







0 运动学建模

首先建立移动机器人运动学方程:
[
x
˙
y
˙
θ
˙
]
=
[
c
o
s
θ
0
s
i
n
θ
0
0
1
]
[
v
ω
]
\begin{bmatrix} \dot{x} \\ \dot{y} \\ \dot{\theta} \end{bmatrix} =\begin{bmatrix} cos\theta && 0\\ sin\theta && 0\\ 0 && 1 \end{bmatrix} \begin{bmatrix} v\\ \omega \end{bmatrix}
⎣⎡x˙y˙θ˙⎦⎤=⎣⎡cosθsinθ0001⎦⎤[vω]
其中,
P
=
[
x
y
θ
]
P=\begin{bmatrix}x\\ y\\ \theta \end{bmatrix}
P=⎣⎡xyθ⎦⎤为机器人全局坐标系下的位姿,
u
=
[
v
ω
]
u=\begin{bmatrix}v\\ \omega \end{bmatrix}
u=[vω]为机器人的线速度和角速,是系统的控制输入,暂时不把左右轮转速引入。
移动机器人跟踪问题中输入为参考轨迹 P r P_r Pr和参考速度 u r u_r ur。
这里MPC模型的状态量有多种选择:1)全局坐标系位姿;2)全局坐标系误差;3)局部坐标系误差(即全局误差投影到局部坐标系)。下面来一一建模分析。
1 局部误差为状态量
1.1 MPC建模
首先以局部误差为状态量进行分析,对于移动机器人的非完整性,存在以下假设:机器人不发生侧向滑动,即在全局坐标系下
y
˙
L
=
0
\dot{y}_L=0
y˙L=0,即有:
x
˙
s
i
n
θ
−
y
˙
c
o
s
θ
=
0
x
˙
c
o
s
θ
+
y
˙
s
i
n
θ
=
v
\begin{aligned} \dot{x}sin\theta - \dot{y}cos\theta &=0 \\ \dot x cos\theta+\dot ysin\theta &= v \end{aligned}
x˙sinθ−y˙cosθx˙cosθ+y˙sinθ=0=v
此公式对于参考位姿和参考速度依然成立。

定义机器人局部坐标系下位姿误差为:
[
x
e
y
e
θ
e
]
=
[
c
o
s
θ
s
i
n
θ
0
−
s
i
n
θ
c
o
s
θ
0
0
0
1
]
[
x
r
−
x
y
r
−
y
θ
r
−
θ
]
\begin{bmatrix} x_e \\ y_e \\ \theta _e \end{bmatrix} =\begin{bmatrix} cos\theta && sin\theta && 0 \\ -sin\theta && cos\theta && 0\\ 0 && 0 && 1 \end{bmatrix} \begin{bmatrix} x_r-x \\ y_r-y \\ \theta _r-\theta \end{bmatrix}
⎣⎡xeyeθe⎦⎤=⎣⎡cosθ−sinθ0sinθcosθ0001⎦⎤⎣⎡xr−xyr−yθr−θ⎦⎤
则有:
x
˙
e
=
−
ω
s
i
n
θ
(
x
r
−
x
)
+
ω
c
o
s
θ
(
y
r
−
y
)
+
c
o
s
θ
(
x
˙
r
−
x
˙
)
+
s
i
n
θ
(
y
˙
r
−
y
˙
)
=
ω
y
e
−
v
+
x
˙
r
c
o
s
θ
+
y
˙
r
s
i
n
θ
(
由
于
θ
≠
θ
r
,
后
两
项
不
能
合
并
为
v
r
)
=
ω
y
e
−
v
+
x
˙
r
c
o
s
(
θ
r
−
θ
e
)
+
y
˙
r
s
i
n
(
θ
r
−
θ
e
)
=
ω
y
e
−
v
+
x
˙
r
(
c
o
s
θ
r
c
o
s
θ
e
+
s
i
n
θ
r
s
i
n
θ
e
)
+
y
˙
r
(
s
i
n
θ
r
c
o
s
θ
e
−
c
o
s
θ
r
s
i
n
θ
e
)
=
ω
y
e
−
v
+
(
x
˙
r
c
o
s
θ
r
+
y
˙
r
s
i
n
θ
r
)
c
o
s
θ
e
+
(
x
˙
r
s
i
n
θ
r
−
y
˙
r
c
o
s
θ
r
)
s
i
n
θ
e
=
ω
y
e
−
v
+
v
r
c
o
s
θ
e
y
˙
e
=
−
ω
c
o
s
θ
(
x
r
−
x
)
−
ω
s
i
n
θ
(
y
r
−
y
)
−
s
i
n
θ
(
x
˙
r
−
x
˙
)
+
c
o
s
θ
(
y
˙
r
−
y
˙
)
=
−
ω
x
e
−
x
˙
r
s
i
n
θ
+
y
˙
r
c
o
s
θ
=
−
ω
x
e
−
x
˙
r
s
i
n
(
θ
r
−
θ
e
)
+
y
˙
r
c
o
s
(
θ
r
−
