







 本文详细介绍了4PCS算法,一种用于点云粗配准的RANSAC方法,通过共面四点规则实现粗对齐。重点讨论了关键变种Sper4PCS和优化策略,以及后续的Super4PCS、k-4PCS等扩展应用,包括稠密重建场景的应用实例和代码资源。
本文详细介绍了4PCS算法,一种用于点云粗配准的RANSAC方法,通过共面四点规则实现粗对齐。重点讨论了关键变种Sper4PCS和优化策略,以及后续的Super4PCS、k-4PCS等扩展应用,包括稠密重建场景的应用实例和代码资源。
一、4PCS简介:
4PCS(4 point congruent sets)算法是一种点云粗配准的算法。 适用于重叠区域较小的两帧点云图(深度图)进行粗配准。传统的ICP算法需要两帧点云有较大的重叠区域。
4PCS算法的基本思想,来源于RANSAC算法,从宏观上讲,其基本框架也和RANSAC算法的基本也基本一致。
RANSAC算法是随机选取三个点,按照预先设定**的数学公式或者其他规则,**进行建模,然后判断其他点和该模型的关系,在该模型上的点成为局内点,不在该模型上的点成为局外点,当局内点数量高于一定条件时,我们就可以得到该具体的模型,和在模型上的点。
但是对于实际的点云配准的任务中,是将两个有一定重叠的两幅点云进行检测重叠,现实场景中重复部分的点云不可能都满足数学公式。 所以4PCS在源点云(点云配准时,可以将第一帧成为源点云,第二帧成为目标点云)**利用四个点创造一种特点的规则,然后在目标点云中寻找满足这种规则的点。**如果找对对应点,进行粗配准,计算两帧点云变换的变换矩阵T,计算粗配准后的两幅点云的重合程度,当重合程度足够好的时候,我们认为完成了粗配准。,
所以利用RANSAC算法思路来完成点云配准工作的 最关键的部分是如何利用源点云中的点创造一种有效的规则。 4PCS就是自行创造这种有效的规则。
二、4PCS算法:

4PCS算法中,利用的有效规则是,共面的四个点,两两相连后,会形成一个交点,根据这个交点,我们可以计算出上式的两个比例,当点云发生刚性变换时,这个两个比例关系肯定不会发生变化。当两帧点云配准成功时,在重叠区域中一定会存在类似的四个点。我们按照这个比例相等,同时连线距离相等,这两个规律当成匹配的有效规则。
具体做法:
4PCS算法中, 首先在源点云中随机选择四个共面不共线的四个点。分别连接a,b和成c,d(能形成交点的对角线上的两个点),相交于点e,利用公式 
计算两个比率。
在目标点云中,将所有点两两相连,根据这两个比率,分别在每条连接线上计算可能存在的交点的e1和e2,

若在目标点云中,存在e1和e2在空间中位置是相等的,如图(b)所示中的,q1,q4,q3,q5,同时,q1和q4之间的距离和源点云上的a和c之间的距离相等,q3和q5之间的距离和源点云中的c,d之间的距离相等,我们认为在目标点云中成功找到源点云{a,b,c,d}对应点{q1,q2,q3,q4}

进而将两个点云按照,对应点{a,b,c,d}和{q1,q2,q3,q4}之间的关系进行刚性变换,计算源点云和经过变换矩阵T变换后的目标点云中,最近点距离小于某个阈值的点的数目,该数目用来表征变换矩阵T的质量,然后迭代上面的四个步骤,至到T的质量最佳。此时的T就是两幅点云之间的粗配准的结果。
三、关键变种Sper4PCS的优化方法:
(1)在源点云中选取四个共面但不共线的四个点时,遵循最大距离原则。
根据预估的两幅点云之间的重叠率计算一个最大距离的阈值。 在选择点时,使得点与点之间的距离较大但又不超过某个阈值。 减少不必要的点与点之间的运算。
此时已经选取了四个共面不共线的点{a,b,c,d}
(2)在目标点云中寻找点时,按照球形方式进行点的预匹配。
在目标点云中,首先选择一个点q1,分别以a,b之间的距离r1, c,d之间的距离r2为半径画三维的球,选择在该球上的点作为可能的q2或者q3的点,再分别连接q
1和其他点,在该连接线上分别按照比率来计算e1和e2。
(3)在剔除错误点时,引入连接交线之间的角度,进而提高剔除错误点的速度。

