。
矢量场中的积分1——线积分(Line Integrals)
当平面内有一力场时,线积分表达的物理意义就是力做功的多少。
A. 功(Work)
在物理学中,功是计算力在位移上的分量和位移的乘积而得到的,也就是力和位移的点乘。
线积分一般表达形式
平面内有一矢量场(一般是与力有关)
F
=
M
i
+
N
j
=
<
M
,
N
>
\bold F=M\bold i+N\bold j=<M,N>
F=Mi+Nj=<M,N>(省略掉自变量以保证公式的简洁),平面内还有一曲线
C
:
r
(
t
)
=
x
(
t
)
i
+
y
(
t
)
j
=
<
x
(
t
)
,
y
(
t
)
>
C:\bold r(t)=x(t)\bold i+y(t)\bold j=<x(t),y(t)>
C:r(t)=x(t)i+y(t)j=<x(t),y(t)>,其微分形式
d
r
=
<
d
x
,
d
y
>
d\bold r=<dx,dy>
dr=<dx,dy>,由此可以推出线积分的表达形式及其分量表达形式:
∫
C
F
⋅
d
r
=
∫
C
<
M
,
N
>
⋅
<
d
x
,
d
y
>
=
∫
C
M
d
x
+
N
d
y
\int_C\bold F\cdot d\bold r=\int_C<M,N>\cdot <dx,dy>=\int_CMdx+Ndy
∫CF⋅dr=∫C<M,N>⋅<dx,dy>=∫CMdx+Ndy
梯度场与线积分基本定理
前文中提到了梯度场和势函数的关系,这一节将进一步阐明梯度场的性质及如何通过梯度场反推势函数。
什么是梯度场
如果一个向量场满足 F = ∇ f = < f x , f y > \bold F=\nabla f=<f_x,f_y> F=∇f=<fx,fy>或者是 F = − ∇ f \bold F=-\nabla f F=−∇f,那么它就被称为梯度场。注意,物理中一般加负号(比如电场与电势的关系 E = − ∇ V \bold E=-\nabla V E=−∇V),数学中一般不加。
线积分基本定理
∫
C
∇
f
⋅
d
r
=
f
(
P
1
)
−
f
(
P
0
)
\int_C\nabla f\cdot d\bold r=f(P_1)-f(P_0)
∫C∇f⋅dr=f(P1)−f(P0)
其中
P
1
,
P
0
P_1,\ P_0
P1, P0代表一段曲线的终止点和起始点。对该基本定理的简单解释如下:
∫
C
∇
f
⋅
d
r
=
∫
C
f
x
d
x
+
f
y
d
y
=
∫
C
d
f
=
f
(
P
1
)
−
f
(
P
0
)
\int_C\nabla f\cdot d\bold r=\int_Cf_xdx+f_ydy=\int_Cdf=f(P_1)-f(P_0)
∫C∇f⋅dr=∫Cfxdx+fydy=∫Cdf=f(P1)−f(P0)
上式中的
d
f
=
f
x
d
x
