






 当missionplanner更新bootloader失败导致Pixhawk2.4.8变砖时,可以使用STM32CubeProgrammer通过DFU模式恢复。首先需使设备进入DFU状态,对于没有BOOT0-F4接口的国产板子,需短接特定引脚并按住重置按钮进入。下载官方bootloader固件,然后使用编程器进行恢复,重启后设备应能被地面站识别。
当missionplanner更新bootloader失败导致Pixhawk2.4.8变砖时,可以使用STM32CubeProgrammer通过DFU模式恢复。首先需使设备进入DFU状态,对于没有BOOT0-F4接口的国产板子,需短接特定引脚并按住重置按钮进入。下载官方bootloader固件,然后使用编程器进行恢复,重启后设备应能被地面站识别。
起因
在mission planner地面站bootloader update更新失败后,设备无法识别串口号,说白了就是变砖了。尝试了很多办法,也找了售后,说要寄回去维修,这太麻烦了,而且后续我还要继续折腾,变砖的可能性很大。。
看了一些教程,记录以下。
过程
PX4论坛里面有人遇到了相同的问题,这里面给了一个拯救办法,即 使首先使板子进入DFU状态,再使用STM32CubeProgrammer下载bootloader固件。ardupilot官方有详细的教程,链接: Loading Firmware onto boards without existing ArduPilot firmware
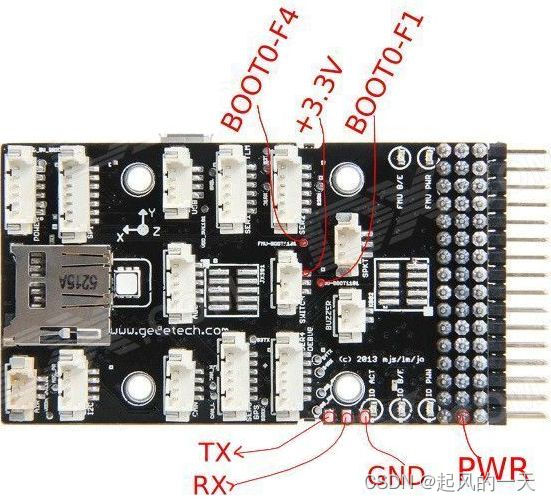
按照前面教程使用ST-LINK-V2连接到板子后,准备进入DFU模式,坑爹的来了,下面图片给了BOOT模式的短接位置,BOOT0-F4,然后发现我买的国产板子并没有这个接口。
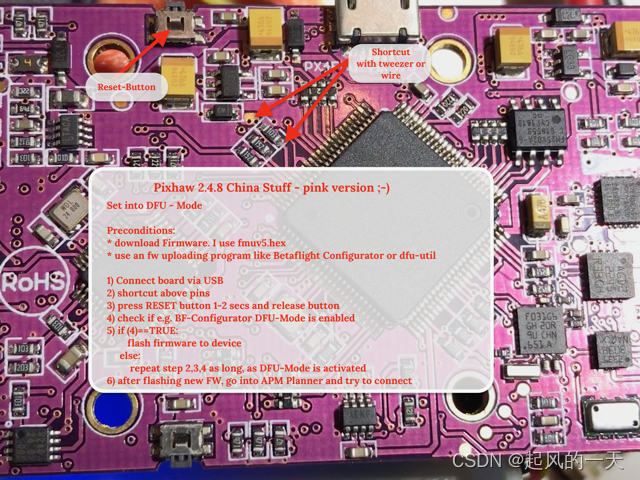
又在国外论坛找了一圈,大部分国产的板子应该按照下图方式进入DFU模式。
1.ST-LINK-V2与FMUV3板子相接
2.使用镊子短接下图箭头的接口,再按住重置按钮1-2s松开,就可以识别到了。
3.下载bootloader固件,链接: bootloader固件下载
4.使用STM32CubeProgrammer将bootloader固件下载到板子里
4.然后重启板子,地面站就能识别到了。
以上只是一个简短的记录,如果完全没接触过可能会有些疑惑,不妨在评论区提出

















 642
642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