四、其他变种:
4PCS算法能够应对复杂场景的点云配准任务,一系列改进算法应运而生,其中Super4PCS[2]算法采用智能索引策略,将4PCS算法计算复杂度由o(n2)降到o(n),其中n为点的数量,算法可用于大场景点云配准工作;k-4PCS[3]算法针对原始算法中点云大幅度降采样不合理的问题,提出点云关键点检测策略,使用稀疏关键点代替原有算法随机采样点,进而完成点云高精度配准;semantic-keypoint 4PCS[4]算法针对城市建筑场景配准问题,首先分层提取建筑物语义关键点,然后使用语义点替代原始随机采样点进行点云配准;Generalized 4PCS[5]算法针对原始算法共面四点对构建过程进行改进,将共面四点基的构建一般化,不再严格限制四点共处一个平面,该方法极大的提高的点云配准的效率;Super Generalized 4PCS[6]算法是Super 4PCS算法和Generalized 4PCS算法的组合,在智能索引策略的基础上加入非共面优化,减少了一致四点基集合的匹配数量,从而进一步加速算法的运行速度;V4PCS[7]算法在构建共面四点基时加入体积一致理念,将共面四点匹配拓展到非共面四点,减少了算法计算复杂度,进而提高了算法的运算效率;MSSF-4PCS[8]算法在共面四点对匹配时加入法向量约束,减少了四点对匹配数量,从而加速算法运算速度,同时对4PCS算法得到的全等四点对优化,通过计算与匹配全等四点对R半径邻域内的点特征,进一步优化点对匹配结果,提高点云配准精度。2PNS[9]算法对Super4PCS算法进行了改进,仅使用空间两点间的拓扑关系及法向量来构建匹配规则,在无点噪声的场景中算法提速5.2倍,算法同时能够应对更小的重叠度场景配准(最小仅5%重叠度)。
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4-points congruent sets for robust pairwise surface registration. ACM Transactions on Graphics 2008, 27, 1-10.
- Mellado N , Aiger D , Mitra N J . Super 4PCS Fast Global Pointcloud Registration via Smart Indexing[J]. Computer Graphics Forum, 2014, 33(5):205-215.
- Theiler P W , Wegner J D , Schindler K . Markerless point cloud registration with keypoint-based 4-points congruent sets[C]// ISPRS Workshop Laser Scanning 2013. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2013.
- Ge, Xuming. Automatic markerless registration of point clouds with semantic-keypoint-based 4-points congruent sets[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 130:344-357.
- Mohamad M , Rappaport D , Greenspan M . Generalized 4-Points Congruent Sets for 3D Registration[C]// 2014 2nd International Conference on 3D Vision. IEEE, 2015.
- Mohamad M , Ahmed M T , Rappaport D , et al. Super Generalized 4PCS for 3D Registration[C]// 2015 International Conference on 3D Vision (3DV). IEEE Computer Society, 2015.
- Huang J , Kwok T H , Zhou C . V4PCS: Volumetric 4PCS Algorithm for Global Registration[C]// ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. 2017.
- Xu Z , Xu E , Zhang Z , et al. Multiscale Sparse Features Embedded 4-Points Congruent Sets for Global Registration of TLS Point Clouds[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 16(2):286-290.
- C. Raposo and J. P. Barreto, “Using 2 point+normal sets for fast registration of point clouds with small overlap,” 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017.
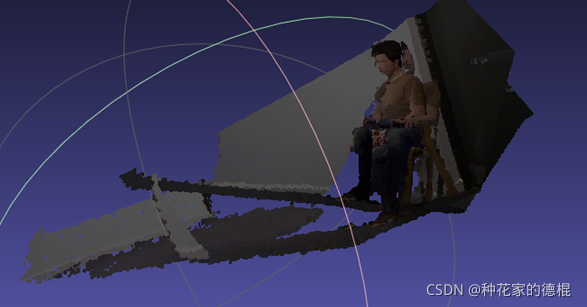
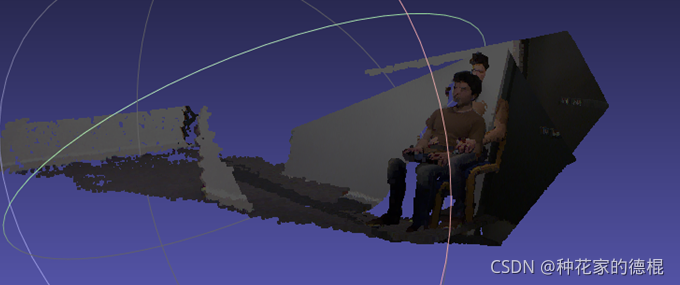
五、Super4PCS在稠密重建场景中的应用尝试
维护Super4PCS代码的地址:
https://github.com/STORM-IRIT/OpenGR
Super4PCS使用时根据输入点云形状密度等不同,需要进行相应参数的调整,调参可以参考:
https://storm-irit.github.io/OpenGR/a00012.html
当输入两帧的RGB-D数据空间位姿差距比较大时,通过设置合适的参数,确实能将这两帧数据进行一个较好的粗对齐,但是对于两帧位姿相邻比较近的点云,很难进行进一步的将两帧点云很好的对齐,还是需要进一步使用ICP等方法进行进一步精准对齐。
相关内容部分参考大佬:
https://blog.csdn.net/peach_blossom/article/details/80955343?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163141914116780265432180%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=163141914116780265432180&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2blogbaidu_landing_v2~default-3-80955343.pc_v2_rank_blog_default&utm_term=4PCS&spm=1018.2226.3001.4450


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