+
f
y
d
y
df= f_xdx+f_ydy
df=fxdx+fydy就是势函数
f
f
f的恰微分形式(Exact Differentials)
梯度场的等价性质
现有一梯度场 F = ∇ f = < M , N > \bold F=\nabla f=<M,N> F=∇f=<M,N>,
-
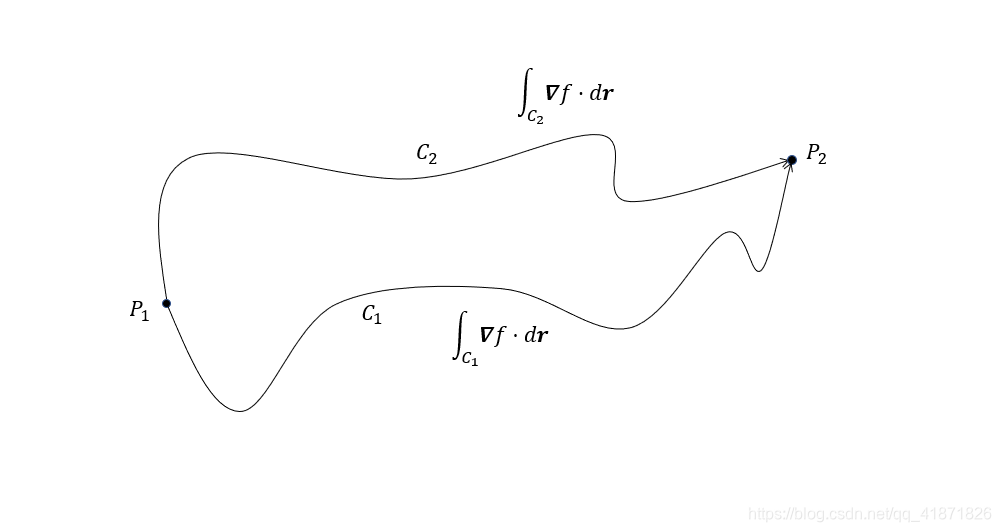
梯度场的线积分与路径无关(Path Independence)
∫ C 1 F ⋅ d r = ∫ C 2 F ⋅ d r \int_{C_1}\bold F\cdot d\bold r=\int_{C_2}\bold F\cdot d\bold r ∫C1F⋅dr=∫C2F⋅dr
下图给出了本条性质的图形解释:
-
梯度场是保守场(Conservative Field):
如果平面内的曲线 C C C是闭合曲线,那么 F F F的线积分为0。
∮ C F ⋅ d r = 0 \oint_C\bold F\cdot d\bold r=0 ∮CF⋅dr=0 -
M d x + N d y Mdx+Ndy Mdx+Ndy是势函数 f f f的恰微分形式
d f = M d x + N d y , where M = f x , N = f y df=Mdx+Ndy,\ \text{where}\ M=f_x,\ N=f_y df=Mdx+Ndy, where M=fx, N=fy
如何检验一平面向量场是梯度场
如果向量场 F = M i + N j = < M , N > \bold F=M\bold i+N\bold j=<M,N> F=Mi+Nj=<M,N>满足 M y = N x M_y=N_x My=Nx,则该向量场为梯度场。
简单证明:
假设
F
=
∇
f
=
<
f
x
,
f
y
>
=
<
M
,
N
>
\bold F =\nabla f=<f_x,f_y>=<M,N>
F=∇f=<fx,fy>=<M,N>,则
f
x
y
=
f
y
x
=
M
y
=
N
x
f_{xy}=f_{yx}=M_y=N_x
fxy=fyx=My=Nx,反之也成立。
由梯度场推导势场
上文详细介绍了梯度场的性质和检验方法,那么已知梯度场如何反向求解势函数呢?
方法1
该方法通过拆解线积分的路径来计算线积分的值。因为梯度场是路径无关的,即线积分等于终止点的值减去起始点的值,所以将线积分的路径拆解成几段好算的路径是可行的,比如将其分解成只沿
x
x
x轴和
y
y
y轴的路径。(该方法并不常用)
方法二
常用的方法是利用反导数求解势函数。用一道例题来解释该方法的细节。
已知一梯度场为
F
=
<
f
x
,
f
y
>
=
<
4
x
2
+
8
x
y
,
3
y
2
+
4
x
2
>
\bold F=<f_x,f_y>=<4x^2+8xy,3y^2+4x^2>
