







 本文详细介绍了星系测光的过程,包括星系位置、面亮度、星等等参数的测量方法。通过望远镜拍摄的图像,使用程序自动探测星系,然后运用阈值算法识别星系。文中提到了多种星系参数,如面亮度、星等和形状参数,并讨论了如何通过等照度线拟合确定星系中心。此外,文章还讨论了Python库photutils在星系测光中的应用。
本文详细介绍了星系测光的过程,包括星系位置、面亮度、星等等参数的测量方法。通过望远镜拍摄的图像,使用程序自动探测星系,然后运用阈值算法识别星系。文中提到了多种星系参数,如面亮度、星等和形状参数,并讨论了如何通过等照度线拟合确定星系中心。此外,文章还讨论了Python库photutils在星系测光中的应用。
在望远镜相机拍摄到星系之后,我们便可以对其开展大量的科学研究。做为星系科学研究的一个重要手段,星系测光便显得尤为重要
星系测光的内容与目的
在星系测光中,我们试图从图像里获得各星系的:
- 本征参数:星系的物理性质。
- 表征参量:星系的几何形态或其他性质。在测量表征参量时,我们即便不知道红移等信息也可以进行。此次学习主要围绕的便是表征测量。
如何从图像中探测到星系
通常,在望远镜拍摄的一幅图像中,会出现不止一个星系。尤其是对于现在的大视场望远镜而言,在每一幅图像中所出现的星系数量,都是我们肉眼所看不过来的。这个时候,就需要用程序来帮助我们去探测这些星系了。
星系探测的大致算法如下:设置一个阈值(例如面亮度、天光背景起伏),在图像中超出阈值的连续像素的数目较多时,则认为这些连续的像素组成一个星系。通常在选取阈值的时候,会让这个值比较地小,以确保连续性。
常用星系参数及测量
星系位置
星系位置的确定方法:
- 将最亮像素的所在位置,作为星系的位置:不适用于形状不规则的星系。
- 求出图像的质心(一阶矩),即对流量取加权平均值。现在一般用的便是这个方法。
面亮度
星系的面亮度 I I I,表示单位立体角接收到的流量,常用单位为 L ⊙ / p c 2 L_\odot/pc^2 L⊙/pc2、 m a g / a r c s e c 2 mag/arcsec^2 mag/arcsec2,这个面亮度与观测的距离无关。
星等
孔径星等
用圆形或椭圆形的孔径,对星系进行流量测量。
自动孔径星等
由二阶矩的测量结果,来决定用于测光的椭率和方位角。
总星等
在孔径测光的孔径足够大时,测得星等趋向的值。
标准星等
定义B波段面亮度为25 m a g / a r c s e c 2 mag/arcsec^2 mag/arcsec2(有时候也用26.5)的等照度线是星系的边缘,用等照度线之内的像素流量积分,计算出来的便是标准星等。
模型星等
用模型拟合星系,从而计算得到的星等。
Petrosian星等
由定义的Petrosian半径进行计算。
形状
对图像求二阶矩,可以得到长轴、短轴以及方位角等信息。
形状参数的应用:
- 根据椭率和方位角,研究星系棒。
- 与物理性质的相关性。
如果求出图像的三阶矩,则可以得到有关图像扭曲的信息。
半光半径
流量达到一半时,所对应的孔径测光半径。
聚度指数
定义为:
C I = m a p e r 1 − m a p e r 2 CI = m_{aper1} - m_{aper2} CI=maper1−maper2
即用小的孔径星等减去大的孔径星等。
利用mag(total) v.s. 聚度指数(例如,mag(3 pixels) - mag(8 pixels)),则可以区分点源和展源。
颜色
星系的颜色为这个星系在不同波段上星等的差。在测量星系颜色时,要求在不同波段用相同孔径进行测光。
形态
星系的形态可以分为早型和晚型:
- 早型(椭圆星系):外观平滑,没有结构特征,颜色偏红,金属丰度高。
- 晚型(漩涡/棒旋星系):颜色较蓝。
- 从早型到晚型的规律:恒星越来越年轻。
非模型分类
中心聚集度
按百分位流量划分的大圈与小圈半径比值,值越大表示中心聚集度越大。早型星系的聚集度更高。
非对称性
原始图像减去旋转180度后的图像。
基尼系数
表征各个像素流量分布的均匀性,早型星系的基尼指数更大,晚型更小。
表面亮度轮廓
对于椭圆星系而言:遵循 R 1 / 4 R^{1/4} R1/4律,更准确地,Sersic law: R 1 / n R^{1/n} R1/n。在观测上,HST高分辨率图像发现并不能用简单的Sersic law描述椭圆星系成分。相应的模型改进:core+sersic.