θ
e
)
=
−
ω
x
e
−
x
˙
r
(
s
i
n
θ
r
c
o
s
θ
e
−
c
o
s
θ
r
s
i
n
θ
e
)
+
y
˙
r
(
c
o
s
θ
r
c
o
s
θ
e
+
s
i
n
θ
r
s
i
n
θ
e
)
=
−
ω
x
e
+
(
−
x
˙
r
s
i
n
θ
r
+
y
˙
r
c
o
s
θ
r
)
c
o
s
θ
e
+
(
x
˙
r
c
o
s
θ
r
+
y
˙
r
s
i
n
θ
r
)
s
i
n
θ
e
=
−
ω
x
e
+
v
r
s
i
n
θ
e
θ
˙
e
=
θ
˙
r
−
θ
˙
=
ω
r
−
ω
\begin{aligned} \dot x_e &= -\omega sin\theta(x_r-x) +\omega cos\theta(y_r-y)+cos\theta(\dot x_r-\dot x)+sin\theta(\dot y_r -\dot y)\\ &=\omega y_e - v + \dot x_r cos\theta + \dot y_r sin\theta \ (由于\theta\neq \theta _r,后两项不能合并为v_r)\\ &=\omega y_e - v +\dot x_r cos(\theta _r-\theta _e) + \dot y_r sin(\theta _r-\theta _e) \\ &=\omega y_e - v + \dot x_r (cos\theta _r cos\theta _e+sin\theta _r sin\theta _e)+\dot y_r (sin \theta_r cos\theta _e - cos\theta_rsin\theta _e) \\ &=\omega y_e - v +(\dot x_r cos\theta _r+\dot y_r sin \theta_r)cos\theta _e+(\dot x_r sin\theta _r-\dot y_r cos\theta_r)sin\theta _e \\ &=\omega y_e - v + v_rcos\theta_e\\ \dot y_e &= -\omega cos\theta(x_r-x) -\omega sin\theta(y_r-y)-sin\theta(\dot x_r-\dot x)+cos\theta(\dot y_r -\dot y) \\ &= -\omega x_e - \dot x_r sin\theta +\dot y_r cos\theta \\ &= -\omega x_e - \dot x_r sin(\theta _r - \theta _e) + \dot y_rcos(\theta _r - \theta _e) \\ &= -\omega x_e - \dot x_r (sin\theta _r cos\theta _e - cos\theta _r sin\theta _e) + \dot y_r(cos\theta _r cos\theta _e+sin\theta _r sin\theta _e) \\ &= -\omega x_e +(- \dot x_r sin\theta _r + \dot y_rcos\theta _r)cos\theta _e+(\dot x_r cos\theta _r + \dot y_r sin\theta_r)sin\theta_e\\ &=-\omega x_e +v_rsin\theta_e \\ \dot \theta_e &=\dot \theta_r - \dot \theta = \omega_r - \omega \\ \end{aligned}
x˙ey˙eθ˙e=−ωsinθ(xr−x)+ωcosθ(yr−y)+cosθ(x˙r−x˙)+sinθ(y˙r−y˙)=ωye−v+x˙rcosθ+y˙rsinθ (由于θ=θr,后两项不能合并为vr)=ωye−v+x˙rcos(θr−θe)+y˙rsin(θr−θe)=ωye−v+x˙r(cosθrcosθe+sinθrsinθe)+y˙r(sinθrcosθe−cosθrsinθe)=ωye−v+(x˙rcosθr+y˙rsinθr)cosθe+(x˙rsinθr−y˙rcosθr)sinθe=ωye−v+vrcosθe=−ωcosθ(xr−x)−ωsinθ(yr−y)−sinθ(x˙r−x˙)+cosθ(y˙r−y˙)=−ωxe−x˙rsinθ+y˙rcosθ=−ωxe−x˙rsin(θr−θe)+y˙rcos(θr−θe)=−ωxe−x˙r(sinθrcosθe−cosθrsinθe)+y˙r(cosθrcosθe+sinθrsinθe)=−ωxe+(−x˙rsinθr+y˙rcosθr)cosθe+(x˙rcosθr+y˙rsinθr)sinθe=−ωxe+vrsinθe=θ˙r−θ˙=ωr−ω