F=<fx,fy>=<4x2+8xy,3y2+4x2>。
步骤:
- 对该梯度场任意分量积分,例如
f
=
∫
f
x
d
x
f=\int f_xdx
f=∫fxdx
f = ∫ f x d x = 4 3 x 3 + 4 x 2 y + g ( y ) f=\int f_xdx=\frac{4}{3}x^3+4x^2y+g(y) f=∫fxdx=34x3+4x2y+g(y)
这里的 g ( y ) g(y) g(y)是之关于变量 y y y的函数。 - 对第一步中得到的含有
g
(
y
)
g(y)
g(y)的函数继续求导,并于原梯度场中的
f
y
f_y
fy联立算出
g
(
y
)
g(y)
g(y),可以得到
f y = 0 + 4 x 2 + g ′ ( y ) = 4 x 2 + 3 y 2 f_y=0+4x^2+g'(y)=4x^2+3y^2 fy=0+4x2+g′(y)=4x2+3y2 g ′ ( y ) = 3 y 2 → g ( y ) = y 3 + C g'(y)=3y^2\quad\to\quad g(y)=y^3+C g′(y)=3y2→g(y)=y3+C - 利用第二步中的结果计算原函数:
f = 4 3 x 3 + 4 x 2 y + y 3 + C f=\frac{4}{3}x^3+4x^2y+y^3+C f=34x3+4x2y+y3+C
B. 格林定理(Green’s Theorem)
尽管矢量场中的功是通过一维积分定义的,但这并不影响其从一维到二维积分的转化。该转化过程需要定义新的量,即旋度(Curl)。功是对向量场与曲线的切线方向积分得到的,如果要让向量场与曲线的法向做积分,就得到了二维通量,转化成二维积分的时候就需要定义新的量——散度(Divergence)
B.1 二维平面中的旋度
因为向量场
F
\bold F
F只是在平面上的,所以其对应的旋度也是二维的。二维平面中旋度的定义为:
Curl
F
=
N
x
−
M
y
\text{Curl}\bold F=N_x-M_y
CurlF=Nx−My
要注意在二维平面中,旋度是一个标量,但在三维空间中,旋度是一个矢量,二维旋度只是三维旋度下沿
z
z
z轴的分量。
B.2 二维平面中的通量与散度
I. 2D 通量
其实功的一维积分表达式还可以写成(平面向量场是
F
=
M
i
+
N
j
\bold F=M\bold i+N\bold j
F=Mi+Nj)
∫
C
F
⋅
d
r
=
∫
C
F
⋅
T
d
s
\int_C \bold F\cdot d\bold r=\int_C \bold F\cdot \bold Tds
∫CF⋅dr=∫CF⋅Tds
其中
T
=
v
∣
v
∣
\bold T=\frac{\bold v}{|\bold v|}
T=∣v∣v是描述曲线切线方向的单位向量,
d
r
=
T
d
s
=
v
d
t