对于旋涡星系而言:核球成分(与椭圆星系类似)+盘成分。在观测上,HST+2MASS+DSS H band的观测拟合结果,揭示出了中心有star cluster的成分。拟合发现盘星系存在不同的类型。
等照度线
表面亮度相同的等值线,通常可以用椭圆来描述。
由等照度线,可以定义星系大小:
- B波段25 / 26.5 m a g a r c s e c − 2 mag\ arcsec^{-2} mag arcsec−2
- Petrosian R 50 R_{50} R50
- 模型拟合得到的半光度/半质量半径。
星系测光的主要步骤
扣除天光背景
天光背景来源于大气辉光、黄道光、热辐射、月光等一系列现象。
要扣除天光背景,首先就要进行天光背景的计算:
- 一般使用众数(可以通过均值和中位值来估算)。
- 将图像切成网格,计算网格的天光背景,做平滑处理。
- 网格取太小时,会出现过亮的情况,应该用周围网格的中位值替代。
- 网格大小的经验选取方法:10 PSF FWHM.
- 利用星系的外围区域计算(外围区域不受星系影响),取高斯分布的均值。天光背景有起伏。
- 利用天体附近空白的区域,计算平均强度。
- 不能使用常数表示天光背景,应该有一个二维的天光背景图像。
- 划分格子,用中值滤波进行平滑。
- 将空白的区域拟合成一个二维斜面。
背景测量分为全局背景测量和局域背景测量:
- 全局背景测量:同前,盒子的选择,求均值并取平滑。
- 局域背景测量:用于目标源的测光和拟合。
如果大背景没有减好,则还需要对局域背景进行修正。
评估天光背景测量的质量:
- 空白区域强度值应该分布在0附近,并且没有大尺度的空间变化。
扣除周围恒星影响
星系周围的恒星,会污染我们所测量到的流量,因此需要在测光之前就将这些恒星的影响给去除掉。去除的方式为使用mask进行掩膜。
为了扣除明亮的污染源,可以使用中值滤波的方式来进行:对图像做一个中值滤波,构建平滑图像,以去除掉其中的噪声,从而得到一个大背景。
等照度线拟合
第一次等照度线拟合,目的:获取中心的位置。
第二次等照度线拟合,固定中心位置,目的:得到星系盘的性质(倾角、椭率)。
最后,固定所有参数,提取不同半长轴处的亮度曲线,从而计算得到半光半径、聚度等信息。
据此,可以进行棒结构的辨认:椭率和PA会在棒的半径附近有一个转折。但值得注意的是,仅强棒有很明显的特征。
对图像中的星系进行批量测光
前面提到的方法,主要是针对单个星系的情形。通常我们对望远镜拍摄到的图像,是会直接用一个pipeline,来对从里面探测到的星系进行测光的。这样的pipeline,通常会对背景进行一个测量,去除掉明亮污染源的影响,然后设置阈值,并由此在图像中进行源的抓取。
一般情况下阈值设置得会比较小,因此这样一来选出的源会有很多是混在一起的,这个时候就需要进行一个名为“deblending”的操作了。deblending的关键参数DEBLEND_MINCONT,对结果的影响非常大。为了确保漩涡星系不被拆分,在对漩涡星系deblending时,用比较大的值;对密集星系团场而言,用比较小的值,确保小的源能被区分开。
在完成源探测与deblending后,便是对这些星系(或点源)的测光操作。测光的方式有很多种(例如ISO、AUTO、ISOCORR、APERTURE等),用不同的方式测出的结果都有所差异,具体选择哪一种来做为结果,需要看自己的需求。
测光完成后,结合图像的星等零点,便可以得到星系的源表,里面包含了大量的相关星系参数。这样一来,我们便从一幅图像中提取出了大量星系并对其进行了批量测光。
常用星系测光工具:photutils
photutils是Python的一个用于星系测光的模块,可以通过pip install的方式安装。
值得注意的是,photutils在版本更新时,会有部分函数的用法被更改,因此不同版本的用法可能会有所不同。这里使用的photutils的版本为1.8.0,Python版本为3.11.3.