写成矩阵形式为:
[
x
˙
e
y
˙
e
θ
˙
e
]
=
[
ω
y
e
−
v
+
v
r
c
o
s
θ
e
−
ω
x
e
+
v
r
s
i
n
θ
e
ω
r
−
ω
]
(1)
\begin{aligned} \begin{bmatrix} \dot x_e \\ \dot y_e \\ \dot \theta_e \end{bmatrix} = \begin{bmatrix} \omega y_e - v + v_rcos\theta_e\\ -\omega x_e +v_rsin\theta_e \\ \omega_r - \omega \end{bmatrix} \end{aligned}\tag{1}
⎣⎡x˙ey˙eθ˙e⎦⎤=⎣⎡ωye−v+vrcosθe−ωxe+vrsinθeωr−ω⎦⎤(1)
很明显上式是一个非线性系统,需要进行线性化:
[
x
˙
e
y
˙
e
θ
˙
e
]
=
[
0
ω
0
−
ω
0
0
0
0
0
]
[
x
e
y
e
θ
e
]
+
[
−
v
+
v
r
c
o
s
θ
e
v
r
s
i
n
θ
e
ω
r
−
ω
]
\begin{aligned} \begin{bmatrix} \dot x_e \\ \dot y_e \\ \dot \theta_e \end{bmatrix} = \begin{bmatrix}0 && \omega && 0 \\ -\omega && 0 && 0 \\ 0 && 0 && 0 \end{bmatrix} \begin{bmatrix} x_e \\ y_e \\ \theta_e \end{bmatrix}+ \begin{bmatrix}-v+v_rcos\theta_e \\ v_r sin\theta_e\\ \omega_r - \omega \end{bmatrix} \end{aligned}
⎣⎡x˙ey˙eθ˙e⎦⎤=⎣⎡0−ω0ω00000⎦⎤⎣⎡xeyeθe⎦⎤+⎣⎡−v+vrcosθevrsinθeωr−ω⎦⎤
由于
lim
θ
e
→
0
c
o
s
θ
e
=
1
,
lim
θ
e
→
0
s
i
n
θ
e
=
θ
e
\displaystyle\lim_{\theta_e \to 0}cos\theta_e=1,\ \lim_{\theta_e \to 0}sin\theta_e=\theta_e
θe→0limcosθe=1, θe→0limsinθe=θe,上式可写成:
[
x
˙
e
y
˙
e
θ
˙
e
]
=
[
0
ω
0
−
ω
0
v
r
0
0
0
]
[
x
e
y
e
θ
e
]
+
[
v
r
−
v
0
ω
r
−
ω
]
=
[
0
ω
0
−
ω
0
v
r
0
0
0
]
[
x
e
y
e
θ
e
]
+
[
1
0
0
0
0
1
]
[
v
r
−
v
ω
r
−
ω
]
\begin{aligned} \begin{bmatrix} \dot x_e \\ \dot y_e \\ \dot \theta_e \end{bmatrix} &= \begin{bmatrix}0 && \omega && 0 \\ -\omega && 0 && v_r \\ 0 && 0 && 0 \end{bmatrix} \begin{bmatrix} x_e \\ y_e \\ \theta_e \end{bmatrix}+ \begin{bmatrix}v_r-v\\ 0\\ \omega_r - \omega \end{bmatrix}\\ &=\begin{bmatrix}0 && \omega && 0 \\ -\omega && 0 && v_r \\ 0 && 0 && 0 \end{bmatrix} \begin{bmatrix} x_e \\ y_e \\ \theta_e \end{bmatrix}+ \begin{bmatrix}1 && 0 \\ 0 && 0\\ 0 && 1 \end{bmatrix} \begin{bmatrix}v_r-v \\ \omega_r - \omega \end{bmatrix} \end{aligned}
⎣⎡x˙ey˙eθ˙e⎦⎤=⎣⎡0−ω0ω000vr0⎦⎤⎣⎡xeyeθe⎦⎤+⎣⎡vr−v0ωr−ω⎦⎤=⎣⎡0−ω0ω000vr0⎦⎤⎣⎡xeyeθe⎦⎤+⎣⎡100001⎦⎤[vr−vωr−ω]
