







 本文探讨了三相并网逆变器在离网模式下的工作原理,重点解析了离网控制与并网控制的区别,介绍了基本的拓扑结构和αβ/dq坐标系下的方程。文章详细展示了离网逆变器的控制策略,包括PI控制器的应用,以及在不同坐标系下的方程转换。最后,通过仿真结果展示了PI控制器在跟踪设定值方面的效果,包括SPWM调制信号、输出电压和功率等关键性能指标。
本文探讨了三相并网逆变器在离网模式下的工作原理,重点解析了离网控制与并网控制的区别,介绍了基本的拓扑结构和αβ/dq坐标系下的方程。文章详细展示了离网逆变器的控制策略,包括PI控制器的应用,以及在不同坐标系下的方程转换。最后,通过仿真结果展示了PI控制器在跟踪设定值方面的效果,包括SPWM调制信号、输出电压和功率等关键性能指标。
三相并网逆变器离网PI控制
三相并网逆变器离网控制
逆变器并离网控制基本区别
三相并网逆变器并网状态下,其主要功能是向大电网输送电能。此时系统并网点电压被大电网钳位,因此只需控制逆变器输出满足功率要求的电流,即可实现控制目标,故该状态下并网逆变器一般等效为电流源。
三相并网逆变器离网运行状态下,其主要功能是输出满足负荷运行条件的电压,此时系统输出电流全部由负载自身参数决定。因此该状态下并网逆变器一般等效为电压源。
离网逆变器基本拓扑结构
下图为离网状态下的逆变器拓扑结构,这里用纯电阻代替纯阻性负载:

以逆变器指向负载电流方向为电流参考正方向,即图中 i a i_{a} ia所指方向为正方向。
{
U
a
−
L
d
i
a
d
t
−
i
a
R
−
U
C
a
=
0
U
b
−
L
d
i
b
d
t
−
i
b
R
−
U
C
b
=
0
U
c
−
L
d
i
c
d
t
−
i
c
R
−
U
C
c
=
0
C
d
u
C
a
d
t
=
i
a
−
i
g
a
C
d
u
C
b
d
t
=
i
b
−
i
g
b
C
d
u
C
c
d
t
=
i
c
−
i
g
c
(1)
\left\{ \begin{matrix}{} U_a-L\frac{di_a}{dt}-i_aR-U_{Ca}=0\\ U_b-L\frac{di_b}{dt}-i_bR-U_{Cb}=0\\ U_c-L\frac{di_c}{dt}-i_cR-U_{Cc}=0\\ C\frac{du_{Ca}}{dt}=i_a-i_{ga}\\ C\frac{du_{Cb}}{dt}=i_b-i_{gb}\\ C\frac{du_{Cc}}{dt}=i_c-i_{gc}\\ \end{matrix} \right.\tag{1}
⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧Ua−Ldtdia−iaR−UCa=0Ub−Ldtdib−ibR−UCb=0Uc−Ldtdic−icR−UCc=0CdtduCa=ia−igaCdtduCb=ib−igbCdtduCc=ic−igc(1)
整理可得:
{
d
i
a
d
t
=
1
L
U
a
−
R
L
i
a
−
1
L
U
C
a
d
i
b
d
t
=
1
L
U
b
−
R
L
i
b
−
1
L
U
C
b
d
i
c
d
t
=
1
L
U
c
−
R
L
i
c
−
1
L
U
C
c
d
u
C
a
d
t
=
1
C
i
a
−
1
C
i
g
a
d
u
C
b
d
t
=
1
C
i
b
−
1
C
i
g
b
d
u
C
c
d
t
=
1
C
i
c
−
1
C
i
g
c
(2)
\left\{ \begin{matrix}{} \frac{di_a}{dt}=\frac{1}{L}U_a-\frac{R}{L}i_a-\frac{1}{L}U_{Ca}\\ \frac{di_b}{dt}=\frac{1}{L}U_b-\frac{R}{L}i_b-\frac{1}{L}U_{Cb}\\ \frac{di_c}{dt}=\frac{1}{L}U_c-\frac{R}{L}i_c-\frac{1}{L}U_{Cc}\\ \frac{du_{Ca}}{dt}=\frac{1}{C}i_a-\frac{1}{C}i_{ga}\\ \frac{du_{Cb}}{dt}=\frac{1}{C}i_b-\frac{1}{C}i_{gb}\\ \frac{du_{Cc}}{dt}=\frac{1}{C}i_c-\frac{1}{C}i_{gc}\\ \end{matrix} \right.\tag{2}
⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧dtdia=L1Ua−LRia−L1UCadtdib=L1Ub−LRib−L1UCbdtdic=L1Uc−LRic−L1UCcdtduCa=C1ia−C1igadtduCb=C1ib−C1igbdtduCc=C1ic−C1igc(2)
写成矩阵形式为:
{ [ d i a d t d i b d t d i c d t ] = 1 L [ U a U b U c ] − R L [ i a i b i c ] − 1 L [ U C a U C b U C c ] [ d U C a d t d U C b d t d U C c d t ] = 1 C [ i a i b i c ] − 1 C [ i g a i g b i g c ] (3) \left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]= \frac{1}{L} \left[ \begin{matrix}{} U_a\\ U_b\\ U_c\\ \end{matrix} \right]- \frac{R}{L} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{L} \left[ \begin{matrix}{} U_{Ca}\\ U_{Cb}\\ U_{Cc}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{Ca}}{dt}\\ \frac{dU_{Cb}}{dt}\\ \frac{dU_{Cc}}{dt} \end{matrix} \right]= \frac{1}{C} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{C} \left[ \begin{matrix}{} i_{ga}\\ i_{gb}\\ i_{gc}\\ \end{matrix} \right] \end{matrix} \right.\tag{3} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiadtdibdtdic⎦⎤=L1⎣⎡UaUbUc⎦⎤−LR⎣⎡iaibic⎦⎤−L1⎣⎡UCaUCbUCc⎦⎤⎣⎡dtdUCadtdUCbdtdUCc⎦⎤=C1⎣⎡iaibic⎦⎤−C1⎣⎡igaigbigc⎦⎤(3)
α β \alpha\beta αβ坐标系下逆变器方程
又已知abc-
α
β
\alpha\beta
αβ正逆变换矩阵为:
[
U
α
U
β
U
0
]
=
T
a
b
c
−
α
β
[
U
a
U
b
U
c
]
=
2
3
×
[
1
−
1
2
−
1
2
0
3
2
−
3
2
1
1
1
]
[
U
a
U
b
U
c
]
(4)
\left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ U_0 \end{matrix} \right] = T_{abc-\alpha\beta} \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right] = \frac{2}{3}\times \left[ \begin {matrix} 1 & -\frac{1}{2} & -\frac{1}{2}\\ 0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}\\ 1 & 1 & 1 \end{matrix} \right] \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right]\tag{4}
⎣⎡UαUβU0⎦⎤=Tabc−αβ⎣⎡UaUbUc⎦⎤=32×⎣⎡101−21231−21−231⎦⎤⎣⎡UaUbUc⎦⎤(4)