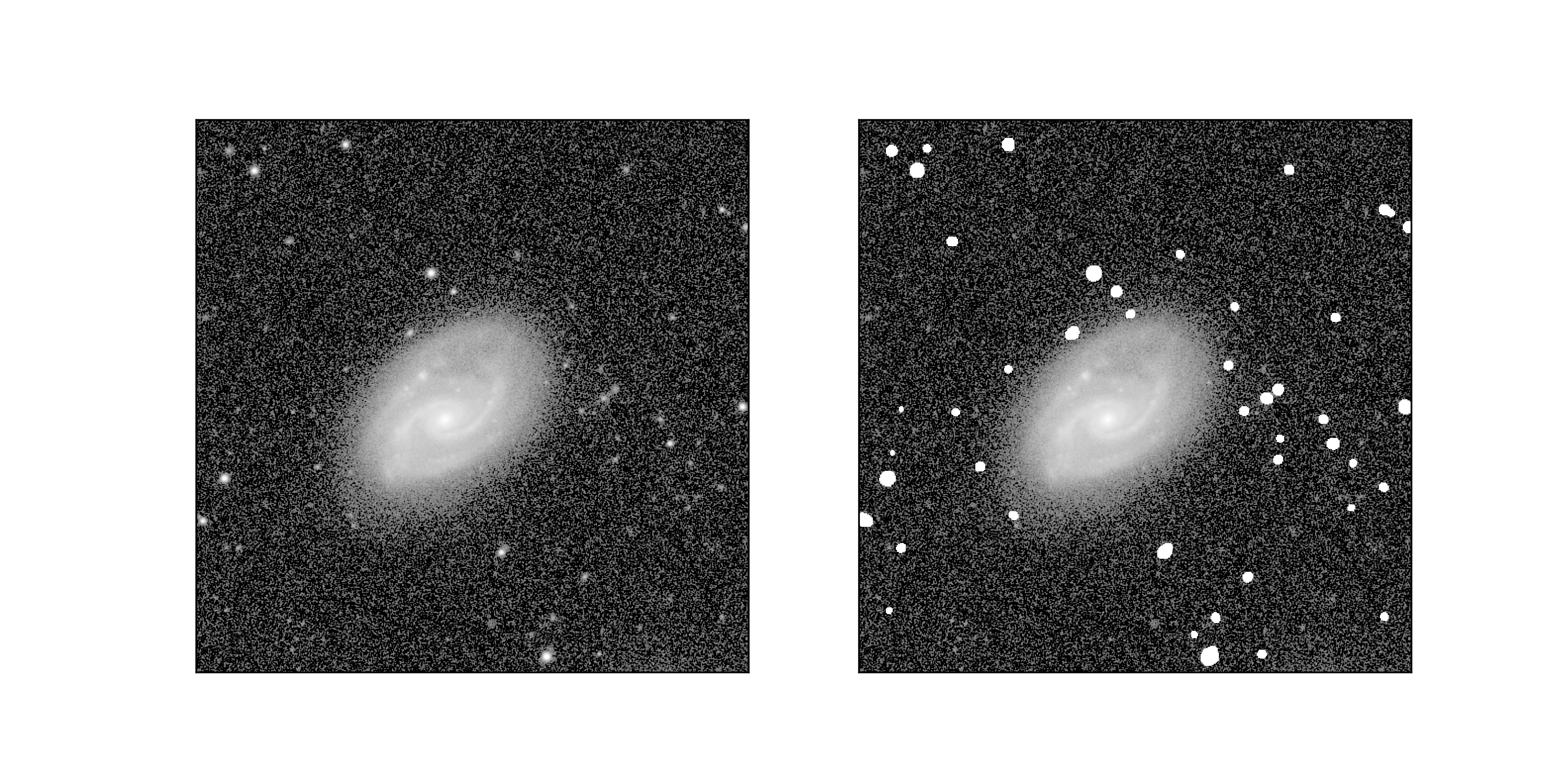
在此案例中,背景已被事先扣除,因此将会从mask的制作开始做起。下图为完成背景扣除后的UGC 9476(i波段)图像:

mask制作——扣除亮源污染
我们可以看到在这幅图像中,除了中心的星系以外,还有非常多的点源散布在图像各处。这些点源的存在会对后续的测光带来一定的影响,因此,我们事先要做的,就是将这些点源给“遮住”,即前面说的mask.
首先打开fits图像文件:
from astropy.io import fits
# 打开图像
path_img = 'UGC9476_i.fits'
img = fits.getdata(path_img)
img = img.byteswap().newbyteorder()
随后,设置一个阈值,在图像中进行源探测,并将探测到的源转换为mask,最后计算得到亮源的标准差:
from astropy.stats import sigma_clipped_stats, SigmaClip
from photutils.segmentation import detect_threshold, detect_sources
# 设置阈值
sigma_clip = SigmaClip(sigma=3.0, maxiters=10)
threshold = detect_threshold(img, nsigma=2.0, sigma_clip=sigma_clip)
# 根据阈值,在图像中进行源探测
segment_img = detect_sources(img, threshold, npixels=3)
# 将探测到的源作成mask
premask = segment_img.make_source_mask(size=5)
# 统计mask的均值、中值与标准差
mean, median, std = sigma_clipped_stats(img, sigma=3.0, mask=premask)
print(mean, median, std)
根据刚才得到的标准差的值,再次对图像进行正式的源探测,并从得到的mask中将星系所对应的那一部分移除掉:
import sep
import copy
# 从图像中找出各源,seg_map_all为各源对应的mask
objects, seg_map_all = sep.extract(img, thresh=2.0, err=std, minarea = 5,
deblend_nthresh=300, deblend_cont=0.1, segmentation_map=True)
# 星系的中心坐标
x0 = 255
y0 = 259
# 将星系所对应的那一块从mask中去除掉
def seg_remove_obj(seg, x, y):
seg_copy = copy.deepcopy(seg)
seg_copy[seg == seg[int(y), int(x)]] = 0 # 移除所有具备与(x,y)一样的值的pixel
return seg_copy
seg_map = seg_remove_obj(seg_map_all, x0, y0)
# 将mask转化为bool类型
seg_map_True = seg_map[:,:] != 0