此时定义MPC系统状态量为 X = [ x e y e θ e ] X=\begin{bmatrix}x_e \\y_e \\\theta_e\end{bmatrix} X=⎣⎡xeyeθe⎦⎤,控制量为 u ~ = [ v r − v ω r − ω ] \widetilde u=\begin{bmatrix}v_r-v \\ \omega_r - \omega\end{bmatrix} u =[vr−vωr−ω], u ~ = u r − u \widetilde u=u_r-u u =ur−u。
令
A
=
[
0
ω
0
−
ω
0
v
r
0
0
0
]
,
B
=
[
1
0
0
0
0
1
]
A=\begin{bmatrix}0 && \omega && 0 \\ -\omega && 0 && v_r \\ 0 && 0 && 0\end{bmatrix},\ B=\begin{bmatrix}1 && 0 \\0 && 0\\0 && 1\end{bmatrix}
A=⎣⎡0−ω0ω000vr0⎦⎤, B=⎣⎡100001⎦⎤,则有:
X
˙
=
A
X
+
B
u
~
\dot X=AX+B\widetilde u
X˙=AX+Bu
离散化:
X
(
k
+
1
)
−
X
(
k
)
Δ
T
=
A
X
(
k
)
+
B
u
~
(
k
)
\begin{aligned} \frac{X(k+1)-X(k)}{\Delta T}=AX(k)+B\widetilde u(k) \end{aligned}
ΔTX(k+1)−X(k)=AX(k)+Bu
(k)
其中
Δ
T
\Delta T
ΔT为离散时间间隔,即:
X
(
k
+
1
)
=
(
I
+
Δ
T
)
A
X
(
k
)
+
Δ
T
B
u
~
(
k
)
\begin{aligned} X(k+1)=(I+\Delta T)AX(k)+\Delta TB\widetilde u(k) \end{aligned}
X(k+1)=(I+ΔT)AX(k)+ΔTBu
(k)
令
A
~
=
(
I
+
Δ
T
)
A
,
B
~
=
Δ
T
B
\widetilde A=(I+\Delta T)A,\ \widetilde B=\Delta TB
A
=(I+ΔT)A, B
=ΔTB,同时设定预测时域为
N
N
N,则有:
X
(
k
+
1
)
=
A
~
X
(
k
)
+
B
~
u
~
(
k
)
X
(
k
+
2
)
=
A
~
X
(
k
+
1
)
+
B
~
u
~
(
k
+
1
)
=
A
~
2
X
(
k
)
+
A
~
B
~
u
~
(
k
)
+
B
~
u
~
(
k
+
1
)
X
(
k
+
3
)
=
A
~
3
X
(
k
)
+
A
~
2
B
~
u
~
(
k
)
+
A
~
B
~
u
~
(
k
+
1
)
+
B
~
u
~
(
k
+
2
)
.
.
.
X
(
k
+
N
)
=
A
~
N
X
(
k
)
+
∑
i
=
0
N
−
1
A
~
N
−
i
−
1
B
~
u
~
(
k
+
i
)
\begin{aligned} X(k+1)&=\widetilde AX(k)+\widetilde B\widetilde u(k)\\ X(k+2)&=\widetilde AX(k+1)+\widetilde B\widetilde u(k+1)=\widetilde A^2X(k)+\widetilde A\widetilde B\widetilde u(k)+\widetilde B\widetilde u(k+1)\\ X(k+3)&=\widetilde A^3X(k)+\widetilde A^2\widetilde B\widetilde u(k)+\widetilde A\widetilde B\widetilde u(k+1)+\widetilde B\widetilde u(k+2)\\ ... \\ X(k+N)&=\widetilde A^NX(k)+\sum _{i=0}^{N-1} \widetilde A^{N-i-1} \widetilde B\widetilde u(k+i) \end{aligned}
X(k+1)X(k+2)X(k+3)...X(k+N)=A
X(k)+B
u
(k)=A
X(k+1)+B
u
(k+1)=A
2X(k)+A
B
u
(k)+B
u
(k+1)=A
3X(k)+A
2B
u
(k)+A
B
u
(k+1)+B
u
(k+2)=A
NX(k)+i=0∑N−1A
N−i−1B
u
(k+i)
这里其实做了简化,根据
A
A
A的表达式,
A
~
(
k
)
\widetilde A(k)
A
(k)和
A
~
(
k
+
1
)
\widetilde A(k+1)
A
(k+1)不完全等价。
令:
Y
(
k
)
=
[
X
(
k
+
1
)
X
(
k
+
2
)
.
