









1、为什么要做这个研究(理论走向和目前缺陷) ?
3D跟踪往往都太慢了,能否用传统方法组合实现比较好的结果。
2、他们怎么做这个研究 (方法,尤其是与之前不同之处) ?
没啥新东西,就是3D卡尔曼滤波(匀速运动模型)+匈牙利匹配。开发了一个3Dmot评估系统,并提出3个新的3D mot评估指标sAMOTA,AMOTA,AMOTP。
3、发现了什么(总结结果,补充和理论的关系)?
KITTI上达到207.4FPS,效果也不错。
摘要:很多3Dmot上的研究都不太关注计算量和系统复杂度,导致的结果就是这样研究出来的算法只能存在于实验室,无法落地实用。而本文提出的3Dmot方法,即AB3DMOT,就是简单的将3D卡尔曼滤波和匈牙利算法进行组合,却取得了非常好的效果,并能够在KITTI上达到207.4FPS。此外由于没有现成的对3Dmot的评估方法,以前都是在2D空间进行评估,本文开发了一个新的3D mot评估工具。
1、引言
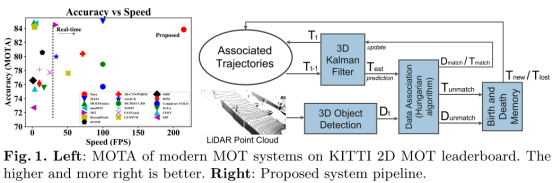
kitti上的2Dmot benchmark由于检测的突飞猛进,在近两年内MOTA从57.03刷到了84.04。但是所用的方法往往都计算巨大(CNN提取表观特征,GNN提取运动特征),且设计的系统极为复杂,不实用啊。
2、AB3DMOT:A Baseline for 3D MOT
算法框架
3D卡尔曼滤波器(匀速运动模型)+匈牙利匹配算法。
即使只是传统算法的组合,将其转换到2D空间中进行3Dmot评估,其效果依然很好,如下图,如下左图:
3、3D mot评估工具
由于没有评估3D mot的现成工具,所以大家都是先把3D跟踪结果投影 到2D图像空间,然后用KITTI 2D MOT工具来评估。这,不行!
于是作者基于2D mot评估工具开发了一套3D mot评估工具,主要修改就是将计算2D IoUd 方式改为计算3D IoU,直接在3D空间计算IoU,无需再投影到图像空间计算IOU了。
4、新的MOT评估度量
之前的MOTP和MOTA存在一个问题就是并没有考虑被跟踪目标的置信度,结果,要想评估,必须得手动设置一个阈值,将那些低置信度的跟踪目标先筛掉。但是确定阈值可不是容易事,不同的检测器或者不同的数据集,最优置信度阈值的一般是不同的。而且,仅用一个阈值就筛选无法全方位反应跟踪性能的好坏,可能这个阈值跟踪效果好而换个阈值跟踪效果就差了。理想效果应该是,MOT对检测置信度的筛选阈值不敏感,在一系列阈值上都能取得比较好的效果。
本文提出了3个新的mot评估指标sAMOTA, AMOTA, AMOTP。其中AMOTA, AMOTP是在所有召回率值的情况下计算出了的均值。
5、实验
数据集:KITTI 3D MOT,KITTI仅支持2D评估,为了实现3D评估,只能在KITTI验证集上进行3D评估。
基准:尽量和FANTrack以及mmMOT保持一致,即都用PointRCNN预测的3D检测结果作为检测输入。如果需要2D输入,就用3D检测的2D投影作为输入。
实验结果:如下图,惊奇发现IDS=0。
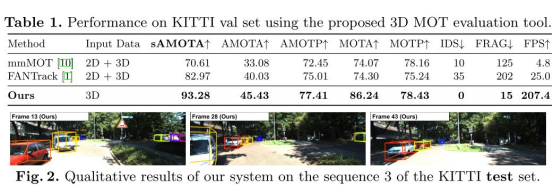
运行时间:仅用CPU就达到207.4FPS。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