最后,对得到的mask进行卷积(应该是为了起到一个类似于PSF的作用),并筛选出大于一定阈值的像素,得到最终的mask过后的图像:
from astropy.convolution import Gaussian2DKernel,convolve
import numpy as np
# 对mask进行卷积,并筛选出大于一定阈值的像素
conv = convolve(seg_map_True.astype(int), Gaussian2DKernel(2))
seg_mask = (conv >= 0.1)
mmask = seg_mask.astype(int)
# 最终得到mask过后的图像
img_masked = np.ma.array(img, mask=mmask)
将mask前后的图像展示出来:
from astropy.visualization.mpl_normalize import ImageNormalize
import matplotlib.pyplot as plt
from astropy.visualization import LogStretch
# mask前的图像
plt.figure(figsize=(10, 5))
plt.subplot(121)
norm = ImageNormalize(stretch=LogStretch(a=2000), vmin=0, vmax=6)
plt.imshow(img, origin='lower', cmap='Greys_r', norm=norm)
plt.xticks([])
plt.yticks([])
# mask后的图像
plt.subplot(122)
norm = ImageNormalize(stretch=LogStretch(a=2000), vmin=0, vmax=6)
plt.imshow(img_masked, origin='lower', cmap='Greys_r', norm=norm)
plt.xticks([])
plt.yticks([]);
并将mask保存为fits图像文件:
# 保存mask后的图像
fits.writeto("UGC9476_i_mask.fits", mmask, overwrite=True)
从生成的mask图像中,便可以发现星系周围的亮源基本上都被遮挡了。
第一次等照度线拟合——确定星系中心位置
准备工作
读入科学图像文件:
from astropy.io import fits
path_img = 'UGC9476_i.fits'
# 大致估计的星系中心坐标
ra = 220.383
dec = 44.513
# 读取科学图像文件
hdu = fits.open(path_img)
img = hdu[0].data
head = hdu[0].header
将估算的星系中心坐标,由赤经、赤纬转化为像素坐标:
from astropy.wcs import WCS
# 将pixelSize的单位由degree转为arcsec
pixelSize = abs(head['CD2_2']) * 3600
# 将估计的星系中心坐标,根据header中的wcs信息,转化为像素坐标
wcs = WCS(head)
objXY = wcs.all_world2pix([ra], [dec], 0)
objXp = objXY[0][0]