d\bold r=\bold Tds=\bold v dt
dr=Tds=vdt。
如果我们关注的是向量场在曲线法向的分量,我们就可以在功的表达式的基础上定义改进,即
∫
C
F
⋅
n
d
s
\int_C \bold F\cdot \bold nds
∫CF⋅nds接下来只要知道如何表达法向量
n
\bold n
n就可以了。我们以参数
s
s
s来参数化路径向量
r
\bold r
r,也就是
r
(
s
)
=
x
(
t
)
i
+
y
(
t
)
j
\bold r(s)=x(t)\bold i+y(t)\bold j
r(s)=x(t)i+y(t)j,切向向量微元
T
d
s
=
v
d
t
=
<
d
x
,
d
y
>
\bold Tds=\bold vdt=<dx,dy>
Tds=vdt=<dx,dy>,又已知
n
d
s
\bold nds
nds垂直于
T
d
s
\bold Tds
Tds,在二维平面中我们通常将切向向量向右旋转
90
°
90\degree
90°得到曲线的法向量(也就是默认曲线是逆时针方向的),所以
n
d
s
=
<
d
y
,
−
d
x
>
\bold nds=<dy,-dx>
nds=<dy,−dx>以保证
(
n
d
s
)
⋅
(
T
d
s
)
=
0
(\bold nds)\cdot(\bold Tds)=0
(nds)⋅(Tds)=0。新的表达式即二维通量的表达式为:
∫
C
F
⋅
n
d
s
=
∫
C
<
M
,
N
>
⋅
<
d
y
,
−
d
x
>
=
∫
C
M
d
y
−
N
d
x
\int_C \bold F\cdot \bold nds=\int_C <M,N>\cdot<dy,-dx>=\int_C Mdy-Ndx
∫CF⋅nds=∫C<M,N>⋅<dy,−dx>=∫CMdy−Ndx
II. 2D 散度
假设有一向量场
F
=
<
M
,
N
>
\bold F=<M,N>
F=<M,N>,它的散度就表示为:
div
F
=
M
x
+
N
y
=
∂
M
∂
x
+
∂
N
∂
y
\text{div}\bold F=M_x+N_y=\frac{\partial M}{\partial x}+\frac{\partial N}{\partial y}
divF=Mx+Ny=∂x∂M+∂y∂N
B.3 格林定理(Green Theorem)——功(线积分)与旋度
I. 定理内容
给定以向量场
F
=
<
M
,
N
>
\bold F=<M,N>
F=<M,N>,它在某一闭合曲线
C
C
C上(包围的面积为
R
R
R)的线积分为:
∮
C
F
⋅
d
r
=
∮
C
M
d
x
+
N
d
y
=
∬
R
Curl
F
d
A
=
∬
R
(
N
x
−
M
y
)
d
A
\oint_C \bold F \cdot d\bold r=\oint_CMdx+Ndy=\iint_R\text{Curl}\bold FdA=\iint_R(N_x-M_y)dA