[ U a U b U c ] = T α β − a b c [ U α U β U 0 ] = [ 1 0 1 2 − 1 2 3 2 1 2 − 1 2 − 3 2 1 2 ] [ U α U β U 0 ] (5) \left[ \begin {matrix}{} U_a\\ U_b\\ U_c \end{matrix} \right]= T_{\alpha\beta-abc} \left[ \begin {matrix} U_{\alpha}\\ U_{\beta}\\ U_0 \end{matrix} \right]= \left[ \begin {matrix} 1 & 0 & \frac{1}{2}\\ -\frac{1}{2} & \frac{\sqrt{3}}{2} & \frac{1}{2}\\ -\frac{1}{2} & -\frac{\sqrt{3}}{2} & \frac{1}{2} \end{matrix} \right] \left[ \begin {matrix} U_{\alpha}\\ U_{\beta}\\ U_0 \end{matrix} \right]\tag{5} ⎣⎡UaUbUc⎦⎤=Tαβ−abc⎣⎡UαUβU0⎦⎤=⎣⎢⎡1−21−21023−23212121⎦⎥⎤⎣⎡UαUβU0⎦⎤(5)
这里补充了0轴是为了使变换矩阵变成方阵,利于求逆,实际上0轴不参与控制运算使用。
对式(3)两边同时乘以
T
a
b
c
−
α
β
T_{abc-\alpha\beta}
Tabc−αβ即可将逆变器方程变换到
α
β
\alpha\beta
αβ坐标系下,可得:
T
a
b
c
−
α
β
[
d
i
a
d
t
d
i
b
d
t
d
i
c
d
t
]
=
1
L
T
a
b
c
−
α
β
[
U
a
U
b
U
c
]
−
R
L
T
a
b
c
−
α
β
[
i
a
i
b
i
c
]
−
1
L
T
a
b
c
−
α
β
[
U
C
a
U
C
b
U
C
c
]
\begin{matrix}{} T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]= \frac{1}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} U_a\\ U_b\\ U_c\\ \end{matrix} \right]- \frac{R}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} U_{Ca}\\ U_{Cb}\\ U_{Cc}\\ \end{matrix} \right]\\ \end{matrix}{}
Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=L1Tabc−αβ⎣⎡UaUbUc⎦⎤−LRTabc−αβ⎣⎡iaibic⎦⎤−L1Tabc−αβ⎣⎡UCaUCbUCc⎦⎤
这里注意只有
[
U
α
U
β
U
0
]
=
T
a
b
c
−
α
β
[
U
a
U
b
U
c
]
\left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ U_0 \end{matrix} \right]= T_{abc-\alpha\beta} \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right]
⎣⎡UαUβU0⎦⎤=Tabc−αβ⎣⎡UaUbUc⎦⎤
因此
T
a
b
c
−
α
β
[
d
i
a
d
t
d
i
b
d
t
d
i
c
d
t
]
T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]
Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤需要进行单独求取,求取过程如下:
[
i
α
i
β
i
0
]
′
=
(
T
a
b
c
−
α
β
[
i
a
i
b
i
c
]
)
′
=
(
T
a
b
c
−
α
β
)
′
[
i
a
i
b
i
c
]
+
(
T
a
b
c
−
α
β
)
[
d
i
a
d
t
d
i
b
d
t
d
i
c
d
t
]