objYp = objXY[1][0]
posi=[objXp, objYp]
print(posi)
读取mask图像,并对科学图像进行mask操作:
import numpy as np
# 读取mask图像,并对科学图像进行mask操作
path_mask = 'UGC9476_i_mask.fits'
mask = fits.getdata(path_mask)
img_masked = np.ma.array(img, mask=mask)
开始拟合
在拟合前,先设置将要用于拟合的必要初始参数:
# 准备开始第一次等照度线拟合,先进行初始参数的设置
params = {}
# 椭率
params['e0'] = 0.1
# 椭圆的方位角(photutils中的方位角定义是从x轴开始算起的)
params['pa0'] = np.pi / 4
# 椭圆的半长轴尺寸(单位:像素),最好设置成略小于星系的尺寸
params['sma0'] = 90
# 估算的星系中心位置
params['xcen0'] = posi[0]
params['ycen0'] = posi[1]
# 像角元尺寸,即一个pixel对应多大的张角
params['pixscl'] = pixelSize
随后开始进行等照度线的拟合:
import time
from photutils.isophote import EllipseGeometry
from photutils.isophote import Ellipse
time_start = time.time()
geometry = EllipseGeometry(params['xcen0'], params['ycen0'], params['sma0'], params['e0'], params['pa0'])
ellipse = Ellipse(img_masked, geometry)
# 进行等照度线拟合
# 参数含义:不固定中心,不固定方位角,不固定椭率。拟合时,半长轴从1逐步增加到180像素,步长为0.15
iso_free = ellipse.fit_image(fix_center=False, fix_pa=False, fix_eps=False,
minsma=1, maxsma=180, step=0.15, maxgerr=1)
time_end = time.time()
print('totally cost: ',int(time_end-time_start))
在等照度线拟合期间,会使用不同大小的椭圆去拟合亮度轮廓,从而得到各椭圆参数随半长轴大小的变化。将这样的关系画出来:
import matplotlib.pyplot as plt
# 将拟合失败的点去除掉
ig = iso_free.stop_code != 4
# 创建总图像
plt.figure(figsize=(10, 7.5))
plt.subplots_adjust(top=0.92, bottom=0.08, left=0.10, right=0.95, hspace=0.4, wspace=0.35)
# 椭率随半长轴的变化
plt.subplot(321)
plt.errorbar(iso_free.sma[ig]*params['pixscl'], iso_free.eps[ig], yerr=iso_free.ellip_err[ig],