∮CF⋅dr=∮CMdx+Ndy=∬RCurlFdA=∬R(Nx−My)dA
其中
N
x
−
M
y
N_x-M_y
Nx−My为向量场的二维旋度。下一章的笔记中会给出三维旋度的统一表达式。一些闭合曲线的示意图如下图:
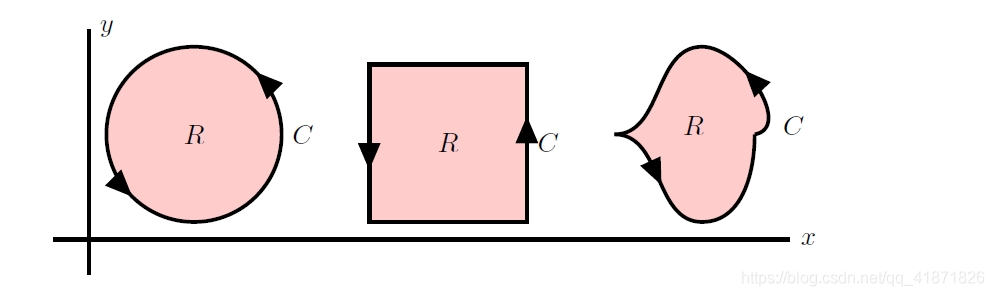
注意闭合曲线的方向一定要满足右手定则(简单来说曲线应该是逆时针转动的)
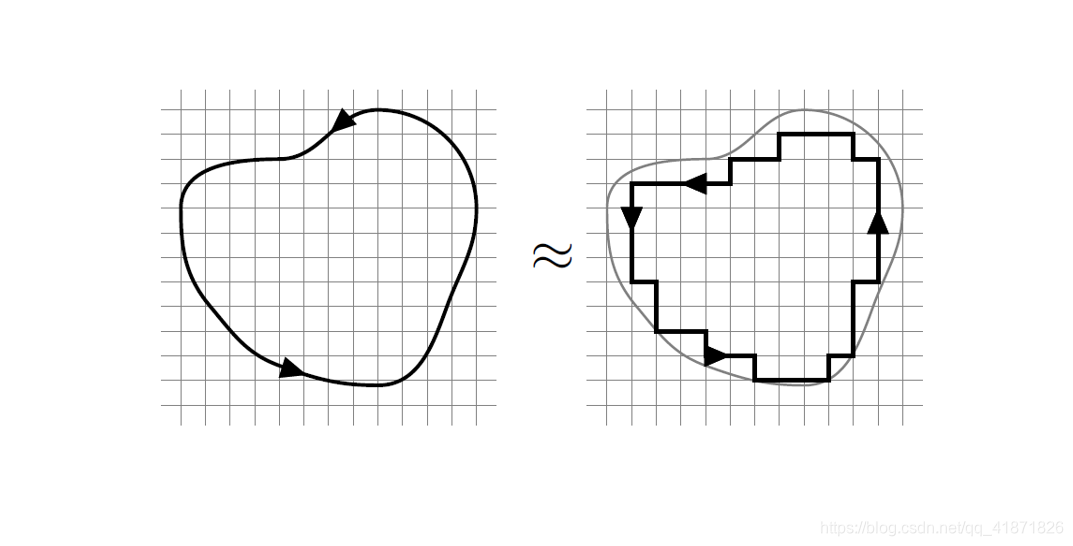
II. 证明思路
证明格林定理的思路是:
- 首先将闭合曲线所构成的平面切割成一个个小矩形(Vertically Simple Region),这种切割方法方便在直角坐标系中的证明;
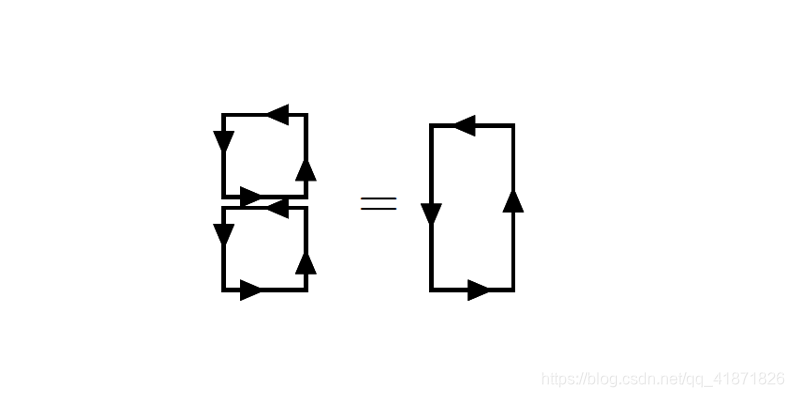
- 由于定理中存在叠加的式子 N x − M y N_x-M_y Nx−My,对于左右两边的式子,可以先证明其中任意一个,比如右边的 ∬ − M y d y d x \iint-M_ydydx ∬−Mydydx和左边的 ∮ M d x \oint Mdx ∮Mdx,之后类推到 N , N x N,N_x N,Nx;
- 最后叠加,在加法中需要注意,两条相邻的闭合曲线相加,其交线会相互抵消,如下图:
III. 旋度的简单物理解释
在流体速度场中,旋度度量的是旋转体的角速度(气体或液体);而在力场中,旋度与旋转物体所受到的力矩(力乘以力臂)有关。
B.4 格林定理法向形式(Green Theorem in normal form)——通量(Flux)与散度
I. 定理内容
与格林定理一样,格林定理法相形式也需要闭合曲线
C
C
C和它所包围的面积
R
R
R及向量场
F
=
<
M
,
N
>
\bold F=<M,N>
F=<M,N>,则通过闭合曲线的通量为:
∮
C
F
⋅
n
d
s
=
∮
C
M
d
y
−
N
d
x
=
∬
R
div
F
d
A
=
∬
R
(
M
x
+
N
y
)
d
A
\oint_C\bold F\cdot\bold nds=\oint_CMdy-Ndx=\iint_R\text{div}\bold F\ dA=\iint_R(M_x+N_y)dA
∮CF⋅nds=∮CMdy−Ndx=∬RdivF dA=∬R(Mx+Ny)dA
值得注意的是,格林定理的法向形式与格林定理本身是一致的,如果令
M
=
N
,
N
=
M
M=N,\ N=M
M=N, N=M,这两个定理是一致的。
II.简单证明
跟证明格林定理的时候思路一样,先把闭合曲线围成的面积切割成一块块小矩形,如下图,
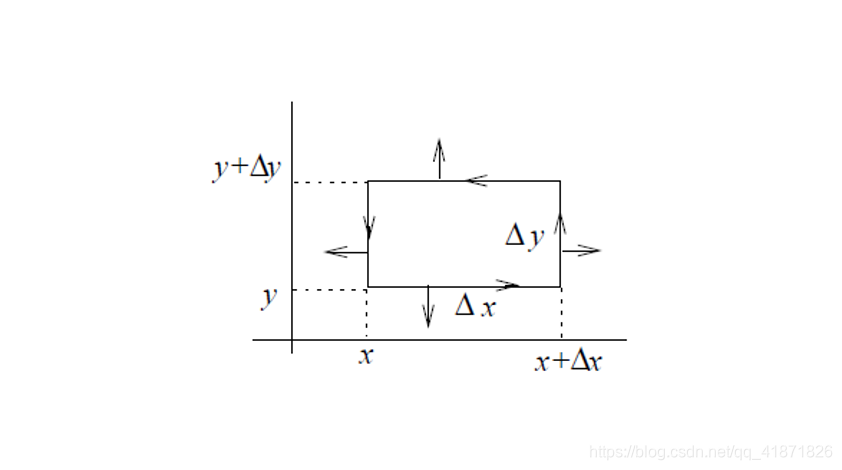
经过顶部曲线的通量是(法向量
n
=
j
\bold n = \bold j