.
.
X
(
k
+
N
)
]
,
Ψ
=
[
A
~
A
~
2
.
.
.
A
~
N
]
,
Δ
U
=
[
u
~
(
k
)
u
~
(
k
+
1
)
.
.
.
u
~
(
k
+
N
−
1
)
]
Θ
=
[
B
~
0
.
.
.
0
A
~
B
~
B
~
.
.
.
0
.
.
.
A
~
N
−
1
B
~
A
~
N
−
2
B
~
.
.
.
B
~
]
Y(k)=\begin{bmatrix}X(k+1)\\ X(k+2)\\ ...\\X(k+N)\end{bmatrix}, \Psi=\begin{bmatrix}\widetilde A\\ \widetilde A^2\\ ...\\\widetilde A^N\end{bmatrix}, \Delta U=\begin{bmatrix}\widetilde u(k)\\ \widetilde u(k+1)\\ ...\\\widetilde u(k+N-1)\end{bmatrix}\\ \Theta = \begin{bmatrix} \widetilde B && 0 && ... && 0 \\ \widetilde A\widetilde B && \widetilde B && ... && 0 \\ ...\\ \widetilde A^{N-1}\widetilde B && \widetilde A^{N-2}\widetilde B && ... && \widetilde B \end{bmatrix}
Y(k)=⎣⎢⎢⎡X(k+1)X(k+2)...X(k+N)⎦⎥⎥⎤,Ψ=⎣⎢⎢⎡A
A
2...A
N⎦⎥⎥⎤,ΔU=⎣⎢⎢⎡u
(k)u
(k+1)...u
(k+N−1)⎦⎥⎥⎤Θ=⎣⎢⎢⎡B
A
B
...A
N−1B
0B
A
N−2B
.........00B
⎦⎥⎥⎤
则有:
Y
(
k
)
=
Ψ
X
(
k
)
+
Θ
Δ
U
Y(k)=\Psi X(k) + \Theta \Delta U
Y(k)=ΨX(k)+ΘΔU
其中
Y
(
k
)
Y(k)
Y(k)为
k
k
k时刻预测时域内的误差,定义代价函数:
J
=
Y
T
(
k
)
Q
Y
(
k
)
+
Δ
U
T
R
Δ
U
\begin{aligned} J&=Y^T(k)QY(k)+\Delta U^TR\Delta U \end{aligned}
J=YT(k)QY(k)+ΔUTRΔU
其中
Q
Q
Q和
R
R
R为权重。该代价函数可以使预测时域内误差最小,且对控制量也有一定约束。对
J
J
J作展开:
J
=
(
Ψ
X
(
k
)
+
Θ
Δ
U
)
T
Q
(
Ψ
X
(
k
)
+
Θ
Δ
U
)
+
Δ
U
T
R
Δ
U
=
X
T
(
k
)
Ψ
T
Q
Ψ
X
(
k
)
+
2
X
T
(
k
)
Ψ
T
Q
Θ
Δ
U
+
Δ
U
T
Θ
T
Q
Θ
Δ
U
+
Δ
U
T
R
Δ
U
=
Δ
U
T
(
Θ
T
Q
Θ
+
R
)
Δ
U
+
2
X
T
(
k
)
Ψ
T
Q
Θ
Δ
U
+
X
T
(
k
)
Ψ
T
Q
Ψ
X
(
k
)
