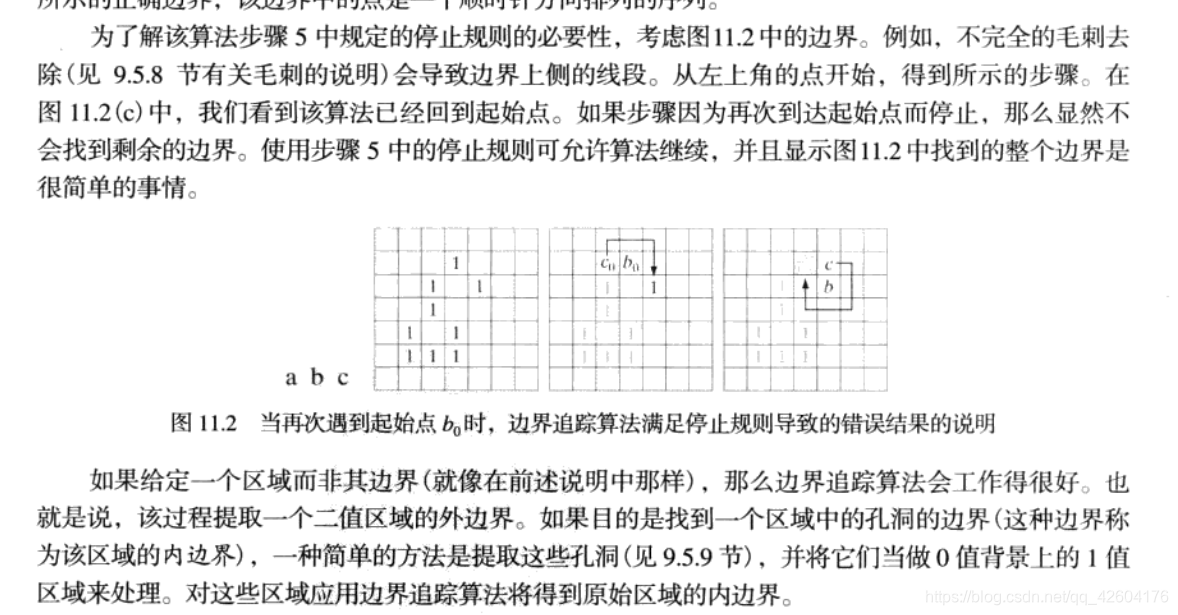
边界追踪目标: 输入:某一区域的点 输出:这一区域的点的坐标序列(顺时针或逆时针) Moore边界追踪法: 两个前提条件: 1、图像为二值化后的图像(目标为1,背景为0) 2、图像已使用值为0的边界填充,因而消除了目标与图像边界合并的可能。 算法步骤: 算法出现的下次以及改进:(更改算法结束的条件,不仅要求b=b0,而且要将所有点遍历)
























 9501
9501











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








