







目标检测近年来已经取得了很重要的进展,主流的算法主要分为两个类型(参考RefineDet):(1)two-stage方法,如R-CNN系算法,其主要思路是先通过启发式方法(selective search)或者CNN网络(RPN)产生一系列稀疏的候选框,然后对这些候选框进行分类与回归,two-stage方法的优势是准确度高;(2)one-stage方法,如Yolo和SSD,其主要思路是均匀地在图片的不同位置进行密集抽样,抽样时可以采用不同尺度和长宽比,然后利用CNN提取特征后直接进行分类与回归,整个过程只需要一步,所以其优势是速度快,但是均匀的密集采样的一个重要缺点是训练比较困难,这主要是因为正样本与负样本(背景)极其不均衡(参见Focal Loss),导致模型准确度稍低。不同算法的性能如图1所示,可以看到两类方法在准确度和速度上的差异。
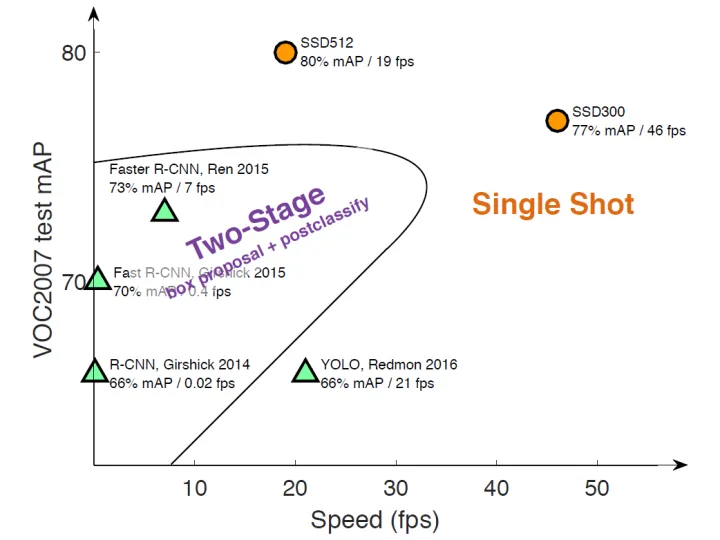
图1 不同检测算法的性能对比
本文讲解的是SSD算法,其英文全名是Single Shot MultiBox Detector,名字取得不错,Single shot指明了SSD算法属于one-stage方法,MultiBox指明了SSD是多框预测。在上一篇文章中我们已经讲了Yolo算法,从图1也可以看到,SSD算法在准确度和速度(除了SSD512)上都比Yolo要好很多。图2给出了不同算法的基本框架图,对于Faster R-CNN,其先通过CNN得到候选框,然后再进行分类与回归,而Yolo与SSD可以一步到位完成检测。相比Yolo,SSD采用CNN来直接进行检测,而不是像Yolo那样在全连接层之后做检测。其实采用卷积直接做检测只是SSD相比Yolo的其中一个不同点,另外还有两个重要的改变,一是SSD提取了不同尺度的特征图来做检测,大尺度特征图(较靠前的特征图)可以用来检测小物体,而小尺度特征图(较靠后的特征图)用来检测大物体;二是SSD采用了不同尺度和长宽比的先验框(Prior boxes, Default boxes,在Faster R-CNN中叫做锚,Anchors)。Yolo算法缺点是难以检测小目标,而且定位不准,但是这几点重要改进使得SSD在一定程度上克服这些缺点。下面我们详细讲解SDD算法的原理,并最后给出如何用TensorFlow实现SSD算法。
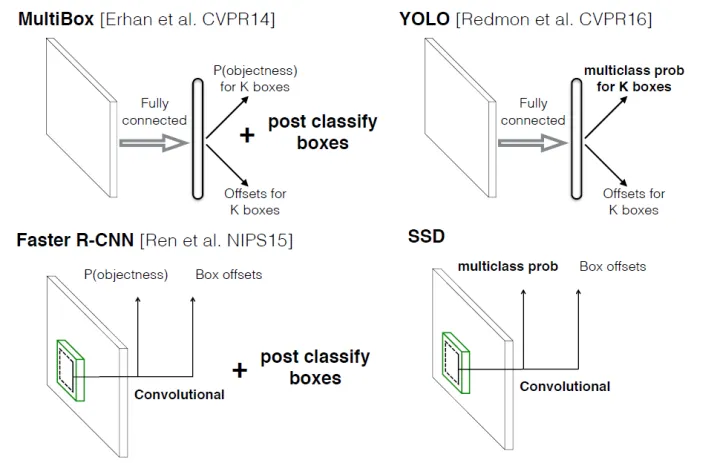
图2 不同算法的基本框架图
设计理念
SSD和Yolo一样都是采用一个CNN网络来进行检测,但是却采用了多尺度的特征图,其基本架构如图3所示。下面将SSD核心设计理念总结为以下三点:
图3 SSD基本框架
(1)采用多尺度特征图用于检测
所谓多尺度采用大小不同的特征图,CNN网络一般前面的特征图比较大,后面会逐渐采用stride=2的卷积或者pool来降低特征图大小,这正如图3所示,一个比较大的特征图和一个比较小的特征图,它们都用来做检测。这样做的好处是比较大的特征图来用来检测相对较小的目标,而小的特征图负责检测大目标,如图4所示,8x8的特征图可以划分更多的单元,但是其每个单元的先验框尺度比较小。
图4 不同尺度的特征图
(2)采用卷积进行检测
与Yolo最后采用全连接层不同,SSD直接采用卷积对不同的特征图来进行提取检测结果。对于形状为 m×n×p 的特征图,只需要采用 3×3×p 这样比较小的卷积核得到检测值。
(3)设置先验框
在Yolo中,每个单元预测多个边界框,但是其都是相对这个单元本身(正方块),但是真实目标的形状是多变的,Yolo需要在训练过程中自适应目标的形状。而SSD借鉴了Faster R-CNN中anchor的理念,每个单元设置尺度或者长宽比不同的先验框,预测的边界框(bounding boxes)是以这些先验框为基准的,在一定程度上减少训练难度。一般情况下,每个单元会设置多个先验框,其尺度和长宽比存在差异,如图5所示,可以看到每个单元使用了4个不同的先验框,图片中猫和狗分别采用最适合它们形状的先验框来进行训练,后面会详细讲解训练过程中的先验框匹配原则。
图5 SSD的先验框
SSD的检测值也与Yolo不太一样。对于每个单元的每个先验框,其都输出一套独立的检测值,对应一个边界框,主要分为两个部分。第一部分是各个类别的置信度或者评分,值得注意的是SSD将背景也当做了一个特殊的类别,如果检测目标共有 c 个类别,SSD其实需要预测 c+1 个置信度值,其中第一个置信度指的是不含目标或者属于背景的评分。后面当我们说 c 个类别置信度时,请记住里面包含背景那个特殊的类别,即真实的检测类别只有 c−1 个。在预测过程中,置信度最高的那个类别就是边界框所属的类别,特别地,当第一个置信度值最高时,表示边界框中并不包含目标。第二部分就是边界框的location,包含4个值 (cx,cy,w,h) ,分别表示边界框的中心坐标以及宽高。但是真实预测值其实只是边界框相对于先验框的转换值(paper里面说是offset,但是觉得transformation更合适,参见R-CNN)。先验框位置用 d=(dcx,dcy,dw,dh) 表示,其对应边界框用 b=(bcx,bcy,bw,bh) 表示,那么边界框的预测值 l 其实是 b 相对于 d 的转换值:

















 5121
5121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