\begin{aligned} J &= (\Psi X(k) + \Theta \Delta U)^TQ(\Psi X(k) + \Theta \Delta U)+\Delta U^TR\Delta U\\ &= X^T(k)\Psi ^T Q \Psi X(k) + 2X^T(k)\Psi ^TQ\Theta \Delta U + \Delta U^T \Theta ^TQ\Theta \Delta U + \Delta U^TR\Delta U\\ &= \Delta U^T(\Theta ^TQ\Theta+R)\Delta U + 2X^T(k)\Psi ^TQ\Theta \Delta U + X^T(k)\Psi ^T Q \Psi X(k) \end{aligned}
J=(ΨX(k)+ΘΔU)TQ(ΨX(k)+ΘΔU)+ΔUTRΔU=XT(k)ΨTQΨX(k)+2XT(k)ΨTQΘΔU+ΔUTΘTQΘΔU+ΔUTRΔU=ΔUT(ΘTQΘ+R)ΔU+2XT(k)ΨTQΘΔU+XT(k)ΨTQΨX(k)
由于在
k
k
k时刻,
X
(
k
)
,
Ψ
,
Θ
X(k),\ \Psi,\ \Theta
X(k), Ψ, Θ均为确定值,所以上式即为关于
Δ
U
\Delta U
ΔU的二次型。
令
H
=
2
(
Θ
T
Q
Θ
+
R
)
,
f
T
=
2
X
T
(
k
)
Ψ
T
Q
Θ
H=2(\Theta ^TQ\Theta+R),\ f^T=2X^T(k)\Psi ^TQ\Theta
H=2(ΘTQΘ+R), fT=2XT(k)ΨTQΘ
即可利用MATLAB中quadprog函数求解。
在得到
Δ
U
∗
\Delta U^*
ΔU∗后,取其中第一个元素
u
~
∗
(
k
)
\widetilde u^*(k)
u
∗(k)作为
k
k
k时刻的MPC系统控制量,则实际速度控制量为:
u
∗
(
k
)
=
u
r
(
k
)
−
u
~
∗
(
k
)
u^*(k)=u_r(k)-\widetilde u^*(k)
u∗(k)=ur(k)−u
∗(k)
1.2 仿真实现参考代码
clear;clc;
close all;
%% 仿真参数设定
dt = 0.01; % 离散时间间隔
num_step = 2000; % 仿真步数
t = (0:num_step-1)*dt; % 生成仿真时间序列
%% 运动学参数设定(本实例给定参考速度)
u_r = [1;0.5]*ones(1,num_step); % 参考速度(圆轨迹)
% u_r = [3;0]*ones(1,num_step); % 参考速度(直线轨迹)
% 利用积分法生成参考轨迹
P_r = zeros(3,num_step);
for k = 2:num_step
last_theta = P_r(3,k-1);
P_r(:,k) = P_r(:,k-1)+[cos(last_theta),0;sin(last_theta),0;0,1]*u_r(:,k-1)*dt;
end
% 设定初始位置和初始速度
P = [1;-1;0]; % 初始位置
u = [0;0]; % 初始速度
X = zeros(3,num_step); % 存储误差向量
%% MPC控制器参数设定
N = 10; % 预测时序长度
Q = 5*diag([4,10,0.1]); % 状态量权重
R = 1*diag([1,0.5]); % 控制量权重
Q_ = kron(eye(N),Q); % 利用K积将权重矩阵扩充到与Y相同维度
R_ = kron(eye(N),R);
B = [1,0;0,0;0,1]; % B 矩阵
B_ = dt*B; % B~ 矩阵
%% 二次型求解器设置(使用 interior-point-convex 算法,不显示迭代过程)
options = optimoptions('quadprog',...