\left[ \begin {matrix}{} i_\alpha\\ i_\beta\\ i_0 \end{matrix} \right]' = (T_{abc-\alpha\beta} \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right])' = (T_{abc-\alpha\beta})' \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right] + (T_{abc-\alpha\beta}) \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]
⎣⎡iαiβi0⎦⎤′=(Tabc−αβ⎣⎡iaibic⎦⎤)′=(Tabc−αβ)′⎣⎡iaibic⎦⎤+(Tabc−αβ)⎣⎡dtdiadtdibdtdic⎦⎤
因此
T
a
b
c
−
α
β
[
d
i
a
d
t
d
i
b
d
t
d
i
c
d
t
]
=
(
T
a
b
c
−
α
β
[
i
a
i
b
i
c
]
)
′
−
(
T
a
b
c
−
α
β
)
′
[
i
a
i
b
i
c
]
T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] = (T_{abc-\alpha\beta} \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right])' - (T_{abc-\alpha\beta})' \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right]
Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=(Tabc−αβ⎣⎡iaibic⎦⎤)′−(Tabc−αβ)′⎣⎡iaibic⎦⎤
而
(
T
a
b
c
−
α
β
)
(T_{abc-\alpha\beta})
(Tabc−αβ)为常数矩阵,因此
(
T
a
b
c
−
α
β
)
′
=
0
(T_{abc-\alpha\beta})'=0
(Tabc−αβ)′=0
所以:
T
a
b
c
−
α
β
[
d
i
a
d
t
d
i
b
d
t
d
i
c
d
t
]
=
[
d
i
α
d
t
d
i
β
d
t
d
i
0
d
t
]
T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] = \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right]
Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=⎣⎡dtdiαdtdiβdtdi0⎦⎤
同理可得:
{
[
d
i
α
d
t
d
i
β
d
t
d
i
0
d
t
]
=
1
L
[
U
α
U
β
U
0
]
−
R
L
[
i
α
i
β
i
0
]
−
1
L
[
U
C
α
U
C
β
U
C
0
]
[
d
U
C
α
d
t
d
U
C
β
d
t
d
U
C
0
d
t
]
=
1
C
[
i
α
i
β
i
0
]
−
1
C
[
i
g
α
i
g
β
i
g
0
]
(6)
\left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta}\\ U_0\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ U_{C0}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{C\alpha}}{dt}\\ \frac{dU_{C\beta}}{dt}\\ \frac{dU_{C0}}{dt} \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{g\alpha}\\ i_{g\beta}\\ i_{g0}\\ \end{matrix} \right] \end{matrix} \right.\tag{6}
⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiαdtdiβdtdi0⎦⎤=L1⎣⎡UαUβU0⎦⎤−LR⎣⎡iαiβi0⎦⎤−L1⎣⎡UCαUCβUC0⎦⎤⎣⎡dtdUCαdtdUCβdtdUC0⎦⎤=C1⎣⎡iαiβi0⎦⎤−C1⎣⎡igαigβig0⎦⎤(6)
