






目录
5 单应矩阵用于图像视角变换
5.1 应用原理
在射影几何中,单应矩阵更多的被用来表征两个图像平面之间的变换关系。世界坐标系到图像坐标系的变换如下:
在平面上Z=0,并简化上述形式:
在两个相机拍摄同一平面时,有如下的等式:
也就是,存在一组关系,可以实现两个像素平面的互相变换。
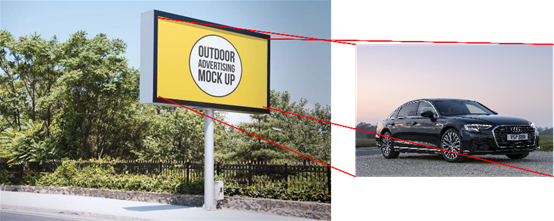
5.2 案例-替换广告牌图像
本案例要实现的效果,将汽车图片贴在广告牌上。
(1)读取汽车图像,用vector存储汽车图像的四个角。
// 读取汽车图片
// 定义vector存储图像的四个角
Mat im_src = imread("../AUdi_A8.jpg");
Size size = im_src.size();
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0,0));
pts_src.push_back(Point2f(size.width - 1, 0));
pts_src.push_back(Point2f(size.width - 1, size.height -1));
pts_src.push_back(Point2f(0, size.height - 1 ));(2)读取广告牌图像,定义结果图像。
// 读取广告牌图像
Mat im_dst = imread("../billboard.jpg");
Mat im_temp = im_dst.clone();
// 定义结果图像
userdata data;
data.im = im_temp;
imshow("Image", im_temp);(3)定义鼠标事件,用于点击广告牌要贴如汽车图片的区域。
// 定义鼠标事件,用于点击广告牌要贴如汽车图片的区域
cout << "从左上角依次顺时针点击要贴入广告牌的区域" << endl;
setMouseCallback("Image", mouseHandler, &data);
waitKey(0);
(4)计算单应矩阵,并将car图片进行透视变换。
// 计算单应矩阵,并将car图片进行透视变换
Mat H = findHomography(pts_src, data.points, 0); //计算单应矩阵
warpPerspective(im_src, data.im, H, data.im.size()); //透视变换
imshow("perspect",data.im);

(5)进行图像填充并显示。
// 进行图像填充
Point pts_dst[4];
for (int i = 0; i < 4; i++)
{
pts_dst[i] = data.points[i];
}
fillConvexPoly(im_dst, pts_dst, 4, Scalar(0), CV_AA);
im_dst = im_dst + data.im;
// 显示结果
imshow("Image", im_dst);
waitKey(0);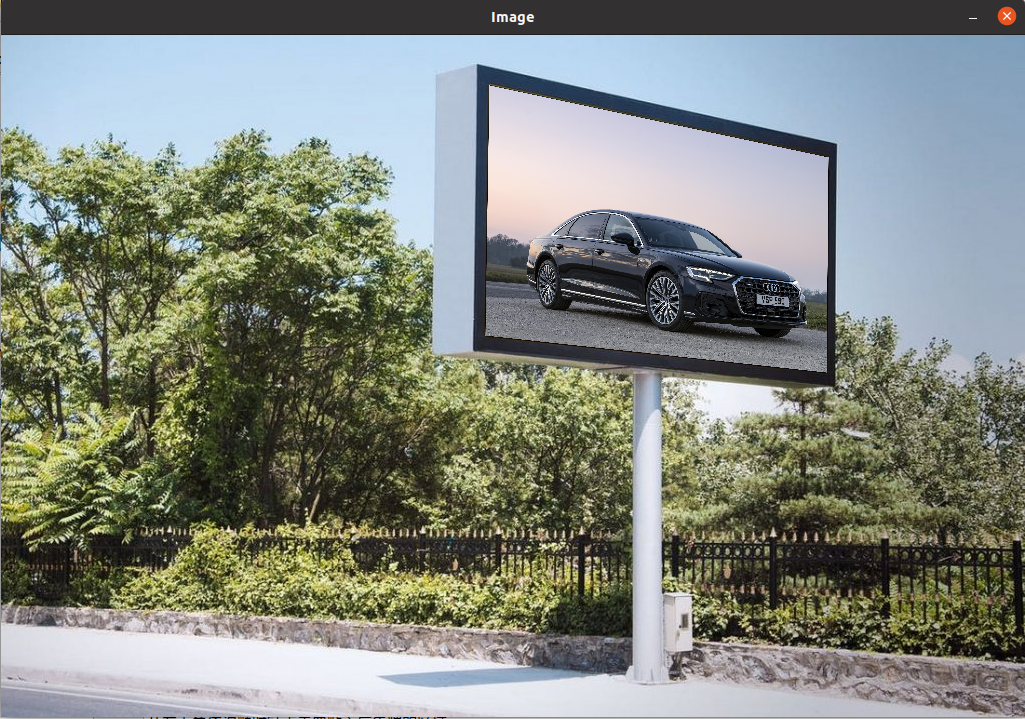
5.3 完整代码
(1)CMakeLists.txt
cmake_minimum_required(VERSION 3.1)
project(opencv_homograph_project)
set(OpenCV_DIR "E:/SDK/opencv/build")
find_package(OpenCV REQUIRED)
add_executable(opencv_homograph_demo virtual-billboard.cpp)
target_link_libraries(opencv_homograph_demo PRIVATE ${OpenCV_LIBS})(2) opencv_homograph_project.cpp
#include <opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc_c.h>
using namespace cv;
using namespace std;
struct userdata{
Mat im;
vector<Point2f> points;
};
void mouseHandler(int event, int x, int y, int flags, void* data_ptr)
{
if ( event == EVENT_LBUTTONDOWN )
{
userdata *data = ((userdata *) data_ptr);
circle(data->im, Point(x,y),3,Scalar(0,255,255), 5, CV_AA);
imshow("Image", data->im);
if (data->points.size() < 4)
{
data->points.push_back(Point2f(x,y));
}
}
}
int main( int argc, char** argv)
{
// 读取汽车图片
// 定义vector存储图像的四个角
Mat im_src = imread("../AUdi_A8.jpg");
Size size = im_src.size();
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0,0));
pts_src.push_back(Point2f(size.width - 1, 0));
pts_src.push_back(Point2f(size.width - 1, size.height -1));
pts_src.push_back(Point2f(0, size.height - 1 ));
// 读取广告牌图像
Mat im_dst = imread("../billboard.jpg");
Mat im_temp = im_dst.clone();
// 定义结果图像
userdata data;
data.im = im_temp;
imshow("Image", im_temp);
// 定义鼠标事件,用于点击广告牌要贴如汽车图片的区域
cout << "从左上角依次顺时针点击要贴入广告牌的区域" << endl;
setMouseCallback("Image", mouseHandler, &data);
waitKey(0);
// 计算单应矩阵,并将car图片进行透视变换
Mat H = findHomography(pts_src, data.points, 0); //计算单应矩阵
warpPerspective(im_src, data.im, H, data.im.size()); //透视变换
imshow("perspect",data.im);
// 进行图像填充
Point pts_dst[4];
for (int i = 0; i < 4; i++)
{
pts_dst[i] = data.points[i];
}
fillConvexPoly(im_dst, pts_dst, 4, Scalar(0), CV_AA);
im_dst = im_dst + data.im;
// 显示结果
imshow("Image", im_dst);
waitKey(0);
return 0;
}


















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