'Algorithm','interior-point-convex','Display','off');
%% 滚动优化 (为了不处理最后N个时刻的特殊情况,循环只进行到 num_step-N )
tic;
figure(1);
hold on;
xlabel('x(m)');
ylabel('y(m)');
for k = 1:num_step-N
% 刻画每个时刻的参考位置和实际位置
plot(P(1,k),P(2,k),'b.');
plot(P_r(1,k),P_r(2,k),'r.');
drawnow;
% 计算当前时刻的 X
Tx = [cos(P(3,k)),sin(P(3,k)),0;
-sin(P(3,k)),cos(P(3,k)),0;
0,0,1];
X(:,k) = Tx*(P_r(:,k)-P(:,k));
% 计算当前时刻的 \Psi 和 \Theta
A = [0,u(2,k),0;-u(2,k),0,u_r(1,k);0,0,0]; % A 矩阵
A_ = eye(size(P,1))+dt*A; % A_ 矩阵
Psi = zeros(3*N,3); % 初始化 \Psi
Theta = zeros(3*N,2*N); % 初始化 \Theta
for j = 1:N
Psi(3*j-2:3*j,1:3) = A_^j; % \Psi 的第j块
for i = 1:j
Theta(3*j-2:3*j,2*i-1:2*i) = A_^(j-i)*B_; % \Theta 的第(j,i)块
end
end
% 计算 H 和 f
H = 2*(Theta'*Q_*Theta+R_);
f = (2*X(:,k)'*Psi'*Q_*Theta)';
% 调用 quadprog 求解器
[U_star,fval,exitflag,output,lambda] = quadprog(H,f,[],[],[],[],[],[],[],options);
% 输入控制量利用积分计算下一个位姿和误差
u_star = U_star(1:2); % 取出 U 的第一部分(前两项)
u =[u, u_r(:,k) - u_star]; % 计算实际线速度和角速度控制量
last_theta = P(3,k);
P =[P, P(:,k)+[cos(last_theta),0;sin(last_theta),0;0,1]*u(:,k+1)*dt];
end
toc;
%% 误差收敛速度
mse = sqrt(sum((X.^2),1));
figure;
plot(t(1:num_step-N),mse(1:num_step-N),'b-','LineWidth',1)
xlabel('t(s)');
ylabel('mse');
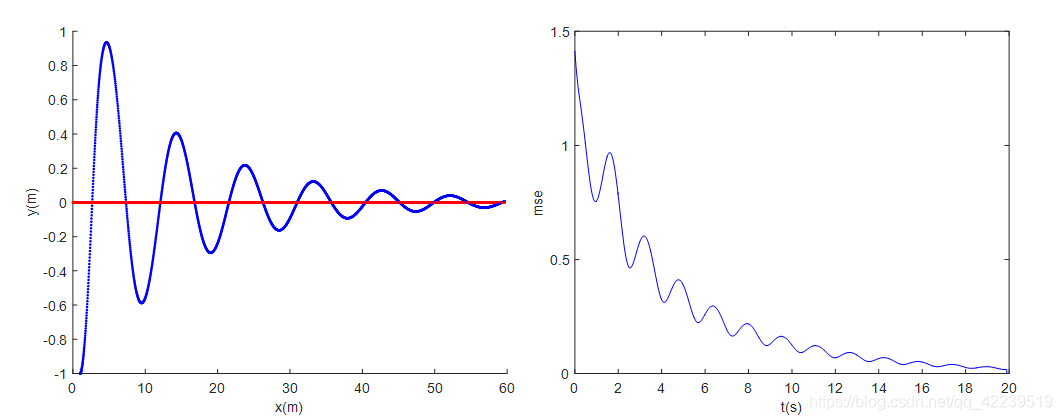
直线跟踪效果:
圆轨迹跟踪效果:
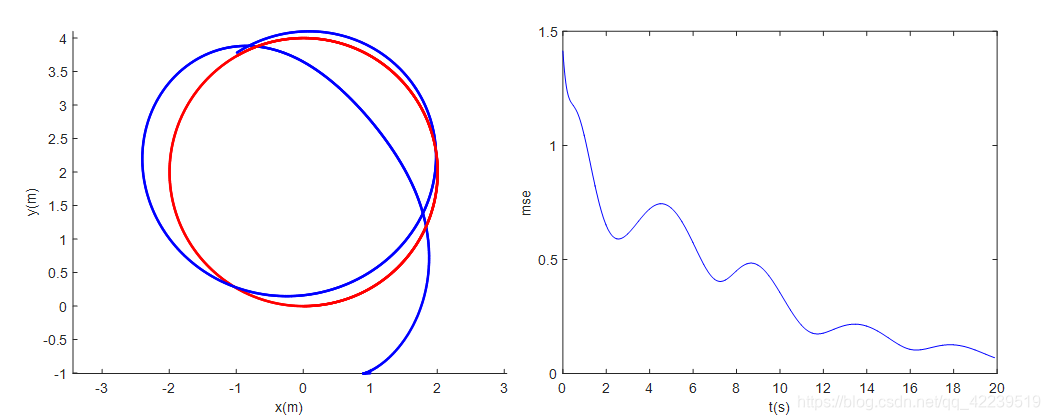
1.3结果分析
可以看到收敛速度较慢,有可能是权重影响的,可以自行修改参数进行仿真。另外还可以在quadprog求解器中加入控制量的约束,使其不要产生过大的加速度。














 2173
2173











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