fmt='o', markersize=3, color='black')
plt.xlabel('SMA (arcsec)')
plt.ylabel('Ellipticity')
plt.ylim(0, 0.4)
# 方位角随半长轴的变化
plt.subplot(322)
plt.errorbar(iso_free.sma[ig]*params['pixscl'], iso_free.pa[ig]/np.pi*180.-90, yerr=iso_free.pa_err[ig]/np.pi*180.,
fmt='o', markersize=3, color='black')
plt.xlabel('SMA (arcsec)')
plt.ylabel('PA (deg)')
# 中心x坐标随半长轴的变化
plt.subplot(323)
plt.errorbar(iso_free.sma[ig]*params['pixscl'], iso_free.x0[ig], yerr=iso_free.x0_err[ig], fmt='o',
markersize=3, color='black')
plt.xlabel('SMA (arcsec)')
plt.ylabel('xcen')
# 中心y坐标随半长轴的变化
plt.subplot(324)
plt.errorbar(iso_free.sma[ig]*params['pixscl'], iso_free.y0[ig], yerr=iso_free.y0_err[ig], fmt='o',
markersize=4, color='black')
plt.xlabel('SMA (arcsec)')
plt.ylabel('ycen')
# 面亮度轮廓
plt.subplot(325)
kk = iso_free.intens > 0
mu = -2.5*np.log10(iso_free.intens[kk]/params['pixscl']**2) + 22.5
mu_err = 2.5*iso_free.int_err[kk]/iso_free.intens[kk]/np.log(10)
plt.errorbar(iso_free.sma[kk]*params['pixscl'], mu, yerr=mu_err, color='black', fmt='o', markersize=3)
plt.ylim(30, 16)
plt.ylabel('$\mu$ mag/arcsec$^2$')
plt.xlabel('SMA (arcsec)')
# 生长曲线
plt.subplot(326)
plt.scatter(iso_free.sma*params['pixscl'], iso_free.tflux_e/np.max(iso_free.tflux_e), color='black', marker='.')
plt.ylabel('fraction')
plt.xlabel('SMA (arcsec)')
plt.ylim(0, 1.1)
# 保存图片
plt.savefig('Example/iso_step1.png', bbox_inches='tight')
可以看到下述图像:
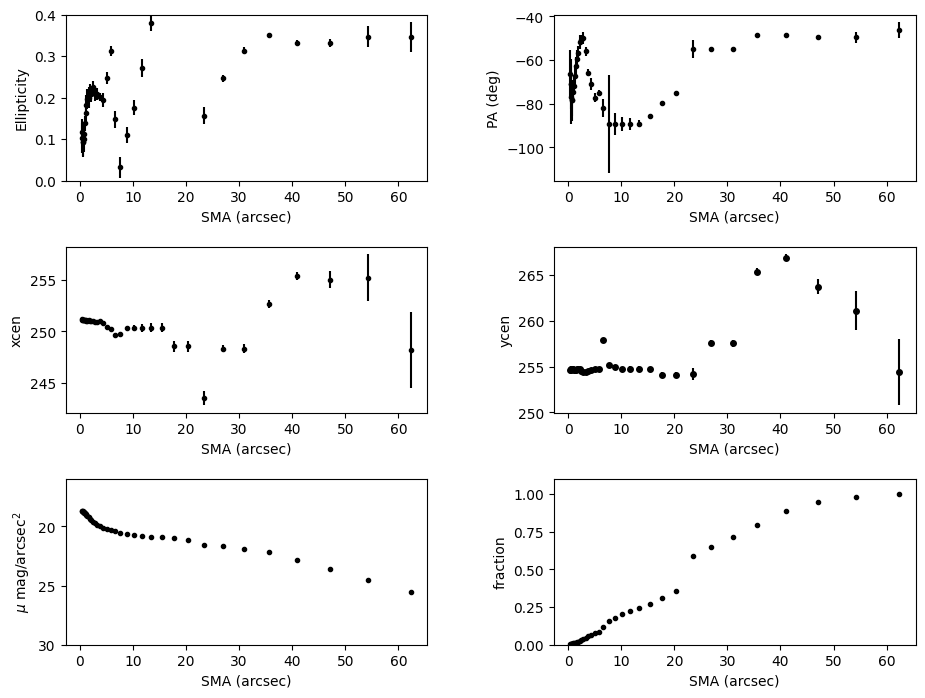