dq坐标系下逆变器方程
又已知
α
β
\alpha\beta
αβ-dq正逆变换矩阵为:
[
U
d
U
q
]
=
T
α
β
−
d
q
[
U
α
U
β
]
=
[
c
o
s
φ
s
i
n
φ
−
s
i
n
φ
c
o
s
φ
]
[
U
α
U
β
]
\left[ \begin {matrix}{} U_d\\ U_q\\ \end{matrix} \right] = T_{\alpha\beta-dq} \left[ \begin {matrix} U_\alpha\\ U_\beta\\ \end{matrix} \right] = \left[ \begin {matrix} cos\varphi & sin\varphi \\ -sin\varphi & cos\varphi \end{matrix} \right] \left[ \begin {matrix} U_\alpha\\ U_\beta\\ \end{matrix} \right]
[UdUq]=Tαβ−dq[UαUβ]=[cosφ−sinφsinφcosφ][UαUβ]
[ U α U β ] = T d q − α β U d U q = [ c o s φ − s i n φ s i n φ c o s φ ] [ U d U q ] \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ \end{matrix} \right] = T_{dq-\alpha\beta} \begin {matrix} U_d\\ U_q\\ \end{matrix} = \left[ \begin {matrix} cos\varphi & -sin\varphi \\ sin\varphi & cos\varphi \end{matrix} \right] \left[ \begin {matrix} U_d\\ U_q\\ \end{matrix} \right] [UαUβ]=Tdq−αβUdUq=[cosφsinφ−sinφcosφ][UdUq]
将上述
α
β
\alpha\beta
αβ坐标下逆变器方程去掉0轴方程,并同时乘以变换矩阵
T
α
β
−
d
q
T_{\alpha\beta-dq}
Tαβ−dq可得:
T
α
β
−
d
q
[
d
i
α
d
t
d
i
β
d
t
]
=
1
L
T
α
β
−
d
q
[
U
α
U
β
]
−
R
L
T
α
β
−
d
q
[
i
α
i
β
]
−
1
L
T
α
β
−
d
q
[
U
C
α
U
C
β
]
T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt} \end{matrix} \right] = \frac{1}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta} \end{matrix} \right] - \frac{R}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta} \end{matrix} \right] - \frac{1}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ \end{matrix} \right]\\
Tαβ−dq[dtdiαdtdiβ]=L1Tαβ−dq[UαUβ]−LRTαβ−dq[iαiβ]−L1Tαβ−dq[UCαUCβ]
同上述过程,需要求取
T
α
β
−
d
q
[
d
i
α
d
t
d
i
β
d
t
]
T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\end{matrix} \right]
Tαβ−dq[dtdiαdtdiβ],此时
φ
=
ω
t
\varphi=\omega t
φ=ωt ,
(
T
α
β
−
d
q
)
′
(T_{\alpha\beta-dq})'
(Tαβ−dq)′ 不再为0。
(
T
α
β
−
d
q
)
′
=
[
−
ω
s
i
n
φ
ω
c
o
s
φ
−
ω
c
o
s
φ
−
ω
s
i
n
φ
]