n=j):
F
⋅
j
Δ
s
=
N
(
x
,
y
+
Δ
y
)
Δ
x
\bold F\cdot\bold j\Delta s=N(x,y+\Delta y)\Delta x
F⋅jΔs=N(x,y+Δy)Δx
经过底部曲线的通量是(法向量
n
=
−
j
\bold n = -\bold j
n=−j):
F
⋅
(
−
j
)
Δ
s
=
−
N
(
x
,
y
)
Δ
x
\bold F\cdot(-\bold j)\Delta s=-N(x,y)\Delta x
F⋅(−j)Δs=−N(x,y)Δx
两者相加,
(
N
(
x
,
y
+
Δ
y
)
−
N
(
x
,
y
)
)
Δ
x
=
∂
N
∂
y
Δ
y
Δ
x
(N(x,y+\Delta y)-N(x,y))\Delta x=\frac{\partial N}{\partial y}\Delta y \Delta x
(N(x,y+Δy)−N(x,y))Δx=∂y∂NΔyΔx
左右两边也同理。
III.散度的简单物理解释
如果散度为正,说明该区域内有源(source),也就是发散的;如果散度为负,则说明该区域是汇聚点(sink),是收敛的。物理上,散度描述的是源速率(Source Rate),比如,有一流体,散度表示的就是每单位面积每单位时间加入系统的流体的量。
3.6 二维平面下格林定理总结
二维平面中的格林定理有两种形式,一种是切向,一种是法向。不同的形式有着不同的物理应用。切向形式的格林定理常用于做功;而法向的格林定理常用于计算通量。
单连通区域的描述(Simple Connected)
在上文的关于旋度,散度中,我们的暗含假设是闭合曲线
C
C
C包围的面积
R
R
R是单连通的。单连通区域需要满足以下条件:平面某一区域
D
D
D内,任意闭合曲线所包含的区域都要在该区域
D
D
D内。比如说完整的圆形就是单连通的,而圆环就不属于单连通区域。
格林定理扩展形式(Extended Form)
格林定理可以在非单连通区域内成立,某区域
R
R
R如下如图所示。
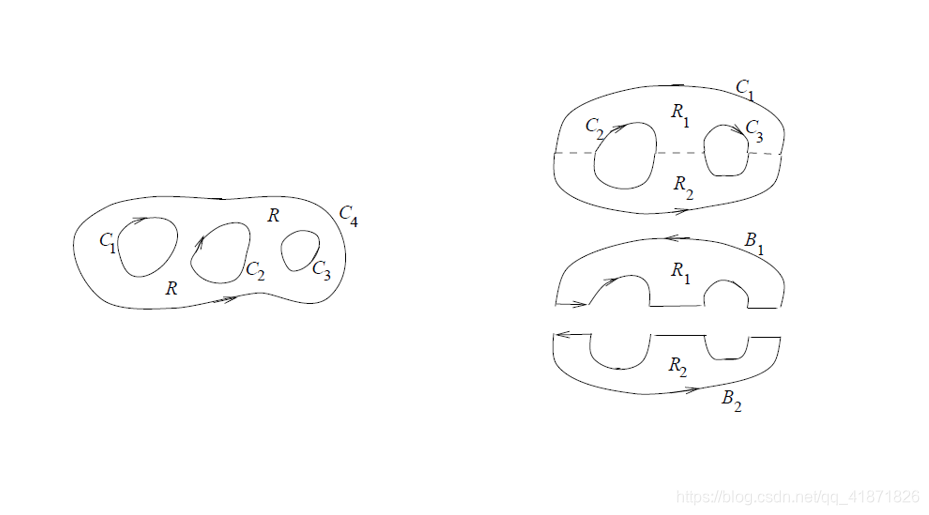
则格林定理则为:
∫
C
1
F
⋅
d
r
+
∫
C
2
F
⋅
d
r
+
⋯
+
∫
C
m
F
⋅
d
r
=
∬
R
curl
F
d
A
\int_{C1}\bold F\cdot d\bold r+\int_{C2}\bold F\cdot d\bold r+\cdots+\int_{Cm}\bold F\cdot d\bold r=\iint_R\text{curl}\bold FdA
∫C1F⋅dr+∫C2F⋅dr+⋯+∫CmF⋅dr=∬RcurlFdA


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