左上:椭率
右上:方位角
左中:x轴中心位置
右中:y轴中心位置
左下:面亮度
右下:生长曲线(该椭圆中包含了占比多少的流量)
可以发现,x、y坐标的中心位置,在半长轴较小的时候并没有发生太大的变化,而随着半长轴的增大,这两个值开始发生了较为剧烈的变化。由于星系在中心的结构相对地还比较对称,因此,对于这两个值,我们可以取中心区域的平均值,作为这个星系的中心。注意到这两个值在SMA < 5的时候还算比较稳定,因此,我们对SMA < 5的区域取平均,从而得到星系中心的位置:
# 找出SMA < 5的index
kk = iso_free.sma*params['pixscl'] < 5
# 对SMA < 5的区域取平均,得到星系中心的像素位置并相应地更新参数
xcen = np.mean(iso_free.x0[kk])
ycen = np.mean(iso_free.y0[kk])
params.update({'xcen':xcen, 'ycen':ycen})
print('The galaxy center: ', xcen, ycen)
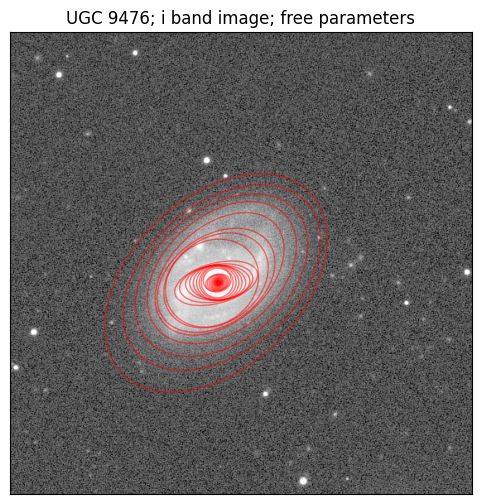
画出第一次等照度线拟合的示意图:
from astropy.visualization.mpl_normalize import ImageNormalize
from astropy.visualization import PercentileInterval,AsinhStretch
import matplotlib.patches as patches
# 新建画布
plt.figure(figsize=(6, 6))
ax1=plt.gca()
# 设置图像归一化与对比度
norm1 = ImageNormalize(img, interval=PercentileInterval(99.7), stretch=AsinhStretch())
# 显示星系图像
plt.imshow(img, origin='lower', cmap='Greys_r', norm=norm1)
plt.xticks([])
plt.yticks([])
plt.title('UGC 9476; i band image; free parameters')
# 画出在各半长轴长度下拟合的等照度线
Niso = len(iso_free.sma)
for k in range(0, Niso):
ellipse = patches.Ellipse((iso_free.x0[k], iso_free.y0[k]), 2*iso_free.sma[k],
(1-iso_free.eps[k])*2*iso_free.sma[k],
angle=iso_free.pa[k]*180/np.pi, alpha=0.5, fill=False, color='r')
ax1.add_artist(ellipse)
# 保存图片
plt.savefig('Example/img_iso_step1.png', bbox_inches='tight')

















 543
543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