(T_{\alpha\beta-dq})' = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right]
(Tαβ−dq)′=[−ωsinφ−ωcosφωcosφ−ωsinφ]
T α β − d q [ d i α d t d i β d t ] = = [ d i d d t d i q d t ] − [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] [ i α i β ] = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] ( T α β − d q ) − 1 [ i d i q ] = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] ( T α β − d q ) − 1 [ i d i q ] = ω [ 0 1 − 1 0 ] [ i d i q ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt} \end{matrix} \right] == \left[ \begin{matrix}{} \frac{di_{d}}{dt}\\ \frac{di_{q}}{dt} \end{matrix} \right] - \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta} \end{matrix} \right] = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (T_{\alpha\beta-dq})^{-1} \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right]\\ = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (T_{\alpha\beta-dq})^{-1} \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right] = \omega \left[ \begin{matrix}{} 0 & 1 \\ -1 & 0 \end{matrix} \right] \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right] Tαβ−dq[dtdiαdtdiβ]==[dtdiddtdiq]−[−ωsinφ−ωcosφωcosφ−ωsinφ][iαiβ]=[−ωsinφ−ωcosφωcosφ−ωsinφ](Tαβ−dq)−1[idiq]=[−ωsinφ−ωcosφωcosφ−ωsinφ](Tαβ−dq)−1[idiq]=ω[0−110][idiq]
代入系统方程可得dq坐标系下的逆变器方程为:
{
[
d
i
d
d
t
d
i
q
d
t
]
=
1
L
[
U
d
U
q
]
−
R
L
[
i
d
i
q
]
−
1
L
[
U
C
d
U
C
q
]
+
ω
[
i
q
−
i
d
]
[
d
U
C
d
d
t
d
U
C
q
d
t
]
=
1
C
[
i
d
i
q
]
−
1
C
[
i
g
d
i
g
q
]
+
ω
[
U
C
q
−
U
C
d
]
(7)
\left \{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{d}}{dt}\\ \frac{di_{q}}{dt}\\ \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{d}\\ U_{q}\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{d}\\ i_{q}\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{Cd}\\ U_{Cq}\\ \end{matrix} \right] + \omega \left[ \begin{matrix}{} i_{q}\\ -i_{d}\\ \end{matrix} \right] \\ \left[ \begin{matrix}{} \frac{dU_{Cd}}{dt}\\ \frac{dU_{Cq}}{dt}\\ \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{d}\\ i_{q}\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{gd}\\ i_{gq}\\ \end{matrix} \right] +\omega \left[ \begin{matrix}{} U_{Cq}\\ -U_{Cd}\\ \end{matrix} \right] \\ \end{matrix} \right.\tag{7}
⎩⎪⎪⎨⎪⎪⎧[dtdiddtdiq]=L1[UdUq]−LR[idiq]−L1[UCdUCq]+ω[iq−id][dtdUCddtdUCq]=C1[idiq]−C1[igdigq]+ω[UCq−UCd](7)
此时可以发现系统d轴方程存在与q轴耦合的现象,因此需要对系统进行精确控制需要进行dq轴解耦。
对式(7)进行拉普拉斯变换可得:
{
i
d
=
i
g
d
+
s
C
U
C
d
−
ω
C
U
C
q
i
q
=
i
g
q
+
s
C
U
C
q
+
ω
C
U
C
d
U
d
=
(
s
L
+
R
)
i
d
+
U
C
d
−
ω
L
i
q
U
q
=
(
s
L
+
R
)
i
q
+
U
C
q
+
ω
L
i
d
(8)
\left\{ \begin{matrix}{} i_d = i_{gd}+sCU_{Cd}-\omega CU_{Cq}\\ i_q = i_{gq}+sCU_{Cq}+\omega CU_{Cd}\\ U_d = (sL+R)i_{d}+U_{Cd}-\omega Li_{q}\\ U_q = (sL+R)i_{q}+U_{Cq}+\omega Li_{d}\\ \end{matrix} \right.\tag{8}
⎩⎪⎪⎨⎪⎪⎧id=igd+sCUCd−ωCUCqiq=igq+sCUCq+ωCUCdUd=(sL+R)id+UCd−ωLiqUq=(sL+R)iq+UCq+ωLid(8)
用式(8)可以绘制如下框图。

根据逆变器本体模型可以设置双PI控制原理图,因为通过解耦后结合PI控制器即可实现精准控制。

并网逆变器PI控制器定值跟踪
对于PI控制器
G
(
s
)
=
K
P
(
1
+
K
i
s
)
=
K
P
s
+
K
P
K
i
s
G
(
j
ω
)
=
K
P
j
ω
+
K
P
K
i
j
ω
G_{(s)}=K_P(1+\frac{K_i}{s})=\frac{K_Ps+K_PK_i}{s}\\ G(j\omega) = \frac{K_Pj\omega+K_PK_i}{j\omega} \\
G(s)=KP(1+sKi)=sKPs+KPKiG(jω)=jωKPjω+KPKi
因此:
G
(
j
0
)
=
K
P
j
0
+
K
P
K
i
j
0
=
∞
G(j0) = \frac{K_Pj0+K_PK_i}{j0} = \infty \\
G(j0)=j0KPj0+KPKi=∞
此时闭环传函为:
A
=
G
(
j
0
)
1
+
G
(
j
0
)
=
1
A=\frac{G_{(j0)} }{1+G_{(j0)}} = 1
A=1+G(j0)G(j0)=1
所以 PI控制器对频率为0的信号(直流信号)可以实现无静差跟踪!因此在以上过程中需要将逆变器控制模型变换到dq轴,因为dq变换是以PLL输出电压角度进行变换,所以三相电流在dq坐标系下(d轴分量为电流幅值,q轴分量为零)。解耦是为了消除其他轴对PI控制的影响。
仿真结果
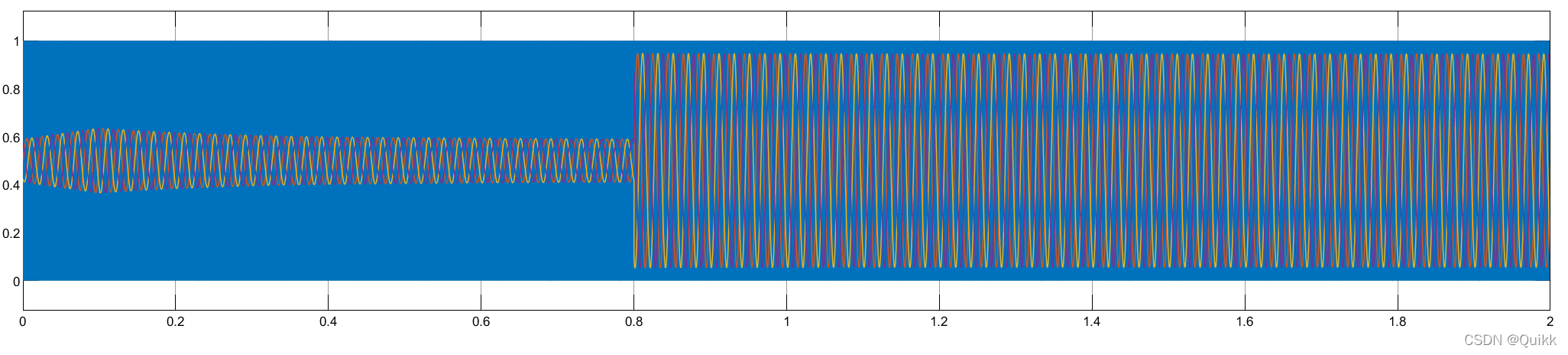
SPWM调制信号:
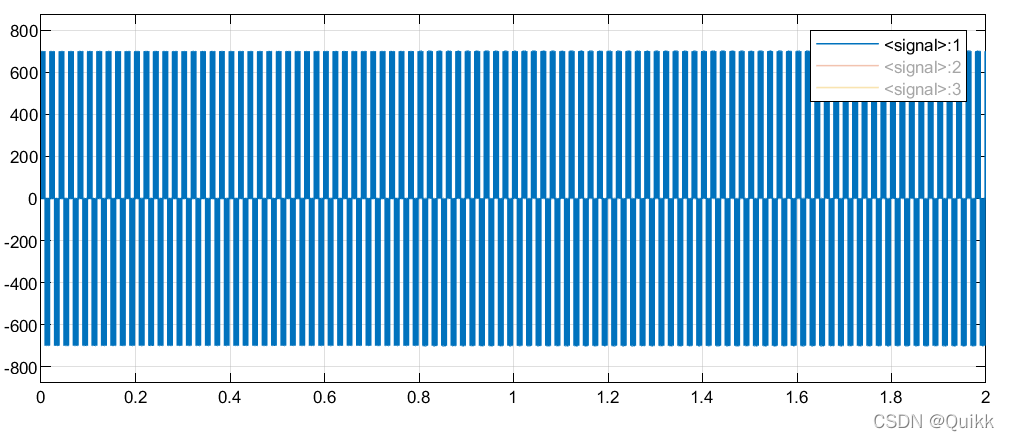
输出线电压(未滤波器前):
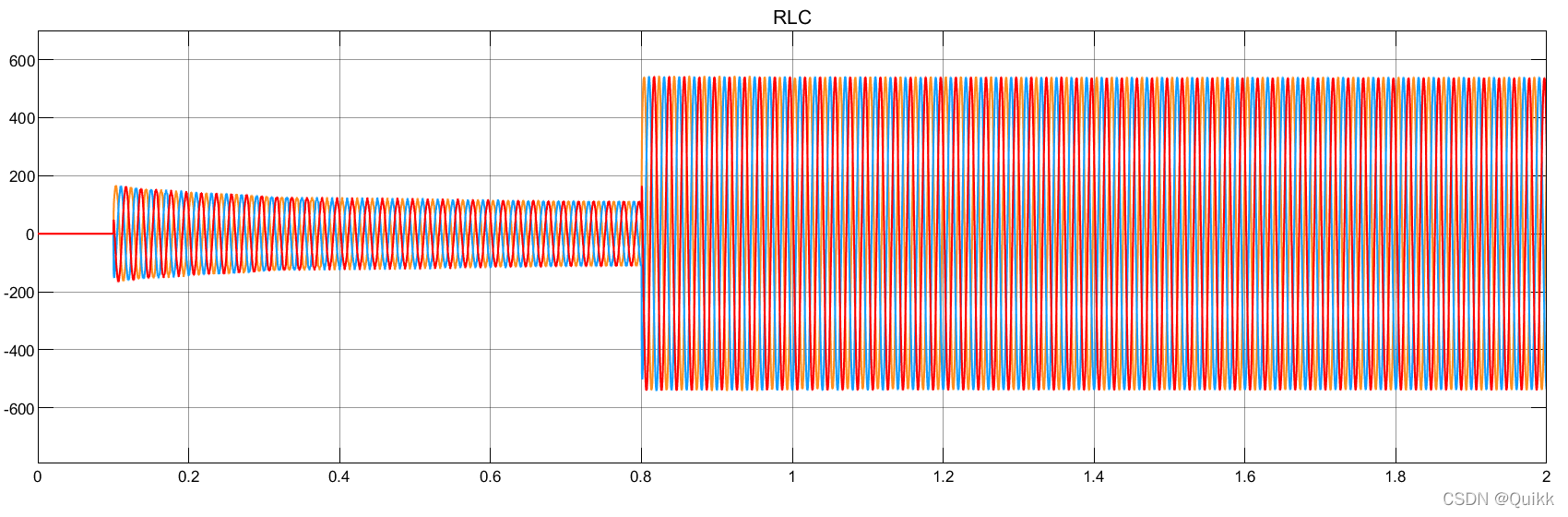
负载侧相电压(0.1s并网,0.8s给定功率阶跃):
输出功率:

仿真模型:模型链接


















 2175
2175

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











